北京市重型客车行驶工况的构建与研究
2015-08-24杨小娟王建
杨小娟,王建*
北京市重型客车行驶工况的构建与研究
杨小娟1,2,3,王建1,2,3*
1.北京航空航天大学交通科学与工程学院,北京100191 2.车路协同与安全控制北京市重点实验室,北京100191 3.新能源汽车高效动力传动与系统控制北京市重点实验室,北京100191
采用自主行驶法采集北京市重型客车行驶数据。利用自主研发的GPS车辆信息管理系统监控及采集配备行驶记录仪的400多辆试验车辆2个月的行驶数据。利用小波变换法处理数据并进行短行程划分。通过主成分分析法和K均值聚类分析法提取运动学片段的主成分进行分类。结合“最佳增量法”与“组合法”构建速度变化曲线作为代表性行驶工况。通过对特征参数和速度-加速度联合概率分布进行验证,得出构建的工况能综合反映北京市重型客车的行驶特点;通过与国内外代表性行驶工况进行对比,发现构建的北京市重型客车行驶工况有怠速时间较短,加减速段时间比例适中,匀速行驶时间比例高等特点,与北京市乘用车、公交车行驶工况以及欧洲等发达国家的交通模式相差较大。
行驶工况;自主行驶法;主成分分析法;聚类分析;重型客车
杨小娟,王建.北京市重型客车行驶工况的构建与研究[J].环境工程技术学报,2015,5(6):455-463.
YANG X J,WANG J.Construction and research of heavy-coach's driving cycle in Beijing city[J].Journal of Environmental Engineering Technology,2015,5(6):455-463.
车辆道路行驶工况是针对某一类型车辆在特定交通环境下的车辆行驶特征的速度-时间曲线,可为确定车辆污染物排放量和燃油消耗量,新车型的技术开发和评估以及设计车辆动力匹配提供参考依据[1]。目前,广泛采用的车辆道路行驶工况主要包括美国车辆道路行驶工况(FTP75)、欧盟车辆道路行驶工况(ECE15+EUDC)[2-4]和日本车辆道路行驶工况(JPAN10)[5]。
据工业和信息化部统计[6],我国汽车油耗约占石油年消耗总量的50%,重型商用车(>3.5 t,占汽车总量13.9%)油耗占汽车年总油耗的49.2%。虽然我国重型商用车数量远少于乘用车,但其消耗的燃油却与乘用车几乎相当。
目前,我国重型商用车燃油消耗量测试采用C-WTVC循环工况,该工况是以世界统一的重型商用车辆瞬态车辆循环(world transient vehicle cycle,WTVC)为基础,调整加速度和减速度形成的驾驶循环工况。C-WTVC是过渡性的行驶工况方案,不能反映我国具体的道路交通状况,需开发适合我国国情的行驶工况。我国有关乘用车行驶工况的构建与分析方面已有一定的研究,但对于其他车辆类型行驶工况的研究涉及较少。客车在市区和郊区的分布及运行规律不同于乘用车,在郊区及高速路上行驶的比例要高于乘用车。
利用试验仪器采集车辆道路行驶工况数据的方法有平均车流统计法、车辆跟踪法、自主行驶法3种。为使构建的车辆道路行驶工况能够全面反映车辆道路行驶的真实情况,使其更具代表性,笔者使用不选定线路的自主行驶法采集数据,不限定行驶区域、行驶线路和行驶时间。
主成分分析法和聚类分析法被广泛应用于车辆道路行驶工况的构建[7-9]。主成分分析法是处理多维数据的统计学方法。本试验将主成分分析法和K均值聚类分析法有机结合,应用到车辆道路行驶工况的构建中。
为准确评估重型客车的排放和油耗水平,将重型客车在北京市市区、郊区、高速路的行驶状态相结合,构建一套能够真实反映北京市重型客车运行特征的复合车辆行驶工况。
1 试验原理
1.1短行程
汽车行驶大致可分为怠速、加速、匀速和减速4个状态。汽车行驶过程由多个启停过程组成,从运动学角度用短行程来描述车辆一次启停。短行程,是指包含1个怠速段和1个运行段的运动学片段,且该运行段最少包含1个加速和1个减速状态[10]。
短行程的划分方法分为2类:1)从某个怠速起点到下个怠速起点;2)从某个怠速终点到下个怠速终点(图1)。怠速起点t时刻满足vt>0且vt-1>0,怠速终点t时刻满足vt=0且vt+1>0。采用第1类划分法处理数据,对短行程4种工况定义如下:1)怠速工况,指发动机工作且v=0的连续运转过程;2)加速工况,a(加速度)≥0.15 m/s2且v≠0的连续运转过程;3)减速工况,a≤-0.15 m/s2且v≠0的连续运转过程;4)匀速工况,|a|≤0.15 m/s2且v≠0的连续运转过程[11]。

图1 短行程划分示意Fig.1 Sketch map of short stroke division
1.2小波变换理论
小波变换是信号的时间-尺度分析方法,在时频两域都具有表征信号局部特征的能力[12]。
由于交通干扰会引起车辆行驶速度波动,把汽车行驶过程看作随时间变化的离散信号,采用多分辨信号分解算法,选择合适的交通原始数据采集路段,对采集的试验数据经过小波变换,消除路面干扰引起的速度波动,去除信号中繁琐和冗余的部分,同时保留原始数据的特征和规则性。将含有干扰的原始信号(S(0))分解为离散逼近(S(1))和离散细节(D(1))2个部分,S(1)进一步分解为{S(2),D(2)},由于是正交分解,因此由S(j)和{D(j),D(j-1),…,D(1)}可重构得到原始信号S(0)。
对汽车行驶工况信号进行小波变换,对高频系数进行阈值处理,每一尺度的高频信号选择不同阈值。高频小波变换系数阈值根据相应尺度上小波变换系数的最大绝对值来确定。各尺度上保留绝对值大于等于阈值的系数。
1.3主成分分析法
主成分分析法是将多个变量通过线性变换,重新组合成一组相互线性无关的综合指标来代替原来指标的统计分析方法。
设有n个样本,每个样本有p个变量,构建一个n×p阶数据矩阵:

(x1,x2,…,xp)为原变量指标。根据原变量指标,得到新变量指标(z1,z2,…,zm(m≤p))方程组:
系数lij的确定原则:zi与 zj(i≠j;i,j=1,2,…,m)相互无关;z1是x1,x2,…,xp一切线性组合中方差最大值,z2是与z1不相关的x1,x2,…,xp的所有线性组合中方差最大值;zm是与z1,z2,…,zm-1都不相关的x1,x2,…,xp所有线性组合中方差最大值。新变量指标(z1,z2,…,zm)分别称为原变量指标(x1,x2,…,xp)的第1,第2,...,第m主成分。主成分分析的实质就是确定原来变量xj(j=1,2,…,p)在各主成分zi(i=1,2,…,m)上载荷。从数学角度可以证明,zi和xj分别是相关矩阵m个较大的特征值所对应的特征向量。
计算相关系数矩阵(R)[13]:
式中:rij(i,j=1,2,…,p)为原变量xi与xj的相关系数,rij=rji。rij的计算公式为:
1.4聚类分析法
K均值聚类分析法又称快速聚类法[14],其具体计算步骤如下:
(1)根据给定的聚类数目n,按照一定的标准选择某些观测量(如{c1,c2,…,cn})作为初始聚类中心,简称聚心。
(2)计算每个观测量到各聚心的欧氏距离(dij),按照就近原则将每个观测量选入某个类中,然后计算各类的中心位置,即均值作为新的聚心。

(3)使用新聚心重新进行分类,分类完毕后继续计算各类的中心位置,作为新的聚心,如此反复操作,直到2次迭代计算的聚心之间距离的最大改变量小于初始聚心间最小距离的q(q一般取0.02)倍,或者达到迭代次数的上限时,停止迭代。
2 车辆道路行驶工况的构建
2.1试验道路的选择
车辆道路行驶工况主要受道路等级(包括快速路、主干道、次干道以及支路)、交通强度(车辆流量、周转量或饱和度)、交叉口密度(路段内交叉型和数量)以及时间等的影响[15-16]。
因此,教育需要“引”而非“领”,很显然,这种教育方式更优。正如黄侃所赞成的观念:术由师受,学自己成。“引导”这种教育方式能够使被教育者摆脱依赖的心理,从而产生极大的自主权。
目前,大部分研究采用选定线路+少数车辆的调查方法。近年来出现不选定线路+大批量选定车籍车辆调查方法,该方法不受制于试验道路与数据采集时间。把不选定线路+大批量选定车籍车辆调查方法与选定线路+少数车辆的调查方法进行对比发现,前者是驾驶员按照各自的目的正常驾驶车辆,在不限定行驶区域,行驶线路,行驶时间的情况下自主行驶,这需要在大批量调查和车籍选择的基础上进行。
为了使构建的道路行驶工况能够全面反映道路的真实情况,更具有代表性,采用不选定线路自主行驶法采集数据。为了使采集的数据具有不同速度的行驶特征,对数据采集的地域进行选定,主要覆盖北京市市郊区,包括低速、中速、高速的道路行驶模式。采用自主研发的GPS车辆信息管理系统监控及采集配备行驶记录仪的400多辆试验车辆2个月的行驶数据。试验车辆选取质量大于3.5 t的重型客车。设置试验行驶记录仪每隔1 s自动记录和储存1次数据。行驶过程中主要采集车辆速度、运行时间等参数。
2.2短行程特征参数
定义了描述运动学片段特征的16个短行程一类特征参数和21个描述运动学片段特征统计分布的短行程二类特征参数(表1和表2),其中短行程一类特征参数用于主成分分析和K均值聚类分析法,短行程二类特征参数用于从短行程分类中挑选满足特定条件的运动学片断和有效性判定。

表1 短行程一类特征参数Table1 Characteristic parameters of short stroke
2.3数据处理
对采集的数据进行预处理后,利用MATLAB将数据分为3 012个运动学片段,分别求出总体试验数据及各运动学片段的特征参数,得到1个以运动学片段为样本,样本数量(行)×特征参数(列)的矩阵(表3)。
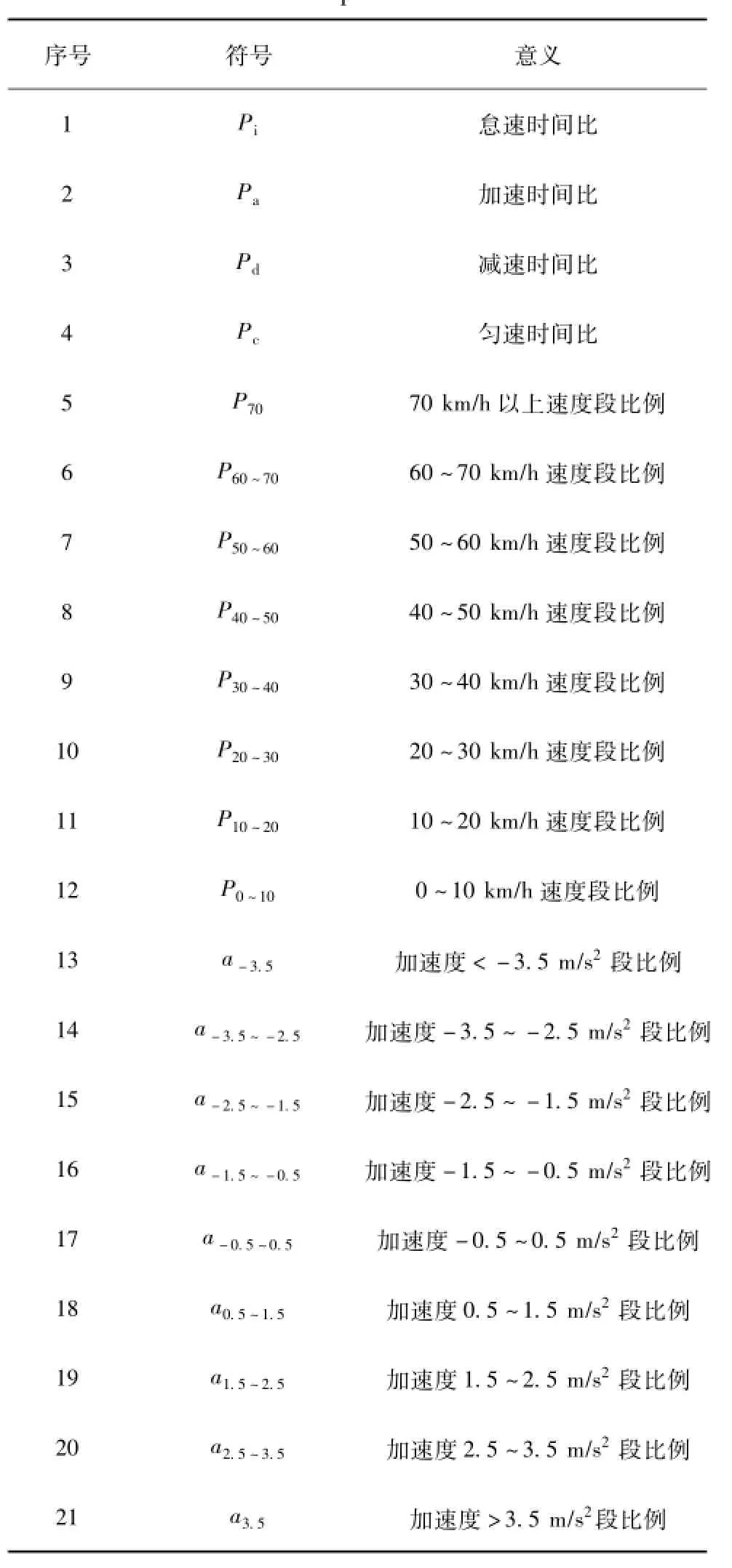
表2 短行程二类特征参数Table 2 Two feature parameters of short stroke
采用Daubechies小波对数据进行了3层(尺度1、尺度2、尺度3)小波压缩分解,得到尺度3的低频系数和尺度3、2、1的高频系数,并在此基础上对分解的低频小波变换系数和高频小波变换系数进行了重构。原始试验数据和经小波变换处理后的数据对比见图2。由图2可以看出,小波变换保留了原始数据的主要特征。
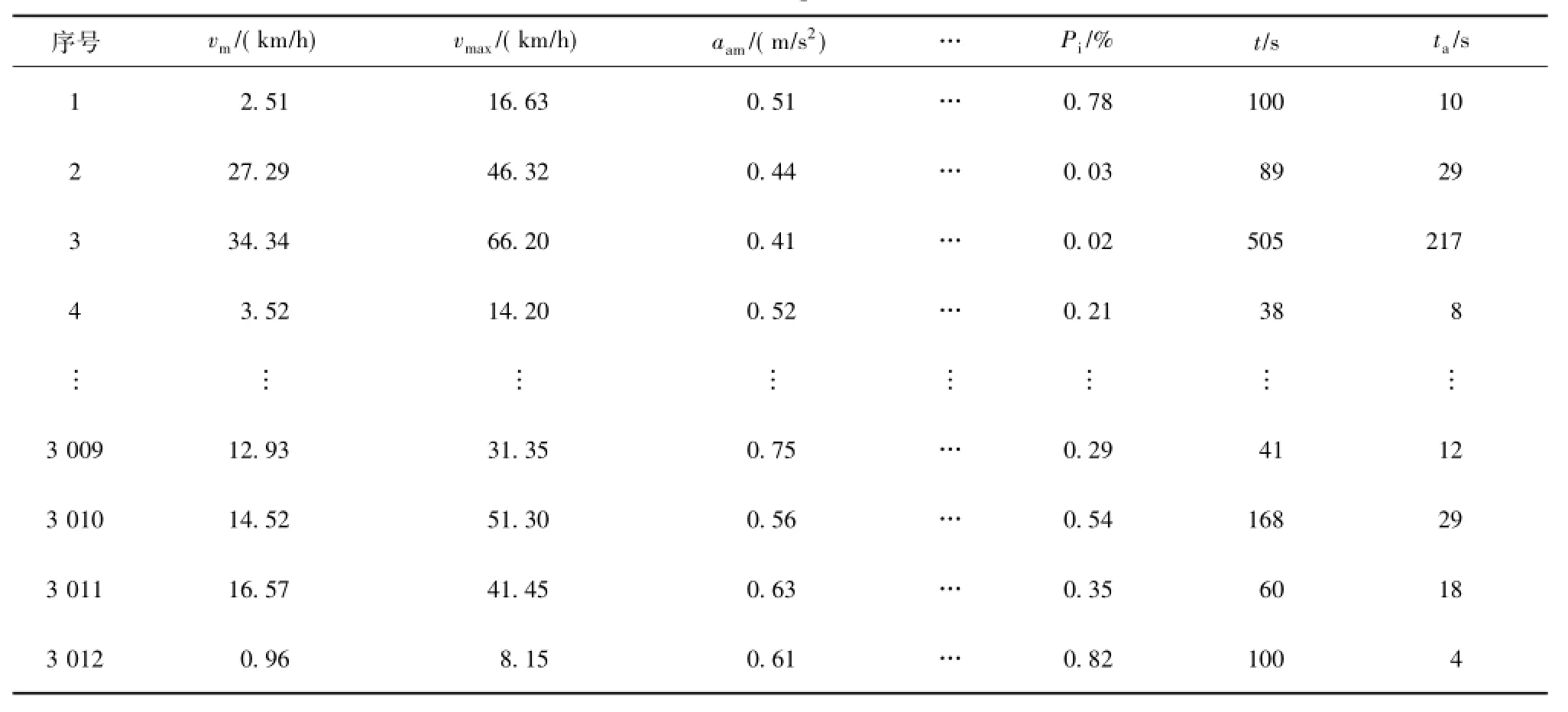
表3 运动学片段特征矩阵Table 3 Kinematic fragment featurematrix

图2 试验数据小波变换分析对比Fig.2 Data wavelet transform analysis and comparison chart
2.4数据分析
为更好地反映短行程的特征,选取了16个参数来表示短行程信息,但直接用参数进行分类会增加计算难度,需进行降维。主成分分析法是实用性很强的降维方式,在保证原有信息基本不变的情况下,可减少变量的个数。
利用SPSS软件对得到的运动学片段特征参数矩阵进行主成分分析,各主成分的贡献率及累积贡献率见表4。m1~m44个主成分的累积贡献率为80.579%,理论上,如果前几个主成分的累积贡献率超过80%,那么这几个主成分基本代表了运动学片段特征参数的所有信息,因此选取m1~m44个主成分代表所有特征参数。

表4 各主成分贡献率及累积贡献率Table 4 Contribution rate and cumulative contributionrate ofmain components
进一步分析得到各主成分的载荷矩阵,m1~m44个主成分与16个特征参数的相关系数如表5所示。由表5可知:1)第1主成分主要反映平均速度、运行速度、最大车速、最大减速度、运行时间、运动学片段行驶距离、速度标准偏差、行停比、加速时间、匀速时间、减速时间;2)第2主成分主要反映了减速段平均减速度、加速度标准偏差、加速时间比例;3)第3主成分主要反映了怠速时间、怠速时间比例、减速时间比例、匀速时间比例;4)第4主成分主要反映了最大加速度、加速段平均加速度。
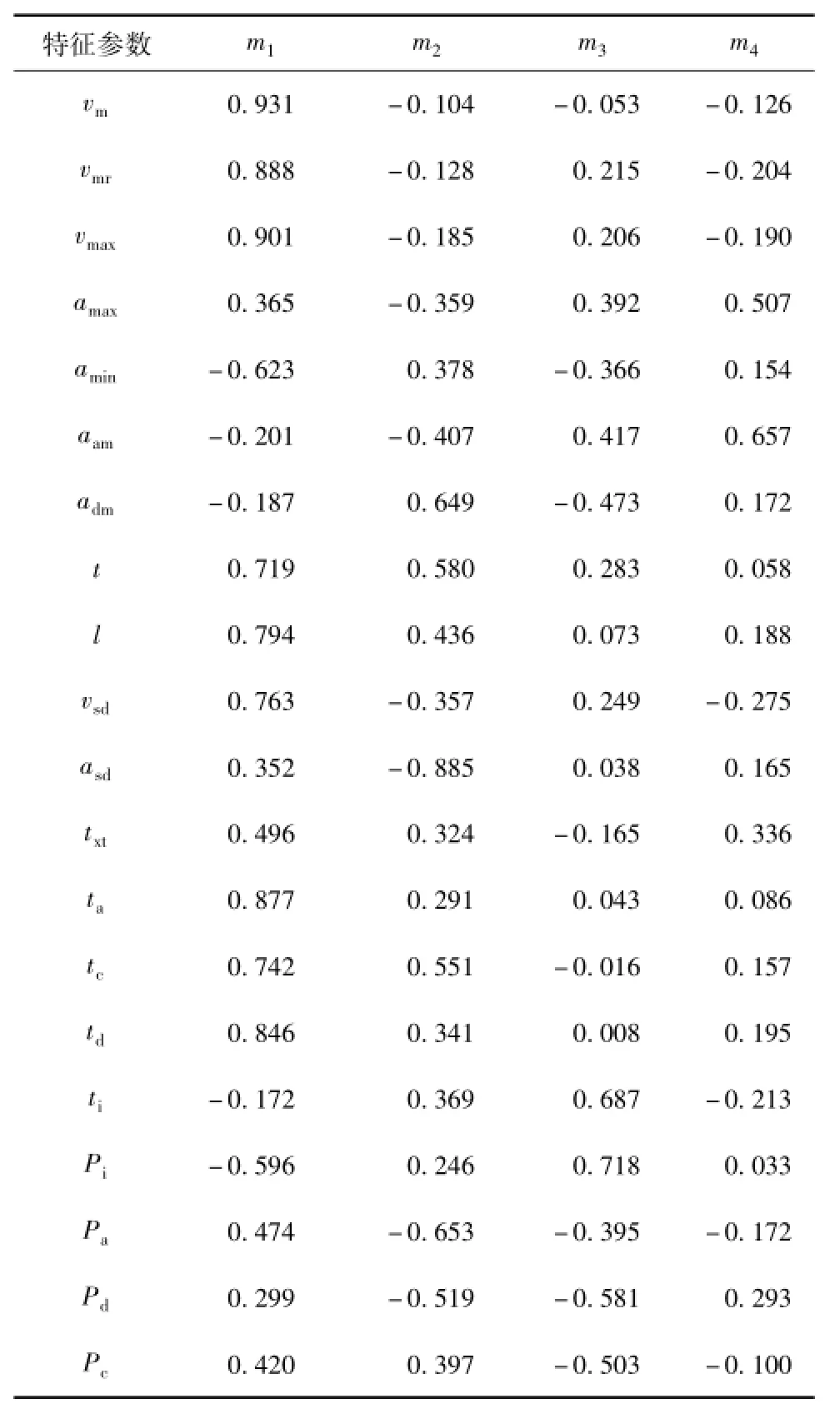
表5 主成分载荷矩阵Table 5 Principal component load matrix
2.4.2K均值聚类分析法
根据动态聚类分析理论,运用SPSS软件和快速聚类分析法对主成分分析法得到的运动学片段进行了样本动态聚类分析,得到特征值相近、交通特征相似度高的反映3种交通类型的3类运动学片段,结果见表6。由表6可知,3 012个运动学片段被分成了3类:第1类包含1 464个片段;第2类包含1 417个片段;第3类包含131个片段。
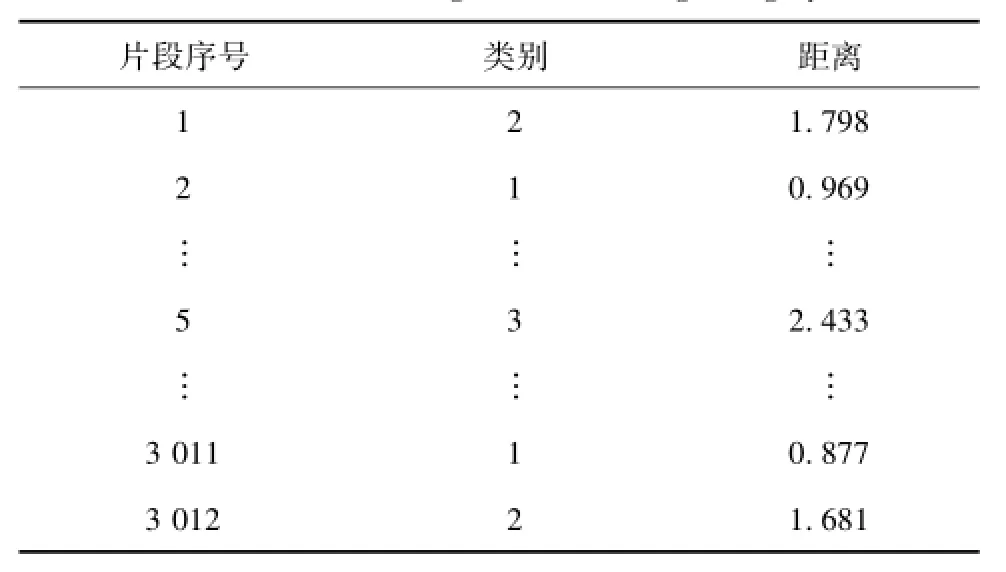
表6 各运动学片段的聚类类别Table6 Each fragment clustering category
图3显示了总体样本3种分类下各自的4种行驶模式时间比。

图3 3种类别各行驶模式时间比Fig.3 Three types of travelmode time ratio
聚类数据综合特征值如表7所示。由表7可知,第1类代表车辆在主干道上中速运行的模式,其平均运行时间为145.313 s,加减速时间比最高,速度主要分布在30~40 km/h,说明该道路比较畅通,最高速度不超过107.717 km/h。第2类代表车辆在拥堵道路低速运行的模式,其平均运行时间为109.677 s,由于道路比较拥堵车流量被限制,所以怠速时间比最高,匀速时间比最低,速度主要分布在0~30 km/h,最大速度不超过61.385 km/h。第3类代表车辆在快速路上高速运行的模式,其平均运行时间为766.038 s,匀速时间比最高,说明该道路比较畅通,怠速时间比最低,有比较高的运行速度,速度在70 km/h以上的比例最高,为26.8%。

表7 聚类数据综合特征值Table 7 Comprehensive eigenvalues of clustering data
2.5行驶工况的构建与验证
采用“最佳增量法”与“组合法”相结合的方式,即行驶工况的起始片段随机选取1个短行程,之后逐步寻找并增加1个短行程,使加入短行程后的行驶工况特征值误差及速度-加速度联合分布比之前更接近试验数据,否则另选其他短行程,如此不断加入新的短行程,直到行驶工况达到规定的时间长度为止。从3类数据中按照时间比构建代表性行驶工况(图4),其特征值相对误差如表8所示。
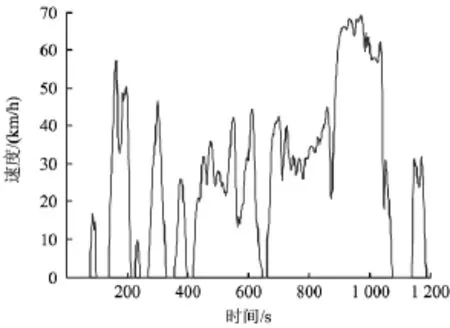
图4 代表性行驶工况Fig.4 Comprehensive representative driving cycle

表8 代表性行驶工况与原始数据对比Table 8 Comparison of representative driving cycles and raw data
由表8可知,所构建的代表性行驶工况与原始数据的误差都小于10%,且其平均相对误差仅为4.02%,因此,所构建的代表性行驶工况是合理的。
从速度和加速度2个角度同时验证行驶工况与原始数据之间的差异,是比较严格的验证方法,采用速度-加速度联合分布图(图5)来验证行驶工况。在MATLAB中编写计算速度-加速度矩阵的m函数,并得到联合分布图(图6)。
从图6可以看出,概率误差最大绝对值没有超过10%,在速度区间[0,20]km/h和加速度区间[0,1]m/s2内的概率误差绝对值较大,其他区域内起伏不是很大,从整体上看,构建的行驶工况误差是可接受的。由此说明,构建的代表性行驶工况能综合反映北京地区重型客车的实际行驶特点。

图5 原始数据速度-加速度联合分布Fig.5 Integrated data rate acceleration combined distribution chart
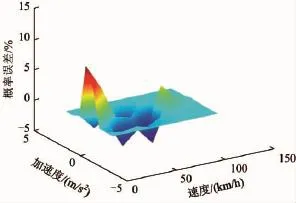
图6 代表性行驶工况与原始数据概率误差速度-加速度联合分布Fig.6 Velocity acceleration combined distribution chart f error between representative driving cycle and overall data
构建的北京市3种车辆代表性行驶工况与其他工况的比较见表9。由表9可知,北京市乘用车和公交车多运行于市区,而市区车流量大、交通较拥堵,因此车辆运行速度较低,怠速、加速、减速比例较高,匀速运行比例较低;北京市客车的运行特点是不仅在市区行驶,也包括郊区及高速路区域,因此交通较通畅,匀速运行比例和平均速度均较高;北京市重型客车行驶工况平均速度要低于FTP75、日本15工况;北京市重型客车怠速模式所占的比例与日本10工况接近,但小于ECE15、日本15工况和上海的行驶工况;北京市重型客车加速和减速模式所占的比例小于FTP75、日本10工况、日本15工况,大于ECE15,与上海市的接近。北京市重型客车匀速行驶模式与ECE15接近,比其他工况值要高。因此,如果基于ECE15或FTP75工况对北京市重型客车排放和油耗进行测试研究,将存在很大偏差。
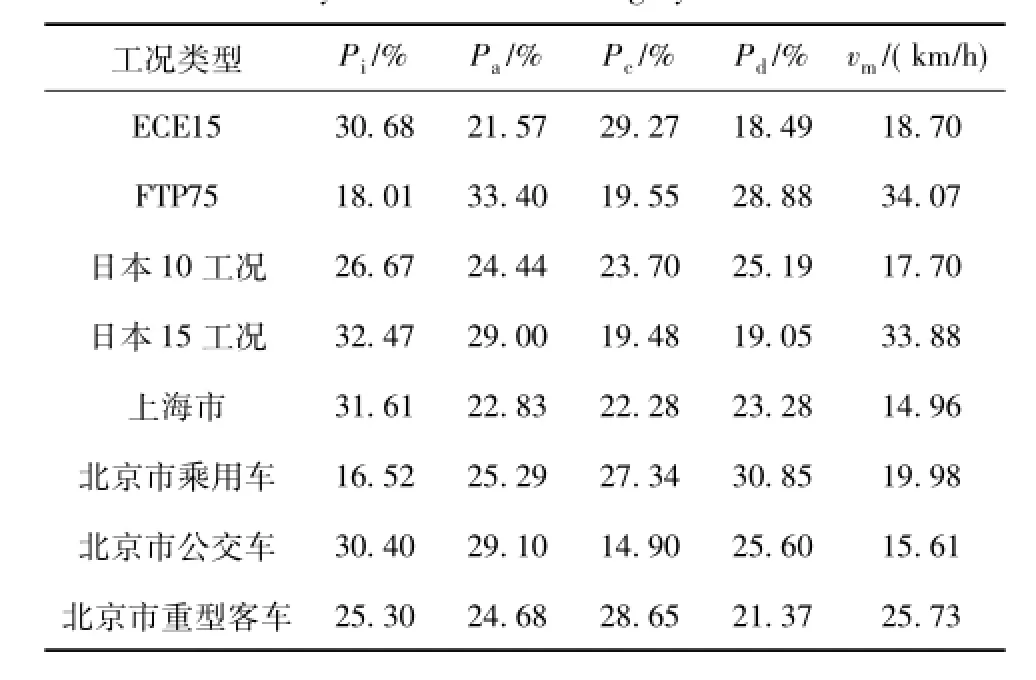
表9 构建的代表性行驶工况与其他工况的比较Table 9 Comparison of the constructed driving cycle and other driving cycles
3 结论
(1)利用小波变换理论进行原始数据的解析与重构,从而减少了各种原因产生的干扰以及原始数据的随机性误差,并保留了车辆实际运行的主要特征与规律,使计算结果更加准确。
(2)计算得到构建的代表性行驶工况与原始数据特征值相对误差,基于对相对误差的速度-加速度联合概率分布分析,表明构建的代表性行驶工况能综合反映北京市的实际道路交通状况。该构建方法方便简单,获得的数据具有良好的精度。
(3)通过与国内外各代表性行驶工况进行对比可知,构建的北京市重型客车行驶工况有怠速时间较短,加减速适中,匀速行驶比例高等特点,与北京市乘用车、公交车行驶工况以及欧洲等发达国家的交通模式相差较大。因此,构建北京市重型客车行驶工况以便于进行重型客车排放和油耗测试是有必要的,并且随着北京市道路建设的不断推进,行驶工况的构建与研究应与时俱进。
[1]朱西产,李孟良,马志雄,等.车辆行驶工况开发方法[J].江苏大学学报:自然科学版,2005,26(2):110-113.
[2]BATA R,YACOUB Y,WANG W G,et al.Heavy duty testing cycles:survey and comparison[R].SAE Technical Paper,1994. doi:10.4271/942263.
[3]ANDRE M,HICKMAN A,HASSEL D.Driving cycles for emission measurements under European conditions[R].SAE Technical Paper,1995.doi:10.4271/950926.
[4]ERICSSONE.Variability in urban driving patterns[J]. Transportation Research,2000,5(5):337-354.
[5]HOLMEN B A,NIEMEIER D A.Characterizing the effects of driver variabilityonreal-worldvehicleemissions[J]. Transportation Research,1998,3(2):117-128.
[6]司康.我国重限型商用车燃油消耗量值法规的发展现状及动向[EB/OL].(2013-12-10).http://www.org/news/201312/69_ 45094.html.
[7]TROCHON E P.A new type of silencers for turbocharger noise control[R].SAE Technical Paper.doi:2001-01-1436.
[8]石琴,郑与波,姜平.基于运动学片段的城市道路行驶工况的研究[J].汽车工程,2011,33(3):256-261.
[9]庞剑,谌刚,何华.汽车噪声与振动:理论与应用[M].北京:北京理工大学出版社,2006:198-203.
[10]石敏.轻型汽车行驶工况构建的研究[D].天津:天津理工大学,2013.
[11]张富兴.城市车辆行驶工况的研究[D].武汉:武汉理工大学,2005.
[12]吴家安.数据压缩技术及应用[M].北京:科学出版社,2010.
[13]范金城,梅长林.数据分析[M].北京:科学出版社,2002.
[14]中国汽车技术研究中心.汽车产业发展常用分析方法与应用[M].青岛:青岛出版社,2013.
[15]石琴,仇多洋,吴靖.基于主成分分析和FCM聚类的行驶工况研究[J].环境科学研究,2012,25(1):70-76.
[16]王军方,丁焰,王爱娟,等.北京市机动车行驶工况研究[J].环境工程技术学报,2012,2(3):240-246.□
Construction and Research of Heavy-Coach's Driving Cycle in Beijing City
YANG Xiao-juan1,2,3,WANG Jian1,2,3
1.School of Transportation Science and Engineering,Beihang University,Beijing 100191,China 2.Beijing Key Laboratory for Cooperative Vehicle Infrastructure Systems and Safety Control,Beijing 100191,China 3.Beijing Key Laboratory for High-efficient Power Transmission and System Control of New Energy Resource Vehicle,Beijing 100191,China
The autonomous drivingmethod was adopted to acquire the driving data of heavy coaches in Beijing city,and the wavelet transform method used to dealwith data under short stroke classification.The self-developed GPS vehicle information management system was used to monitor and collect the driving data of 400 heavy coaches equipped with driving recorders for 2 months.Then the principal components ofmicro tripswere classified through the method of principal component analysis and K clustering technology.The Best Incremental Method and Combined Method were integrated to establish a speed change curve as representative driving cycle.Through the validation of the characteristic parameters and the joint probability distribution of velocity and acceleration,it was shown that the constructed driving cycle could comprehensively reflect the driving characteristics of heavy coaches in Beijing city.By comparison with domestic and international representative driving cycles,it was found that the constructed heavy coach's driving cycle in Beijing city has the characteristic of having short idle time,moderate acceleration and deceleration time,and long uniform driving time,which was very different from the driving cycle of passenger car and public transport in Beijing city and European countries in traffic pattern.This is an importantsupplement to the research of driving cycle of heavy coaches.
driving cycle;autonomous driving method;principal component analysis;clustering analysis;heavy coach
X831
1674-991X(2015)06-0455-09doi:10.3969/j.issn.1674-991X.2015.06.072
2015-06-08
国家自然科学基金项目(91118008)
杨小娟(1991—),女,硕士,主要从事智能车辆研究,yangxiaojuan55@126.com
*责任作者:王建(1974—),男,副教授,博士,主要从事智能车辆研究,wj1974@buaa.edu.cn
