单体半滑行穿浪船船型与静水航行性能
2015-08-24魏成柱毛立夫李英辉易宏
魏成柱,毛立夫,李英辉,易宏
单体半滑行穿浪船船型与静水航行性能
魏成柱,毛立夫,李英辉,易宏
上海交通大学海洋工程国家重点实验室,上海200240
半滑行穿浪船是一种结合了混合式内倾型穿浪船艏和半滑行式水下船体的高速单体穿浪船,同时具有穿浪船的穿浪特性和半滑行船的航行特性,拥有良好的快速性和适航性。半滑行穿浪船采用具有折角设计的压浪型干舷,折角线在船长方向上与水线之间存在夹角。压浪干舷具有抑制内倾型船舶的干舷上浪、提供升力、增加储备浮力和减摇的作用。通过基于动网格的数值计算,对压浪干舷的纵向倾角及优选纵向倾角下的半滑行穿浪船在静水中的航行特性进行研究。计算结果表明:拥有较小纵向倾角的压浪干舷的使用效果较好;半滑行穿浪船同排水型穿浪船相比其在高速段的阻力和姿态得到了很大改善。
半滑行穿浪船;压浪干舷;数值计算;动网格;阻力;姿态
期刊网址:www.ship-research.com
引用格式:魏成柱,毛立夫,李英辉,等.单体半滑行穿浪船船型与静水航行性能[J].中国舰船研究,2015,10(5):16-21.
WEIChengzhu,MAO Lifu,LI Yinghui,et al.Analysis of the hull form and sailing characters in calm water of a semi-planingwave-piercingboat[J].Chinese Journalof Ship Research,2015,10(5):16-21.
0 引言
穿浪船属于高性能船舶。常见的穿浪船型有双体穿浪船和单体穿浪船。双体穿浪船已得到较广泛的应用;单体穿浪船在美国提出DDG 1000后开始得到愈来愈广泛的关注,美国公开了一种内倾穿浪船型供学术研究使用[1-3]。将内倾式船艏应用于高速快艇可得到单体穿浪快艇。内倾式单体高速穿浪船采用内倾式船艏,可以穿浪而行,避免了传统滑行艇在波浪中航行时的跳跃和砰击问题,具有良好的适航性。研究人员对一种排水型单体高速穿浪船进行了研究,发现其具有良好的快速性和耐波性,但由于受制于其排水型船舶的固有缺点,其快速性相对于一些滑行艇在高速段存在一定差距。此外,排水型船在很高航速时航行姿态也会发生很大改变。在排水型船和滑行艇之间存在着过渡船型,为半滑行船。半滑行船船重由静升力和动升力同时提供。半滑行船相对于滑行艇其耐波性有很大的提高,相对于排水型船其在高速段具有明显的优势。半滑行船近年来也得到了关注和应用,GILES[4]对一种半滑行船的设计在全球范围申请了专利,美国海军濒海战斗舰LCS 1采用了半滑行设计。考虑到穿浪船和半滑行船各自的优点,半滑行穿浪船将穿浪型船艏同半滑行船体相结合,兼具穿浪船和滑行艇的优势,改善了船舶的快速性和适航性,及其高速下的航行姿态。图1给出了一种半滑行式穿浪船的概念设计。由图1可以看到该半滑行穿浪船的透视效果、侧视轮廓和典型位置处的横剖线,其中X为剖面距船艉的距离,L为水线长。该船型的主船体为细长体结构,使用了改进后的具有穿浪及隐身特性的混合式内倾型穿浪船艏和半滑行式的水下船体。半滑行式主船体使得该船型在高速航行时船体能够获得平稳抬升。干舷采用了内倾和压浪式设计,有利于减小内倾船型所面临的淹湿问题,减小兴波,提供额外的动升力,并提高舱容和稳性。压浪干舷和水线存在夹角α。将压浪干舷在纵向的倾角α定义为干舷折角线在中纵剖面上的投影同水线的夹角(锐角)。本文将研究该夹角α的改变对半滑行穿浪船在高速时的航行特征的影响。夹角α的改变方式为保持折角线在船艉端点的坐标值不变,以折角线的尾部端点为圆心改变角α的值。
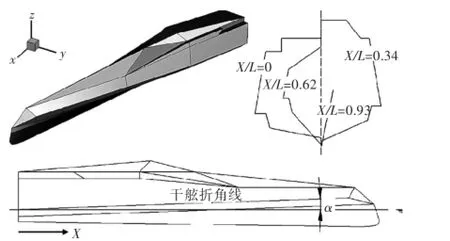
图1 半滑行穿浪船透视图和轮廓图Fig.1 Perspective and profile ofa semi-planing wave-piercing boat
船型研究常用的方法包括模型试验和数值计算。数值计算又有基于势流和基于粘性流的2个分支。基于势流理论的方法计算快,所得的结果也比较合理。文献[5]将改进的Noblesse新细长船理论与Svaitsky法结合,得到了半滑行船兴波阻力的计算方法。基于粘性流理论可以近似地模拟流场的真实流动,尤其当速度较高时,需要计入粘性的影响。以滑行艇为代表的一些高速船舶在高速航行时,航行阻力以摩擦阻力(粘性阻力)占据主要比重。此外,由于穿浪船的设计特点不同于传统船型,需要考虑干舷内倾带来的影响,故使用粘性流计算可以获得更丰富的结果。
此外,高速船静止和航行时的姿态改变较大,因此粘性流计算中通常采用固定模型的计算模式,不能很好地反应实际情况,甚至还会给出错误的预报。在预报船体航行姿态上,数值计算中最有效的方法是使用动网格模型[6]。
综上所述,通过使用基于粘性流和动网格的数值计算,本文将阐述半滑行穿浪船压浪干舷的纵向倾角α改变所产生的作用和效果;在通过计算获取适宜的压浪干舷的纵向倾角α之后,对拥有该角度的半滑行穿浪船在若干速度点下进行计算来探索半滑行穿浪船在静水中的阻力、姿态和兴波特性。
1 计算方案及试验验证
在粘性流理论中,对Navier-Stokes方程进行平均,可得到雷诺平均的 Navier-Stokes方程(RANS方程),为了封闭RANS方程组,须对雷诺应力张量进行模拟,因而产生了较多的湍流模型。SST k-ω模型是在船舶行业应用较多的湍流模型,在近壁面处使用k-ω模型,其他区域使用k-ε模型。对于该模型的详细介绍可参见文献[7],这里,选择SST k-ω模型来进行计算。
对于自由面的捕捉方法有LSM(Level Set Methods)和流行的VOF(Volume of Fluid)[8],在本次讨论中,自由面的获取是通过使用VOF模型,并设定水的体积分数为0.5。
船体运动为六自由度运动,包括垂荡、横荡、纵荡、横摇、纵摇及艏摇。船舶航行在静水中会有纵摇(稳态为艏艉倾)及垂荡(稳态为升沉),而在波浪中则会有六个自由度的运动。船舶在低速时的绕流计算可以不考虑船体运动就能获得很准确的阻力值及兴波结果;但是在狭窄水道和有限水深条件下,船舶在低速航行时仍然会产生升沉等运动[9]。高速船在静水中高速航行时会存在较大的垂向及纵向运动,航行姿态同静止状态差别很大。因此,在数值计算中需考虑船舶航行姿态改变对预报结果带来的影响。
在数值计算中,船舶运动作为刚体运动来处理,分为平动和转动,运动方程如下:
船体旋转运动通过体坐标系求得:

式中:I为转动惯量;MH为作用在船体上的力矩向量;ωH为角速度向量。
力矩通过式(3)由惯性坐标系转换至体坐标系:

其中,H为如下矩阵:

角φ,θ和ψ为分别对应于x,y,z轴的旋转角度。
为适应船体的运动,需要使用动网格来进行计算。最直接的方式是使船模曲面运动,配合弹簧光顺法和局部网格重构。但这种方法的缺点是,对复杂模型进行网格重构时会出现负体积的网格,导致计算失败,而且网格重构也会产生额外的计算时间。另一种方法是将边界层网格作为一个区域或者将边界层网格及附近部分网格随船模曲面一起运动,配合以弹性光顺法,该方法对模型随体网格没有影响,有利于加入并保有边界层网格。本文采用网格随体运动的方法,随体区域(Dynamic zone)采用四面体网格和边界层网格来适应船体复杂的曲面,静止区域(Stationary zone)使用六面体网格。计算域设置如图2所示。

图2 计算域设置Fig.2 Computationaldomain settings
为验证计算方法的可靠性和有效性,将某排水型高速单体穿浪船的基于该方法的计算结果与水池试验结果进行了对比,结果表明该方法能够满足船型性能预测的要求(图3)。本文中,阻力、纵倾(艉倾为正)、升沉(向上为正)分别用Drag,Trim和Sinkage表示,并对结果进行无因次化处理。图3中的计算结果用cal标记,试验结果用exp标记。
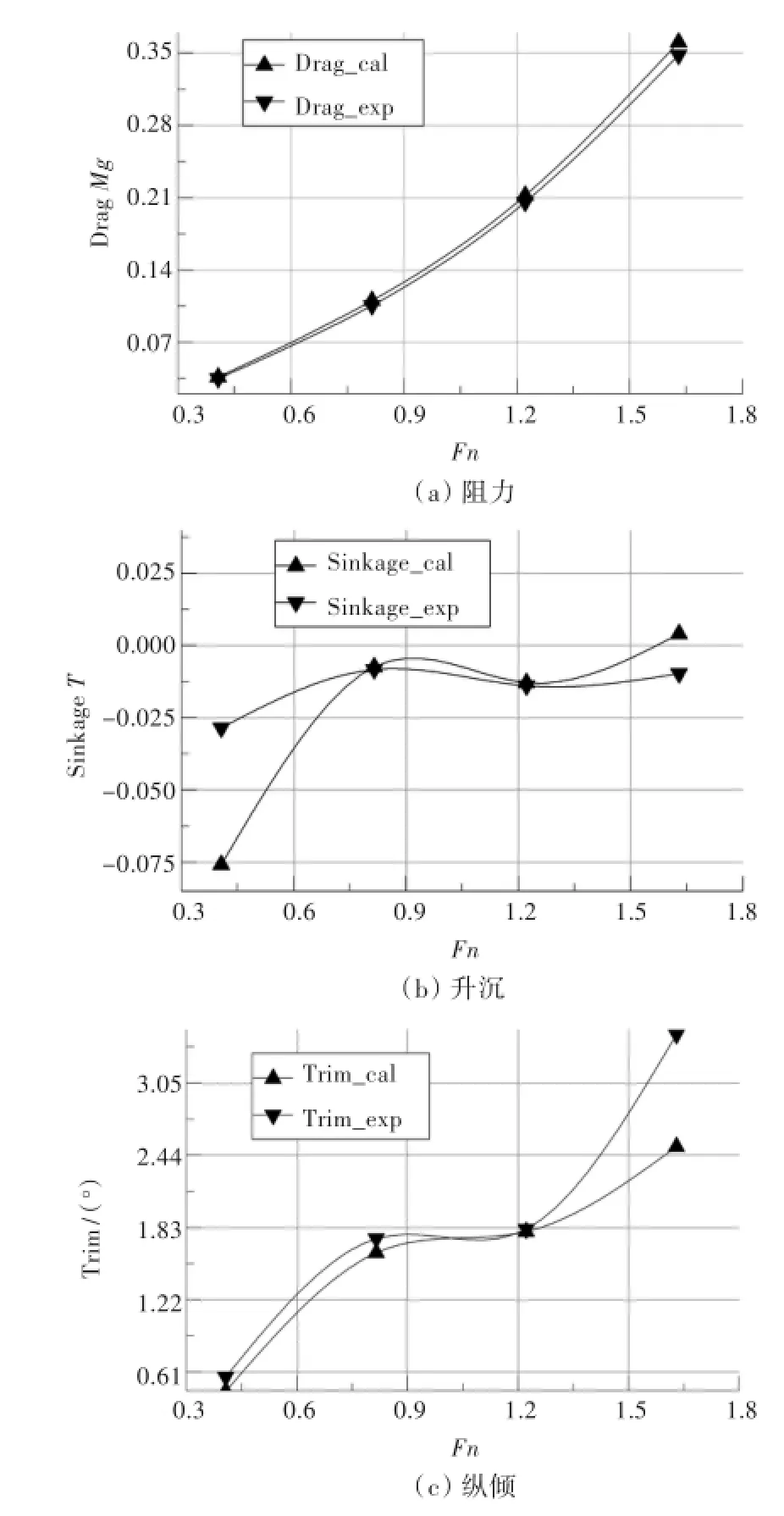
图3 计算方法验证Fig.3 Experimentalvalidation of the calculationmethod
本次计算使用了1.50°,2.00°及2.67°这3个角度进行对比。在改变压浪干舷的同时,水线以下的船体保持不变,干舷折角线同水线之间干舷在保证外飘角不变的情况下随α的增加向水线以上自然延伸。图4所示为干舷折角线变化及其变化对船体形状的影响。由于半滑行穿浪船是一种高速艇,因此将计算的速度节点设定为8.4 m/s,对应的傅汝德数Fn=1.63。计算中所用到模型的主尺度如表1所示。
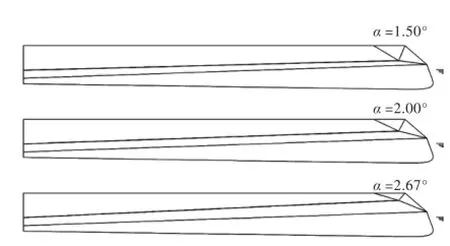
图4 不同倾角的压浪干舷Fig.4 Anti-wave freeboardswith differentα
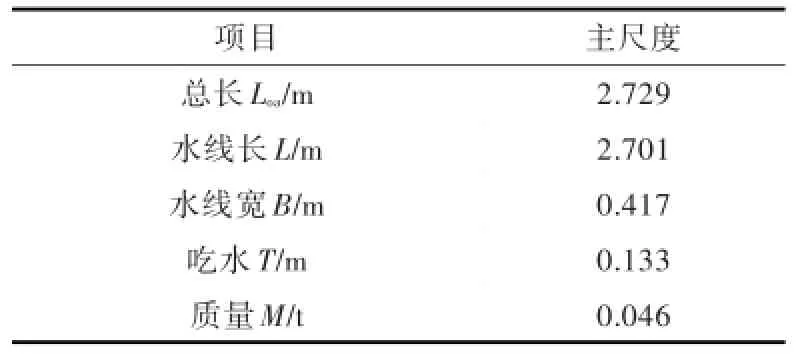
表1 计算模型主尺度Tab.1 Principal dimensionsof the hu ll
在通过计算获取合适的纵倾倾角后,将对该纵倾角下的半滑行穿浪船在Fn=0.41,0.82,1.22,1.63,2.04时的静水航行特性进行计算。
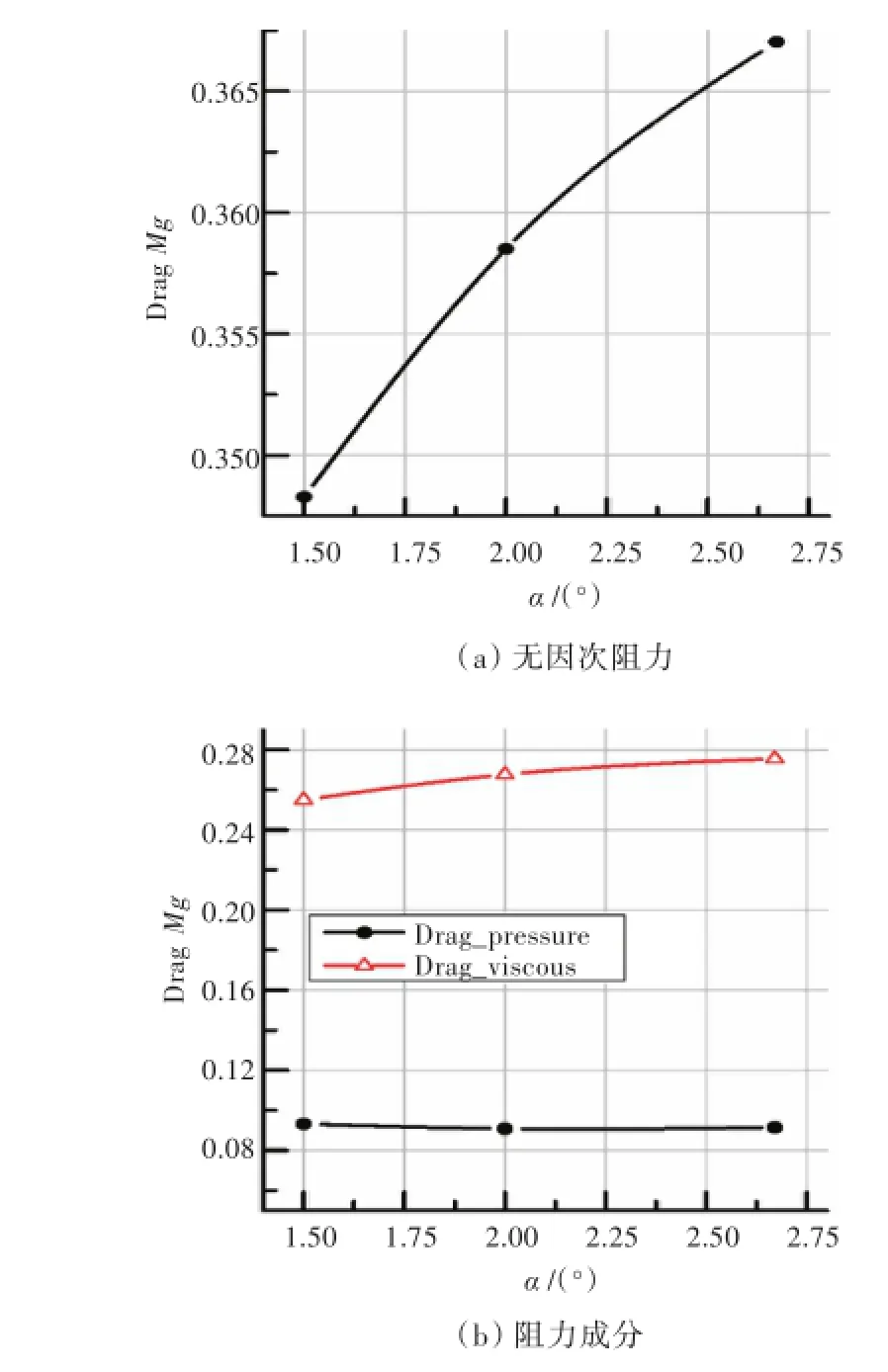
图5 无因次阻力及阻力成分随α变化的曲线Fig.5 Drag and drag componentcurveswithα
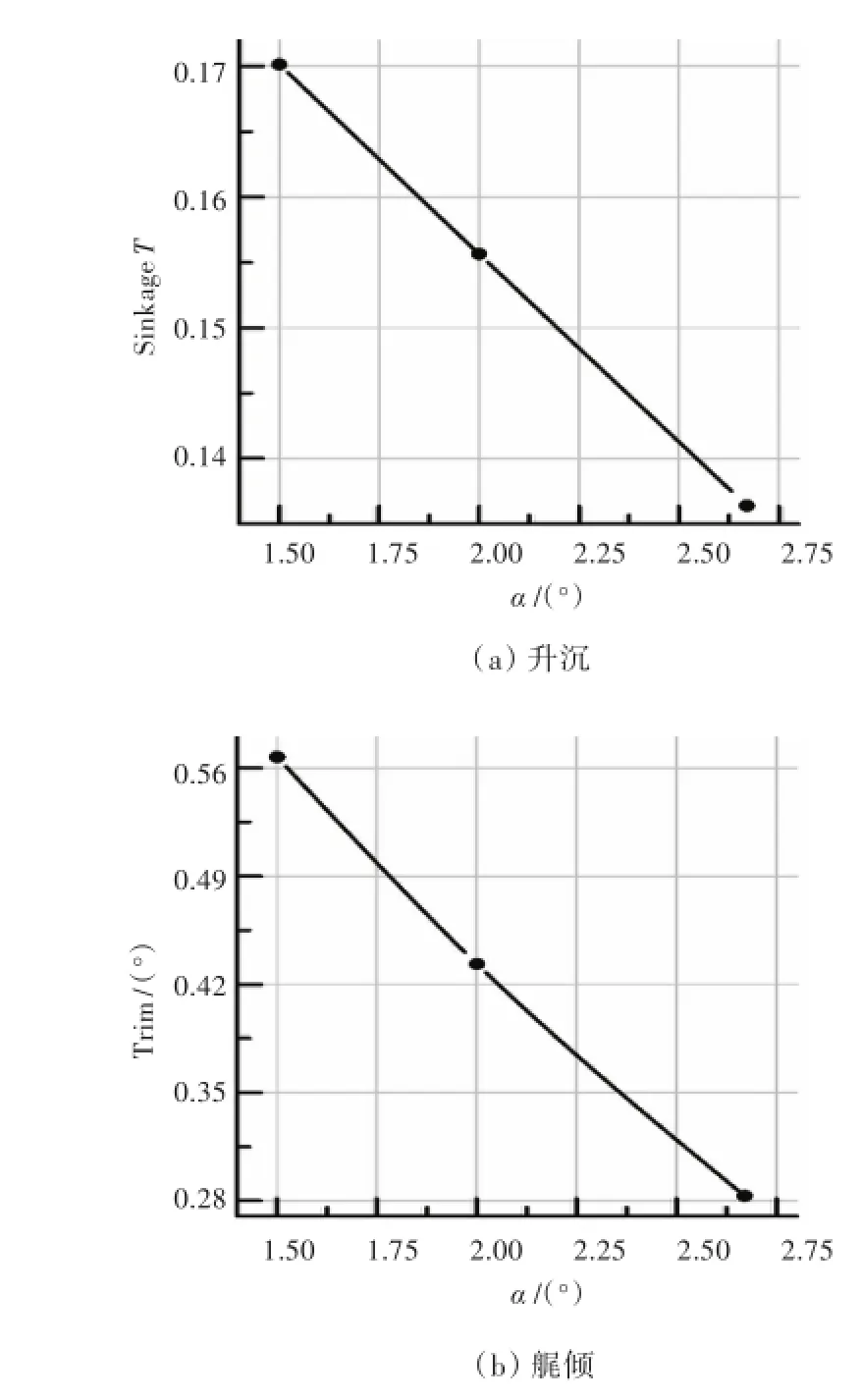
图6 船体姿态随α变化的曲线Fig.6 Hullgesture curveswithα
2 压浪干舷纵向倾角
某一船体特征的变化对船体性能的影响主要表现在静水阻力、航行姿态、兴波和耐波性上。由于本研究是基于静水环境计算,因此对压浪干舷纵向倾角α变化所带来的影响将从阻力、姿态和兴波3个方面进行阐述。
由图5可以看出,压浪干舷纵向倾角α对半滑行穿浪船的阻力影响显著,船体阻力随着α的减小而减小。船体阻力在 α=2.67°时比在 α= 1.50°时增加了5.38%。此外,由图5(a)可知α变化对阻力产生的作用是非线性的。经分析船体在不同α下的阻力成分可知,较小的α可以减小船体的粘性阻力(Drag_viscous),即摩擦阻力。图5(b)给出了不同 α下的粘性阻力和压阻力(Drag_pressure)曲线。
由于使用了动网格,α的改变对航行姿态的影响也得以在计算结果中体现。如图6所示,随着α的增加,船体向上抬升减小,船体艉倾减小。船体升沉和艉倾没有随着干舷攻角的增加而增加,反而随之减小。相较于 α=2.67°时,在α= 1.50°时船体向上抬升增加明显,增加百分比为19.8%,船体艉倾角几乎翻倍。但是由于升沉和艉倾值其本身仍为小值,故船体在整个角度范围内仍然具有优异的航行姿态。经过分析,当干舷的α较小时,其更接近水面,因而压浪干舷产生的升力更大,故α较小时船体会获取更大的抬升力,进而船体抬升和艉倾会增加。
由图7可知,α的改变对船体整体兴波带来的影响微小,船体远场波形几乎未发生改变。
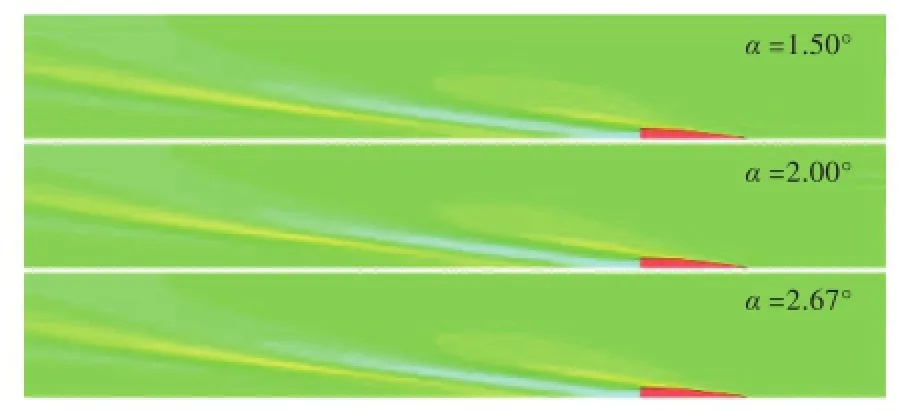
图7 不同角α下的船体兴波Fig.7 Wavemaking at differentα
为了观察α的改变带来的影响,将船体周围的局部兴波单独放大显示,如图8(a)及图8(b)所示。由图8(a)及图8(b)可以发现,α较小的压浪干舷将干舷上浪压得更低,压浪效果更好,且其船艉附近的兴波也更小;随着α的减小,鸡尾流向船后发展。图8(c)给出了不同α下的船体表面淹湿情况。由图8(c)可以发现,压浪干舷对船体上浪和淹湿起到了很好的抑制作用;α对船体表面淹湿的影响是很明显的,α越小,压浪干舷越接近静水面,船体干舷淹湿面积越小。较小的α对应较小的船体淹湿面积,这也解释了上文中船体粘性阻力随α减小而减小的现象。
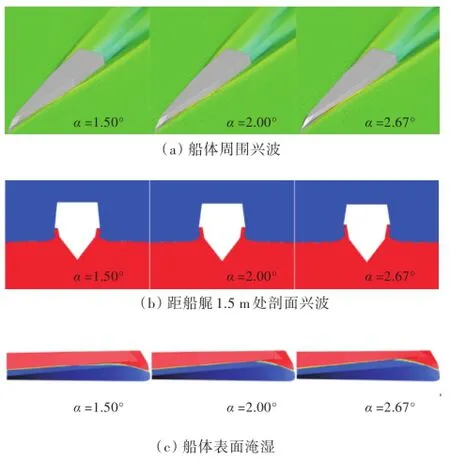
图8 不同角α下的船体周围兴波及淹湿Fig.8 Wavemaking around the hull and submergence atdifferentα
3 静水航行特性
通过上文的对比分析,选取α=1.50°作为进一步计算所用模型的干舷纵向倾角。为了更好地揭示半滑行穿浪船的特性,将计算所得的半滑行穿浪船的结果同上文中某排水型高速单体穿浪船的试验结果进行了对比,由于二者的排水量几乎相同,故使用长度傅汝德数Fn作为速度参量。
单体半滑行穿浪船同单体排水型穿浪船相比,排水型船在中、低速段具有优势,随着航速的提高,半滑行船型的快速性优势明显,如图9所示。图中,半滑行穿浪船的计算结果用Cal标记,排水型穿浪船的试验结果用Exp标记。
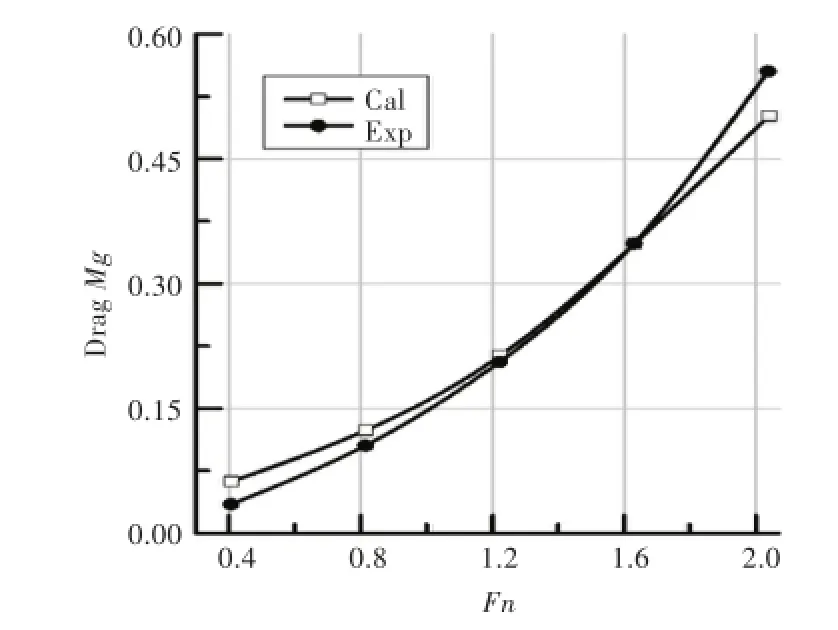
图9 阻力对比Fig.9 Comparison of drags
如图10所示,半滑行穿浪船和排水型穿浪船的航行姿态具有明显的差异。半滑行穿浪船在整个计算航速段的艉倾非常小,依靠动升力来较大地抬升船体,减小湿表面积,进而减小摩擦阻力,而排水型穿浪船的姿态则完全相反。从耐波性和适航性考虑,船体应避免较大的艉倾。由于半滑行穿浪船的船艏大部分仍在水中,同时考虑到穿浪型船的穿浪能力,因此半滑行穿浪船在遭遇波浪时的砰击问题会得到很大改善,因此其在高速下的适航性更佳。
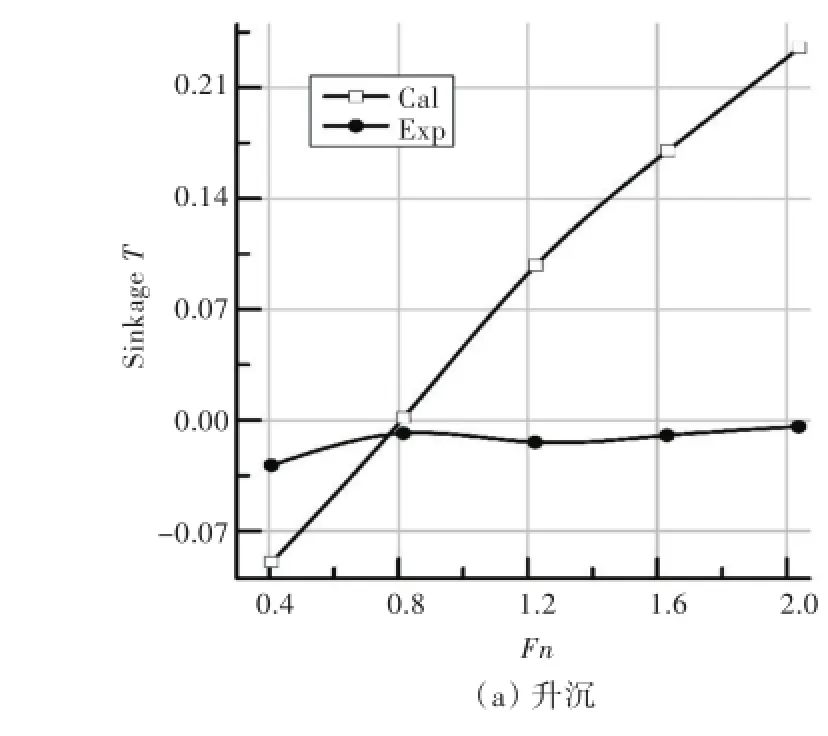
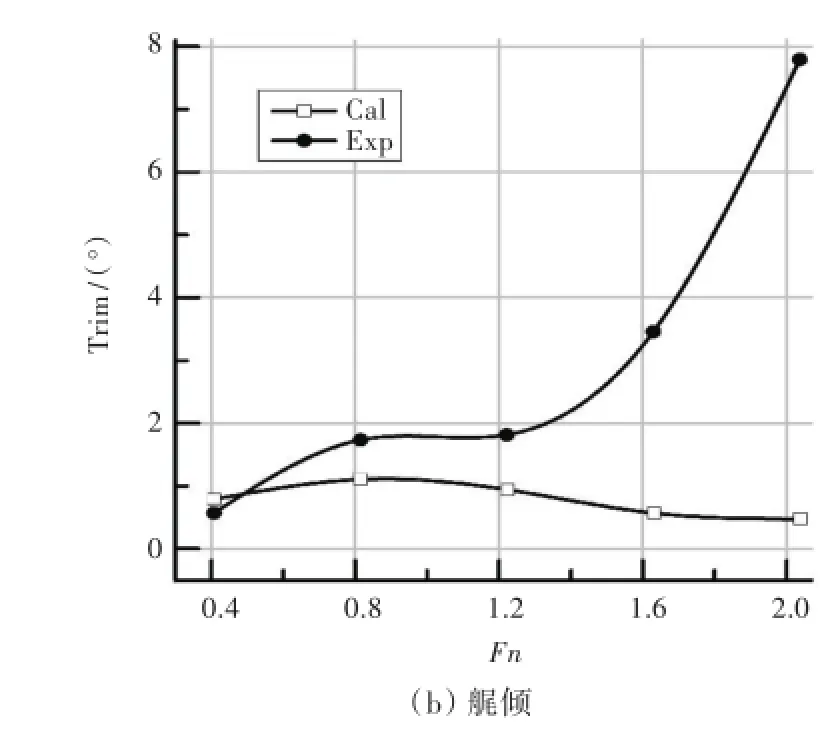
图10 船体姿态对比Fig.10 Comparison of hull gesture
由图11可知,半滑行穿浪船的船体周围兴波非常小,船体兴波主要集中在船艉。随着航速的提高,由于压浪干舷的作用,其艉部的飞溅也更加明显。同时由于压浪干舷的作用,船体淹湿被控制在干舷折角线以下。
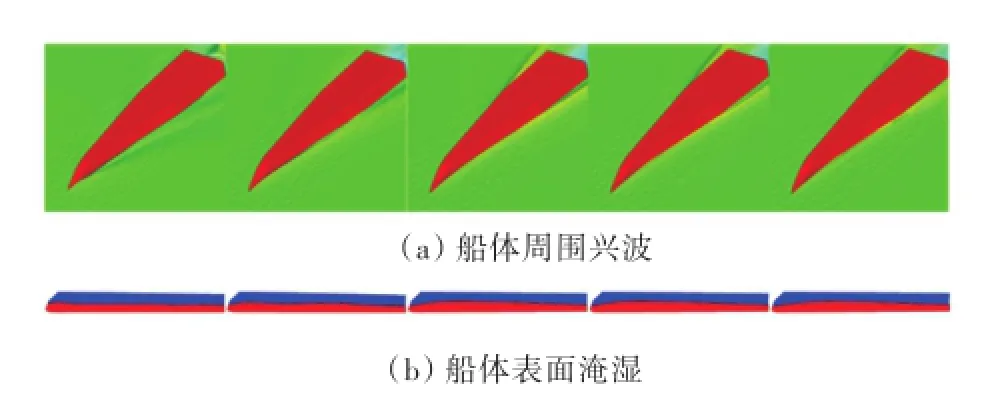
图11 不同速度下的船体周围兴波及表面淹湿Fig.11 Wavemaking around the hull and submergence
4 结论
压浪干舷纵向倾角α的改变给半滑行穿浪船所带来的影响如下:
1)随着α的减小,半滑行穿浪船的艉倾和抬升增加,船体表面淹湿减小,摩擦阻力也减小,船体总阻力减小。
2)压浪干舷可以很好地控制船体上浪和淹湿。
3)α的改变对船体纵倾和升沉的影响在相对值上较大,但由于半滑行穿浪船的纵倾和升沉的绝对值较小,因而α的改变对其航行姿态影响不会很剧烈。
半滑行穿浪船同排水型穿浪船相比,其在高速下的阻力和航行姿态得到很大改善,其在波浪中应有良好的适航性;船体周围兴波小;压浪干舷可以在整个航速段很好地控制船体淹湿和上浪。
本次研究的压浪干舷为直线型结构,有纵向弧度的压浪干舷还有待研究。此外,压浪干舷角度变化对船体在波浪中航行的影响及半滑行穿浪船在波浪中的性能特征还有待在将来进行更深入的研究。
[1] HASHIMOTO H.Pure lossof stability of a tumblehome hull in following seas[C]//Proceedings of the 19th International Offshore and Polar Engineering Conference. Osaka,Japan,2009:626-631.
[2] BASSLER C C,CARNEAL J B,ATSAVAPRANEE P.Experimental investigation of hydrodynam ic coefficients of a wave-piercing tumblehome hull form[C]// ASME 2007 26th International Conference on Offshore Mechanics and Arctic Engineering.San Diego,CA,2007:537-548.
[3] BASSLER C,PETERSA,CAMPBELL B,et al.Dynamic stability of flared and tumblehome hull forms in waves[C]//Proceedingsof 9th International Ship StabilityWorkshop.Hamburg,Germany,2007:1-14.
[4]GILESD L.Monohull fast ship:U.S.Patent 5129343[P].1992-07-14.
[5]龚凯.半滑行船兴波阻力计算方法探讨[D].哈尔滨:哈尔滨工程大学,2003.
[6] 倪崇本.基于CFD的船舶阻力性能综合研究[D].上海:上海交通大学,2011.
[7]MENTER F R.Two-equation eddy-viscosity turbulence models for engineering app lications[J].AIAA Journal,1994,32(8):1598-1605.
[8]HIRT CW,NICHOLSB D.Volume of fluid(VOF)method for the dynamics of free boundaries[J].Journal of Computational Physics,1981,39(1):201-225.
[9]MILLWARD A.A prelim inary design method for the prediction of squat in shallow water[J].Marine Technology,1990,27(1):10-19.
[责任编辑:喻菁]
Analysisof the hu ll form and sailing characters in calm water of a sem i-p laning wave-piercing boat
WEIChengzhu,MAO Lifu,LIYinghui,YIHong
State Key Laboratory ofMarine Engineering,Shanghai Jiao Tong University,Shanghai200240,China
In this paper,a semi-planing wave-piercing boat combining a hybrid tumblehome bow and a semi-planing hull,which has the features of both a wave-piercing boat and a semi-planing boat,is proposed to achieve the abilities of cutting through waves and decent speed.The semi-planing wave-piercing boat's freeboard has knuck les and is designed as anti-submergence.The freeboard could control submergence faced by a tumblehome bow,producing positive lift and extra reserve buoyancy,and imp roves the roll.The longitudinalangle of the anti-submergence freeboard is analyzed,and the boat's sailing characters in calm waterwith a chosen angle are calculated in a numericalway with dynamicmesh.The results show that anti-submergence freeboard works betterwith small longitudinalangles,and the boat has smaller drag and better hull gesture athigh speed compared to a high-speed displacementwave-piercing boat.
semi-planing wave-piercing boat;anti-submergence freeboard;numerical calculation;dynamicmesh;drag;gesture
U661.3
ADO I:10.3969/j.issn.1673-3185.2015.05.003
2014-12-26网络出版时间:2015-10-8 11∶12
上海交通大学海洋工程国家重点实验室研究项目资助(GKZD010061)
魏成柱,男,1987年生,博士生。研究方向:新型船舶开发与数值计算。E-mail:weichengzhu@sjtu.edu.cn
李英辉(通信作者),男,1973年生,博士,讲师。研究方向:新型船舶开发和数值计算。E-mail:liyinghui@sjtu.edu.cn
易宏,男,1962年生,教授,博士生导师。研究方向:潜水器与特种船舶开发研究,海上装置与系统开发设计研究,系统可靠性与人因工程研究
网络出版地址:http∶//www.cnki.net/kcms/detail/42.1755.TJ.20151008.1112.030.htm l
