浮式防波堤拖航阻力数值模拟与试验
2015-08-26阚俊伟蒋志勇
阚俊伟,蒋志勇
(江苏科技大学船舶与海洋工程学院,江苏 镇江 212003)
0 引言
随着人们对沿海和近岸地区开发利用的不断增加,浮式防波堤作为一种新型的防波堤逐渐取代了传统类型的浮式防波堤。较传统型浮式防波堤而言,它具有重量轻、结构简单、造价便宜以及对地基的要求低等特点。此外,浮式防波堤海水交换能力较强,对于工作水域的整体性和生态环境的影响不大,不会造成水流的改变以及泥沙的沉积。
对于浮式防波堤的运输方式很多,湿拖则是其中的一种,即利用拖船对浮式防波堤进行拖航。而拖航阻力的大小则直接影响到拖航过程的经济、安全,所以对于浮式防波堤的拖航阻力的数值模拟与试验十分重要。
1 浮式防波堤模型介绍
文中所研究的浮式防波堤为圆筒型浮式防波堤,单个模型如图1所示。浮式防波堤主要由2个空心水泥筒和14根水泥连接柱以及防浪网组成。2个空心浮筒的外径为4 m,内径为3.7 m,壁厚为0.15 m,长度为20 m。2个浮筒间的空隙宽度为2 m,中间用14根间距均为1.5 m的圆柱横撑连接,横撑直径为0.5 m。防浪网的高度为7.5 m,中间的网目尺寸为40 mm,网线的粗度是210 D/90股 (2.35 mm)。此外在防浪网中还添加了浮力等于重力的橡胶小球,橡胶小球的材料是聚乙酸乙烯酯,它的密度为1200 kg/m3,外径为0.15 m,内径为0.079 m,橡胶小球的总数约占网笼体积的1/3。防浪网下面设置的重块为5 kg的石块。圆筒型浮式防波堤的总重量约为260 t,吃水约为2 m,重心的垂向高度约为2.171 m。
2 拖航过程
浮式防波堤在工作状态下防浪网放置于水下,但是在拖航过程中为了减小拖航的阻力降低成本,故将防波堤以倒置的方式拖航,使得防浪网朝上已达到减小阻力的效果,如图2所示。

图2 圆筒型浮式防波堤拖航状态图示Fig.2 Towing state diagram of cylindrical floating breakwater
为了降低拖航成本,将浮式防波堤以6个为一组的方式进行绑扎,也就是说每一组将3个防波堤串联绑扎在一起,并排摆放2组防波堤,每个浮式防波堤之间通过绑扎绳进行连接,形成了2×3=6个防波堤组合进行拖航。由于圆筒型浮式防波堤的前部是平整的圆面,根据林坚等在《浮式防波堤拖航阻力性能研究》中提到,圆筒型浮式防波堤的平整圆面在拖航的过程中会导致拖航阻力的增加。为了减小拖航作业的成本,仿照船舶首部加装球鼻首的方法,另外准备了几个可以拆卸的锥头,锥头高为0.2 m,拖航示意图如图3所示。

图3 浮式防波堤拖航方案示意Fig.3 Program of towing floating breakwater
3 数值模拟
3.1 网格划分及边界条件
本文通过FINE/Marine软件对浮式防波堤的拖航阻力进行数值模拟,为了能够与圆筒型浮式防波堤的模型试验结果进行对比,所以对于计算模型以圆筒型浮式防波堤为原型,采用1∶20的比例进行建模 (母型浮式防波堤长20 m,宽10 m,筒径4 m)。
根据浮式防波堤拖航时的组合,为了保证计算的精度,将整个计算域设为长、宽、高分别为15.2 m,6.08 m,9.12 m。计算域水深为7.6 m,水面以上为空气,其中圆筒型浮式防波堤的进水端为3.04 m。浮式防波堤的网格数目为2486571,网格质量良好,可以保证数值计算的精度,网格划分如图4所示。

图4 计算控制区域网格划分Fig.4 Computation control domain meshing
本文浮式防波堤计算模型的边界条件如下:计算域的上下表面均为指定压力边界,对于计算域的左右两面和出入流面均为速度远场边界。
3.2 计算工况
本文采用在静水中进行拖航数值模拟,通过改变拖航航速对浮式防波堤的拖航阻力进行计算,航速分别为4 kn,5 kn,6 kn,7 kn,8 kn及9 kn。为了保证实体与模型的傅汝德数Fr相等,航速换算如表1所示。

表1 航速换算结果Tab.1 Conversion results of speed
3.3 数值结果分析
图5为浮式防波堤在静水中拖航阻力的数值模拟。从图中可以发现随着航速的增加,拖航阻力呈现递增的趋势。当航速为4 kn时,拖航阻力为4.87 N,当航速达到9 kn时,拖航阻力已增到27.41 N,是4 kn航速时的5.6倍。从图中来看,曲线的增加趋势越来越大,说明航速越大对浮式防波堤的拖航阻力影响越大。
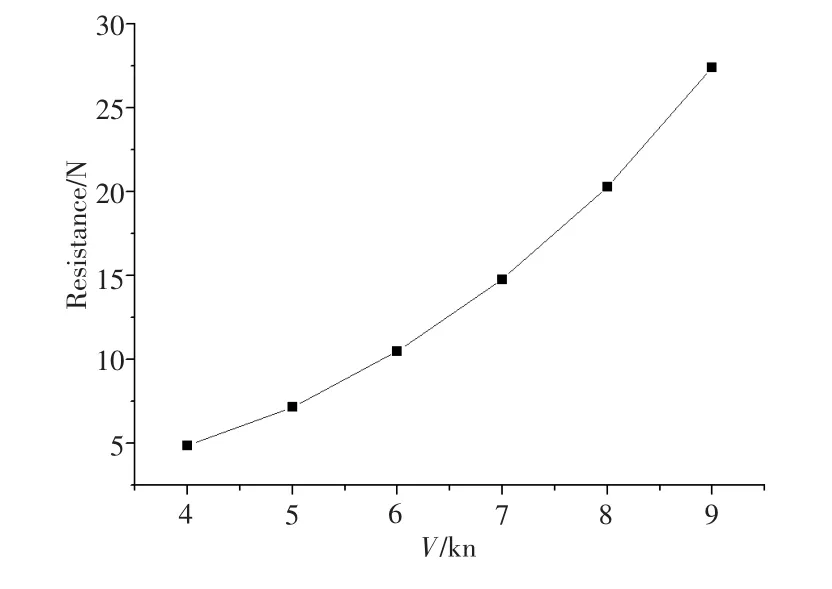
图5 拖航阻力数值模拟Fig.5 Numerical simulation of the towing resistance
4 模型试验
4.1 试验概况
浮式防波堤的模型试验在江苏科技大学船舶与海洋工程学院的船模拖曳水池中完成。拖曳水池长为100 m,宽为6 m,水深为2 m,拖车的最高航速为6 m/s。与数值模拟相同,模型也按照1∶20的比例进行制作。根据相似性原理,模型参数如表2所示。

表2 浮式防波堤试验模型参数列表Tab.2 List of parameters of experimental floating breakwater models
由于拖航过程中,圆筒型浮式防波堤以6个为一组,所以以上浮式防波堤模型总数为6个,每个模型的尺寸规格都一样。本次试验模拟的是静水中的拖航过程,通过改变拖曳速度来进行模型试验。
4.2 试验数据采集及试验过程
模型按照预定要求进行绑扎,以6个为一组进行拖曳试验,具体情况如图6所示。

图6 实验示意图Fig.6 The figure of test model
本次试验利用电测式阻力仪对拖曳阻力进行测量,阻力仪被安装在拖车上,通过拖线将阻力仪与浮式防波堤的首端进行连接。按照试验速度启动拖车,当拖车速度达到预定值后,读取此时的阻力值。测量完成后,在拖车减速的同时将浮式防波堤进行制动。然后再将拖车退回到起始位置,在水面平静后再进行下一步试验。同时,对水池的温度进行记录。
4.3 试验结果
图7为浮式防波堤模型试验所得的拖曳阻力情况图。从图中可以看出,随着航速的递增,拖曳阻力不断递增。在速度为4~6 kn时,拖曳阻力增加较为平缓。但是当航速继续增加时,曲线更加陡峭,阻力变化较大。说明在高航速下拖航时,浮式防波堤的拖航阻力更大,不利于拖航的经济和安全。
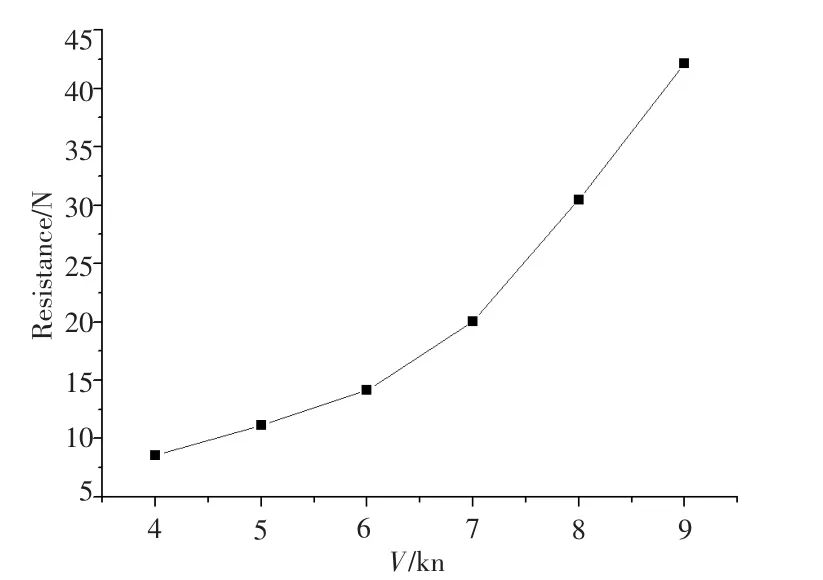
图7 拖航阻力试验Fig.7 Towing resistance test
5 数值模拟与试验结果比较
为了能够更好地研究浮式防波堤的拖航阻力情况,将数值模拟结果与模型试验结果进行比较,如图8所示。

图8 拖航阻力比较Fig.8 The comparison of towing resistance
图8为浮式防波堤拖航阻力的数值模拟与模型试验的结果比较。从图中可以看出,模型试验结果比数值模拟的结果大。这是因为随着航速的增加,两者之间的差值也在不断递增,由4 kn时的3.72 N递增至9 kn时的14.72 N。在航速为4~7 kn时,数值模拟与模型试验的曲线变化程度相似,但是航速继续增加时模型试验的阻力变化曲线更陡,变化更大。
6 结语
1)浮式防波堤的拖航阻力随着航速的增加呈现递增趋势,当到达航速时拖航阻力的增加趋势更为明显。
2)浮式防波堤的拖航阻力试验结果比数值模拟结果较高,随着航速的增加,差值呈现上升的趋势。
3)当航速在4~7 kn时,数值模拟与模型试验的阻力增加曲度类似,但是随着航速的继续增加,拖航阻力增加值更大,曲线变陡。
4)此种浮式防波堤在航速为4~7 kn时,拖航更利于保证拖航过程的经济、安全。
[1]陈翔.新型浮式防波堤的设计与性能分析[D].镇江:江苏科技大学,2015.
[2]杨大明,施奇,尹赞凯.某改型低速船模型阻力试验[J].中国水运,2008,8(10):28 -30.
[3]林坚.浮式防波堤运输安全及运动性能研究[D].镇江:江苏科技大学,2015.
[4]杨西阳.大型海洋结构拖航阻力分析与应急风险评估[D].天津:天津大学,2012,11.
[5]OGILVIE T F,TUCK E O.A rational strip theory for ship motions[R].Part1,Report No.013,Depts.Naval Aich.and Marine Engineering,University of Michigan,AlinArbor,1969.
[6]CHEN G R,FANG M C.Hydrodynamic interactions between two ships advancing in waves[J].Ocean Engineering,2001(28):1053-1078.
[7]郑小龙,黄胜,尚秀敏.基于CFD的船舶阻力预报方法研究[J].江苏科技大学学报(自然科学版),2014,28(2):109-113.
[8]船舶与海洋工程专业仿真平台FINE/Marine.
[9]石丽娜.基于AQWA的大型浮体拖航性能研究[D].大连:大连理工大学,2011.
[10]赵鹏举.船舶拖航仿真研究[D].哈尔滨:哈尔滨工程大学,2008.
