机器人结直肠癌手术专家共识(2015)
2015-08-23中国医师协会外科医师分会结直肠外科医师委员会中国研究型医院学会机器人与腹腔镜外科专业委员会
中国医师协会外科医师分会结直肠外科医师委员会 中国研究型医院学会机器人与腹腔镜外科专业委员会
·指南与共识·
机器人结直肠癌手术专家共识(2015)
中国医师协会外科医师分会结直肠外科医师委员会 中国研究型医院学会机器人与腹腔镜外科专业委员会
结肠肿瘤; 直肠肿瘤; 机器人手术系统; 共识
我国机器人结直肠癌手术尚处于起步阶段。编撰《机器人结直肠癌手术专家共识》,希望能对目前正在或将要开展机器人结直肠癌手术的同道起到一定的指导和参考作用。
一、手术机器人的特点与优势
(一)技术特点
手术机器人系统由视频系统、机械臂系统和医师控制台3部分组成。视频系统为主刀医师提供放大10至15倍的高清三维图像,赋予手术视野真实的深度感,增加医师对手术的把握。机械臂系统位于床旁,安装有1条镜头臂和3条器械臂。器械臂所持专用器械具有独特的可转腕结构,可以540°旋转,突破了双手的动作限制,使操作更灵活,尤为适合狭小空间内的手术。主刀医师坐于控制台前,实时同步控制床旁机械臂的全部动作,无需长时间站立,显著降低了生理疲劳[1-3]。机器人计算机系统自动滤除术者动作中的不自主颤动,使操作更稳定。
除了上述优点,手术机器人系统仍需改进:缩短机器人连接安装时间;镜头臂和器械臂可以转换使用;缩小机械臂体积、扩大机械臂活动范围;增加机械臂力反馈功能;降低设备耗材及维护费用等。
(二)临床应用
机器人直肠癌、乙状结肠癌手术技术已较为成熟。大量回顾性研究、荟萃分析和少数小样本随机对照临床试验显示[4-11],机器人直肠癌手术的优势主要在于:更为精细的手术操作;更为精确与流畅的直肠分离,可转向器械更易克服直杆器械在低位直肠侧方间隙游离中的“相对死角”,保障系膜的完整切除;更快的术后胃肠道功能恢复;更好的保护盆腔自主神经功能(排尿功能、性功能等);更少的术中出血,和腹腔镜相比更低的中转开腹率,相似的术后并发症发生率与住院时间。在肿瘤根治方面,机器人手术的淋巴结检出率、远端切缘阳性率、局部复发率和长期生存率与腹腔镜和开放手术相似,在降低环周切缘阳性率方面具有潜在的优势[5,7]。
机器人右半结肠癌手术技术尚在发展。回顾性研究和荟萃分析显示[12,13],机器人右半结肠癌手术具有更快的胃肠道功能恢复,更少的术中出血,和腹腔镜相比相似的中转开腹率,相似的术后并发症发生率与住院时间。在肿瘤根治方面,机器人手术的淋巴结检出率和切缘阳性率与腹腔镜和开放手术相似。目前尚缺乏机器人右半结肠癌根治术后长期生存方面的报道。结肠其它部位(横结肠左半、结肠脾曲、降结肠)肠癌的机器人手术目前报道较少,优势有待进一步评估。
二、机器人结直肠癌手术适应证与禁忌证
手术适应证与传统腹腔镜手术类似。
手术禁忌证:(1)不能耐受全麻下手术者,如严重的心、肺、肝等主要脏器功能不全;(2)严重凝血功能障碍;(3)妊娠期患者;(4)腹盆腔内广泛转移、机器人系统下清扫困难;(5)结直肠癌梗阻伴有明显腹胀;(6)肿瘤穿孔合并急性腹膜炎;(7)腹腔广泛严重粘连等导致不能进行穿刺;(8)身体衰竭,大量腹水、内出血或休克;(9)BMI>40 kg/m2的重度肥胖者(目前尚无加长的机器人穿刺器及手术器械)
三、围手术期准备
(一)患者准备
包括术前肠道准备,麻醉诱导期预防性应用抗生素等。麻醉方式宜采用气管内插管全身麻醉,并留置导尿,必要时放置鼻胃管。其它术前准备按常规进行。
(二)器械准备
1.器械臂使用专门设计的配套器械;如有助手参与手术,可使用传统腹腔镜器械。2.器械臂所持器械:有多种选择,如热剪(单极电剪)、电钩、超声刀、无损伤抓钳、带双极电凝的无损伤抓钳、带双极电凝的马里兰抓钳、抓持牵开器等。3.助手所持器械:主要有腹腔镜无损伤肠钳、剪刀、冲洗吸引器、5 mm结扎速(Ligasure V)、Hemo-lock钳、施夹钳、直线切割吻合器。4.开放吻合所用器械:切口保护器、管型吻合器。5.机械臂专用的一次性无菌套。
(三)机器人准备
1.机器人系统开机自检。2.检查器械是否齐全,功能是否良好。应特别注意检查机械臂运动是否灵活,专用器械的可转腕有无活动受限,剪刀、抓钳等是否正常开合。3.机械臂安装专用的一次性无菌套。4.机器人专用镜头连接光源,白平衡,对焦以及三维校准确认后,应在热水(不宜超过55℃)中加温,防止起雾。5.注意调整手术台四周及上方设备,妥善固定各设备供电传输线路,避免影响机械臂运动。6.若在手术过程中发生机械臂的活动相互磕碰,可以及时地对机械臂位置进行适当的调整。7.主刀医师可以通过调整控制台上的屏幕显示,调整主操控台的目镜高低和倾斜角度、手臂支撑架的高度。
四、机器人结直肠癌手术步骤
(一)机器人直肠、乙状结肠癌根治术
用于治疗直肠及乙状结肠肿瘤。主要包括乙状结肠癌根治术,直肠癌的前切除术,低位前切除术和经腹会阴联合切除术。
1.体位
行乙状结肠癌根治术,直肠前切除术和低位直肠前切除术的患者,放置剪刀位或改良截石位[14]。对于低位直肠癌行经腹会阴联合直肠癌根治术的患者,放置截石位。患者固定后,调整手术床为头低脚高,右倾。适当降低患者左腿高度,防止与机械臂碰撞。
2.Trocar数量和位置
手术常用4~5枚Trocar:镜头孔C,机械臂操作孔R1、R2、R3,辅助孔A。若需游离脾曲,则需将机械臂操作孔R2更改为机械臂操作孔R4。详见图1。
(1)镜头孔C:12 mm口径,置于脐右上方3~4 cm处。(2)机械臂操作孔R1:8 mm口径,置于右侧麦氏点,即脐与右髂前上棘连线外1/3处。(3)机械臂操作孔R2:8 mm口径,置于左锁骨中线,平镜头孔处。(4)机械臂操作孔R3:8 mm口径,置于左腋前线,平镜头孔处,多用于辅助低位直肠的分离。(5)机械臂操作孔R4(游离脾曲用):8 mm口径,置于剑突下方3~4 cm,中线和右锁骨中线中间处。(6)辅助孔A:5 mm/12 mm口径,置于过机械臂操作孔R1的垂线,平镜头孔处。
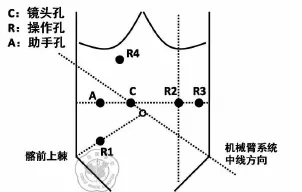
图1 机器人直肠、乙状结肠癌根治术Trocar位置
镜头孔的位置相对固定,其余Trocar位置依据肿瘤部位、患者体型及术者习惯进行调整,注意保持操作中心在肿瘤部位。相邻Trocar间距8~10 cm,避免机械臂交叉磕碰。所有尺寸均应以气腹后有张力的情况下为准。游离直肠和乙状结肠时使用操作孔R1、R2和(或)R3;游离脾曲时使用操作孔R1、R4和(或)R3。
3.腹腔探查
建立气腹。气腹压力8~15 mmHg。可使用腹腔镜或机器人镜头进行腹腔探查。探查中若发现有影响Trocar安放的组织粘连,必须先使用腹腔镜器械进行松解,并调整体位,充分显露手术部位,明确机器人手术可行后,再连接机器人。
4.机器人连接
机械臂系统安置于患者左侧,中线与镜头孔C和左髂前上棘的连线重合,详见图1,图2。各机械臂采取“环抱”姿态:镜头臂居中,双侧器械臂关节向外充分伸展,器械臂上数字应正对前方,以免交叉磕碰。机械臂与Trocar连接时注意高度调整,动作柔和,避免向上提拉Trocar。机械臂固定后,不可再移动患者体位或手术床。
5.手术步骤
(1)显露术区:建议采用中间入路手术。女性患者可使用机器人行子宫悬吊,男性患者也可悬吊膀胱表面腹膜改善手术视野。助手在辅助孔用无损伤肠钳将小肠、大网膜移动至右上腹。向上外侧牵拉直乙结肠与后腹膜交界的肠系膜,辨认腹主动脉分叉处。(2)分离血管:于骶岬水平为始,沿脏层腹膜与壁层腹膜间隙向上剥离肠系膜,裸化肠系膜下动静脉,清扫淋巴结。先后于根部Hemo-lock夹闭并切断动静脉。(3)游离侧腹膜:将乙状结肠向右侧牵开,在此游离脏层腹膜与壁层腹膜间隙向外侧分离,注意避免损伤输尿管。(4)游离脾曲:若需游离脾曲,则需要先撤离机械臂,改变机械臂系统位置,更换操作孔,重新连接机械臂,详见图3。机械臂系统的中线过镜头位置,与左肩成15°角。使用操作孔R1、R4游离脾曲。对乙状结肠较短术前评估需要行脾曲游离的患者,也可先行脾曲游离,再更换机械臂位置行直肠游离,以方便一次性完成吻合。(5)游离降结肠和乙状结肠:沿肾前筋膜与输尿管上方水平游离降结肠及乙状结肠,注意保护神经,防止损伤。根据肿瘤部位同时可以裁剪肠系膜,确定近端切缘。(6)游离直肠:直肠的游离从骶前开始,以椭圆形的分离模式进行TME分离,注意层次,从后壁中央开始,逐步向两侧进行分离,最后分离直肠前壁。在一些肥胖骨盆狭小病例,也常在前后间隙均分离明确后再行侧方间隙分离。机械臂R3可辅助进行直肠的牵拉暴露。注意机械臂牵拉张力的控制,避免软组织撕脱。根据肿瘤所在位置决定是否打开腹膜返折及游离直肠的长度,必要时可分离直至肛提肌水平,低位游离电剪或电钩可能更灵活。(7)游离直肠远切端:直肠远切端可使用超声刀进行肠壁的裸化,也可使用机器人的电钩或热剪进行裸化。切缘距离肿瘤下缘常规2 cm以上。(8)吻合:根据肿瘤位置及患者体型选择开放或腹腔内吻合。开放吻合在左下腹做切口,将标本拖出,直视下进行吻合;必要时可加缝加固。腹腔内吻合在裸化远端肠管后切断;左下腹小切口或扩大现有操作孔取出标本;近端肠管置入吻合器头;还纳近端肠管,缝闭或用巾钳夹闭切口,重新建立气腹,吻合器从肛门置入,机器人直视下进行吻合。若肿瘤较小,可从肛门拖出肠管切断,将吻合器头固定在近端肠管塞回至腹腔,或通过其他方法置入吻合器头后固定在肠管近端,机器人直视下吻合。充气试验或美兰注入试验检查吻合是否满意,必要时可机器人直视下加缝加固。(9)会阴部手术和造口:行经腹会阴联合直肠癌根治术的患者,直肠游离至肛提肌水平后,医师手工进行会阴部手术,手术方法和传统开放手术相同。肿瘤标本从会阴部取出。同时撤离机械臂,移开机械臂系统,医师手工进行造口。会阴部手术和造口完毕,关闭会阴部切口。(10)关闭切口:必要时可重新建立气腹,连接机械臂,行机器人关闭盆底腹膜。适当冲洗(生理盐水或蒸馏水),放置引流,关闭切口。
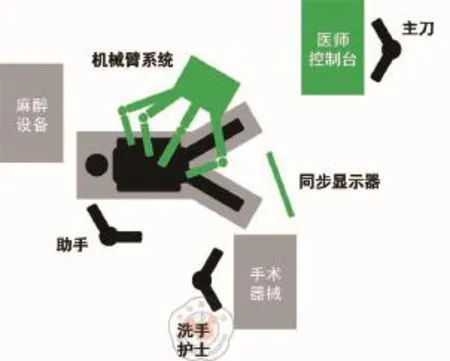
图2 机器人直肠、乙状结肠癌根治术手术室布置
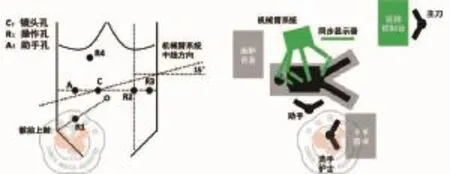
图3 机器人直肠、乙状结肠癌根治术游离脾曲时机械臂系统位置
(二)机器人左半结肠癌根治术
用于治疗横结肠左半、结肠脾曲、降结肠的肿瘤。
1.体位
患者放置剪刀位或改良截石位[14]。患者固定后,调整手术床为头高脚低,右倾。适当降低患者左腿高度,防止与机械臂碰撞。
2.Trocar数量和位置
手术常用5枚Trocar:镜头孔C,机械臂操作孔R1、R2、R3,辅助孔A,详见图4。
(1)镜头孔C:12 mm口径,置于脐右上方3~4 cm处。(2)机械臂操作孔R1:8 mm口径,置于右侧麦氏点,即脐与右髂前上棘连线外1/3处。(3)机械臂操作孔R2:8 mm口径,置于剑突下方3~4 cm,中线稍偏右侧,必须位于横结肠上方。(4)机械臂操作孔R3:8 mm口径,置于耻骨联合上方3~4 cm中线处。(5)辅助孔A:5 mm/12 mm口径,置于右锁骨中线外侧,镜头孔和机械臂操作孔R2中间的水平位置。
镜头孔的位置相对固定,其余Trocar位置依据肿瘤部位、患者体型及术者习惯进行调整,注意保持操作中心在肿瘤部位。相邻Trocar间距8~10 cm,避免机械臂交叉磕碰。所有尺寸均应以气腹后有张力的情况下为准。
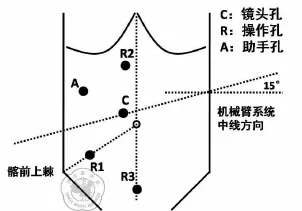
图4 机器人左半结肠癌根治术Trocar位置

图5 机器人左半结肠癌根治术手术室布置
3.腹腔探查
同前
4.机器人连接
机械臂系统安置于左侧肩部,中线过镜头孔C位置,与左肩成15°角,详见图4,图5。其它要点同前。
5.手术步骤
(1)显露术区:建议采用中间入路手术。助手在辅助孔用无损伤肠钳将小肠、大网膜移动至右侧腹。分别向上外侧及下外侧牵拉降结肠和直乙结肠交界处的肠系膜,辨认腹主动脉分叉处。(2)分离血管:于骶岬水平为始,沿腹主动脉向上剥离肠系膜,于肠系膜下血管左侧显露并裸化其发出的乙状结肠第1~2支和左结肠血管,清扫淋巴结。先后于根部Hemo-lock夹闭并切断动静脉。(3)游离降结肠:自肠系膜下静脉左侧起,沿左Toldt筋膜和左肾前筋膜之间的无血管间隙,在左侧精索/卵巢血管和左输尿管表面,自下向上(也可自上向下),自内向外进行分离。(4)游离脾曲:沿融合筋膜间隙(Toldt间隙)向头端及内侧分离,在无血管区打开横结肠系膜,结扎结肠中动脉左支,离断左侧胃结肠韧带、脾结肠韧带,完全游离脾曲。(5)游离乙状结肠和上段直肠:沿侧腹膜及肾前筋膜前上方完全游离降结肠、乙状结肠,必要时可游离直肠上段。确定切除肠段的距离,并游离肠系膜。(6)吻合:做左腹直肌切口拖出肠段,直视下裸化肠管,切断,移除标本。可用侧侧吻合器行横结肠乙状结肠侧侧吻合,也可用管状吻合器行横结肠与乙状结肠的端侧吻合。(7)关闭切口:适当冲洗(生理盐水或蒸馏水),放置引流,关闭切口。
(三)机器人右半结肠癌根治术
用于治疗盲肠、升结肠、结肠肝曲及横结肠右半的肿瘤。
1.体位
患者放置仰卧位,体位尽量靠近手术床头侧,髂前上棘最好位于手术床中轴以上。患者固定后,调整手术床为头低脚高(15~30°),左倾(10~15°)。
2.Trocar数量和位置
手术常用5枚Trocar:镜头孔C,机械臂操作孔R1、R2、R3,辅助孔A。详见图6。
(1)镜头孔C:12 mm口径,置于脐左下方3~4 cm处。(2)机械臂操作孔R1:8 mm口径,置于左锁骨中线肋缘下7~8 cm处。(3)机械臂操作孔R2:8 mm口径,置于中线耻骨联合上方6~8 cm处。(4)机械臂操作孔R3:8 mm口径,置于右侧麦氏点,即脐与右髂前上棘连线外1/3处。(5)辅助孔A:5 mm/12 mm口径,置于机械臂操作孔R1下方6~8 cm,左锁骨中线外侧,距镜头孔8 cm以上。
镜头孔的位置相对固定,其余Trocar位置依据肿瘤部位、患者体型及术者习惯进行调整,注意保持操作中心在肿瘤部位。相邻Trocar间距8~10 cm,避免机械臂交叉磕碰。所有尺寸均应以气腹后有张力的情况下为准。
3.腹腔探查
同前
4.机器人连接
机械臂系统安置于右侧肩部,中线过镜头孔C位置,与右肩成45°角,详见图6,图7。手术床在患者臀部要适当留有间隙,防止机械臂游离结肠肝曲时与患者右腿相互碰撞。其它要点同前。
5.手术步骤
(1)显露术区 建议采用中间入路手术。助手用无损伤肠钳将小肠移到左侧腹,找到并提起右结肠系膜,显露此处的回结肠动脉与肠系膜上静脉交叉处。
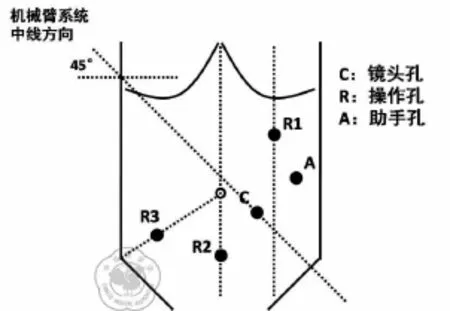
图6 机器人右半结肠癌根治术Trocar位置
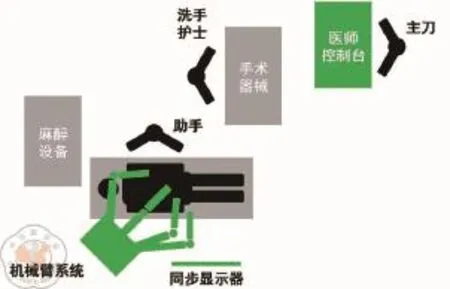
图7 机器人右半结肠癌根治术手术室布置
(2)分离血管 沿肠系膜上血管向上,分离裸化动静脉各个属支,清扫淋巴结。分别Hemo-lock夹闭并切断回结肠动静脉、右结肠动静脉和结肠中动静脉或结肠中动静脉右支。结肠肝曲癌和横结肠近肝曲癌行扩大右半结肠切除时,在胰腺下离断胃网膜右动静脉。(3)游离升结肠 自肠系膜上静脉右侧起,沿Toldt筋膜和右肾前筋膜之间的无血管间隙,在右侧精索/卵巢血管和右输尿管以及胰腺和十二指肠表面,自下向上,自内向外进行分离。(4)游离肝曲 打开胃结肠韧带,向右分离,游离结肠肝曲。若肿瘤位于肝曲或横结肠近肝曲处,清扫胃网膜右血管淋巴结。游离切除距肿瘤至少10厘米的大网膜。(5)游离侧腹膜 从回盲部向上分离外侧腹膜,与肝曲游离部位相汇合。(6)吻合 根据肿瘤所在部位决定切除肠段,分别游离结肠系膜及小肠系膜直到切端。吻合方法多种。可作辅助切口行拖出吻合,也可行腹腔内吻合:将末端回肠与结肠靠拢,置入直线切割吻合器,侧侧吻合回肠与横结肠,后再用切割吻合器断离手术标本。也可用管状吻合器行回肠结肠端侧吻合。(7)关闭切口 适当冲洗(生理盐水或蒸馏水),放置引流,关闭切口。
五、机器人多脏器联合切除
结直肠癌的局部侵犯与远处转移均很常见,多脏器联合切除也是结直肠癌根治的重要手段。机器人手术同样适用于多脏器的联合切除[15]。但是手术需要多学科团队讨论后,由有经验的相关科室的手术人员共同实施。对于局部晚期,侵犯周围脏器的结直肠癌(多为直肠癌侵犯膀胱、卵巢、子宫),机器人可以一并切除,无需撤离及重新连接机械臂。对于出现肝转移、肺转移等远处转移的结直肠癌,同样可以行机器人同期手术:在切除一处病灶后,需要重新进行操作孔的穿刺和机器人的定位连接。尽量协调共用部分操作孔,减少患者创伤。机器人肝切除已经被证实安全有效[16,17];机器人肠肝同步切除的远期效果尚待评估。
六、并发症防治
机器人结直肠手术的很多并发症与传统腹腔镜相似,也有机器人手术特有的并发症。
(一)术中并发症
1.穿刺损伤
血管损伤和肠管损伤。预防:穿刺时注意把握,建议使用开放法置入第一个穿刺器。治疗:一旦发现及时中转开腹,及时缝合修补损伤肠管。
2.气腹相关并发症
心肺功能异常,高碳酸血症。预防:术中严密监测,尽量避免出现广泛的皮下气肿,术中保持良好肌松,尽量缩短手术时间。治疗:尽快结束手术,排除腹腔内CO2。
3.术中血管损伤出血
肠系膜上下血管及其分支损伤,骶前静脉损伤,盆壁血管损伤等。预防:熟悉正常解剖和变异,正确显露手术平面和裸化,熟练使用电设备。治疗:术中镇静,团队密切配合,正确使用止血工具。
4.相邻脏器损伤
输尿管、膀胱、前列腺、尿道、阴道、十二指肠、肝脾、胆囊等损伤。预防:熟悉正常解剖,沿正确的平面进行分离,避免误损伤。治疗:及时发现及时处理。
5.肠道吻合和造口相关并发症
肠壁裸化损伤,肠壁破裂,吻合口裂开出血,造口出血等。预防:注意操作技巧,合适的分离切除范围,选用合适的切割闭合和吻合器械。治疗:缝合修补损伤,重新裸化,使用合适的切割闭合器和吻合器并注意操作要点,吻合口缝合加固,预防性造口或置管减压引流等。
6.机械臂失控、不灵活
可能的原因是器械安装更换时候没有完全契合。解决方案:重新安装或者更换器械。
7.组织嵌入手术器械关节
由于手术器械的多角度活动可能会在关节处夹到组织。解决方案:一则应该在操作时候避开周围组织,二则根据嵌入组织的类型可以切除,如果是肠管部分必须修补。
8.“热剪”保护套的破裂
保护套的破裂会引起破裂部位的意外灼伤。解决方案:定期更换保护套,手术时候发现有意外灼伤应该检查保护套,如有损坏给与更换。
9.手术器械无法到达目标区域
手术中发现手术器械无法前进到所需要手术的区域。解决方案:检查各个机械臂之间是否有接触,影响机械臂活动。各个trocar的套管是否体外留的过长,影响机械臂深入。
(二)术后并发症
1.吻合口漏
多发生在低位和超低位直肠前切除术后。预防:预防性造口,关闭盆底腹膜,放置肛管引流等。治疗:如腹膜炎较局限,保持引流通畅,使用全身性抗菌药物,一旦出现急性弥漫性腹膜炎,建议手术探查,行腹腔灌洗引流加造口术。
2.肠梗阻
肠梗阻可发生在术后任何时间,可以发生在肠道的任何部位。术后早期的肠梗阻较开腹手术减少。预防:如能关闭系膜建议关闭系膜,必须避免关闭不全。术后早期下床活动。治疗:确诊梗阻进行保守治疗无缓解时应及时手术探查。
3.排尿与性功能障碍
该并发症重在术中有意识显露和保护盆神经。
4.Trocar疝和造口旁疝
多发生于>10 mm切口,好发于年老、腹壁薄弱的患者。预防:缝合关闭>10 mm切口,尽量去除引起患者腹内压增高的因素。治疗:可行手术修补。
5.乳糜漏
根治性右半结肠切除术乳糜漏的发生率高于左半结肠和直肠癌根治术。预防:使用合适的电设备清扫肠系膜血管根部。治疗:禁食、肠外营养支持,无脂饮食,延迟拔除腹腔引流管。
(三)特殊并发症
机器人结直肠手术有一些与机器系统使用相关的风险,特别是机器人远程手术,即手术医师可能在与病人有一定距离的地方进行手术,有着特殊的危险。准确地控制机器人取决于手术医师的控制台与手术室中机器人之间连接的数据质量。所有的机械和电子设备都易损,手术用机器人也不例外。
七、术后处理
术后观察呼吸、体温变化、引流液量及性状、尿量尿色、切口恢复情况等。注意有无高碳酸血症、腹腔内出血、吻合口出血、吻合口漏、感染等。
给予适当营养支持;积极翻身拍背,化痰治疗,咳痰;预防性应用抗生素;早期下床活动,预防深静脉血栓;早期锻炼排尿功能。患者通常可早期恢复排气,视具体情况逐步恢复饮食。有造口的患者出院前学习相关护理知识。
八、机械故障与处理
机械故障的处理是机器人手术安全的重要组成部分。术中机器人故障通常分为:可恢复故障和不可恢复故障。可恢复故障出现时,机械臂上的指示灯变成黄色,同时系统发出报警音,手术室人员可根据屏幕提示解除故障,并继续手术;不可恢复故障出现时,机械臂上的指示灯变成红色,同时系统发出报警音,手术室人员需记下屏幕上的报错代码(以便维修人员能快速及时查到故障所在),然后重启系统,部分不可恢复故障可以通过此方法解决,从而继续手术,但严重故障经多次重启系统也不能解决时,需撤离机器人,转腔镜手术或开放手术,并通知维修工程师到场检修。
主操控台上有一个紧急制动按钮,非紧急状况不得随意按动!
《机器人结直肠癌手术专家共识(2015)》编审委员会成员名单
组长:许剑民 秦新裕 余佩武
成员(按姓氏汉语拼音排序)
程龙伟 杜晓辉 管文贤 何裕隆
贾宝庆 姜可伟 江志伟 李太原
潘义生 秦新裕 邱辉忠 司亚卿
唐 波 屠世良 王 康 汪 欣
王自强 韦 烨 吴国生 许剑民
叶颖江 余佩武 袁维堂 曾冬竹
张 卫 张小桥 张雪峰 钟 鸣
周岩冰
执笔:许剑民 秦新裕
秘书:何国栋 冯青阳
[ 1 ] Heemskerk J, Zandbergen H R, Keet S W, et al. Relax, itʹs just laparoscopy! A prospective randomized trial on heart rate variability of the surgeon in robot-assisted versus conventional laparoscopic cholecystectomy. Dig Surg, 2014, 31(3): 225-232.
[ 2 ] Butler K A, Kapetanakis V E, Smith B E, et al. Surgeon fatigue and postural stability: is robotic better than laparoscopic surgery? J Laparoendosc Adv Surg Tech A, 2013, 23(4): 343-346.
[ 3 ] Hubert N, Gilles M, Desbrosses K, et al. Ergonomic assessment of the surgeonʹs physical workload during standard and robotic assisted laparoscopic procedures. Int J Med Robot, 2013, 9(2): 142-147.
[ 4 ] Broholm M, Pommergaard H C, Gogenur I. Possible benefits of robot-assisted rectal cancer surgery regarding urological and sexual dysfunction: a systematic review and meta-analysis. Colorectal Dis, 2015, 17(5): 375-381.
[ 5 ] Kim C W, Kim C H, Baik S H. Outcomes of robotic-assisted colorectal surgery compared with laparoscopic and open surgery: a systematic review. J Gastrointest Surg, 2014, 18(4): 816-830.
[ 6 ] Liao G, Zhao Z, Lin S, et al. Robotic-assisted versus laparoscopic colorectal surgery: a meta-analysis of four randomized controlled trials. World J Surg Oncol, 2014, 12: 122.
[ 7 ] Xiong B, Ma L, Zhang C, et al. Robotic versus laparoscopic total mesorectal excision for rectal cancer: a meta-analysis. J Surg Res,2014, 188(2): 404-414.
[ 8 ] Yang Y, Wang F, Zhang P, et al. Robot-assisted versus conventional laparoscopic surgery for colorectal disease, focusing on rectal cancer: a meta-analysis. Ann Surg Oncol, 2012, 19(12): 3727-3736.
[ 9 ] Ortiz-Oshiro E, Sanchez-Egido I, Moreno-Sierra J, et al. Robotic assistance may reduce conversion to open in rectal carcinoma laparoscopic surgery: systematic review and meta-analysis. Int J Med Robot, 2012, 8(3): 360-370.
[ 10 ] Memon S, Heriot A G, Murphy D G, et al. Robotic versus laparoscopic proctectomy for rectal cancer: a meta-analysis. Ann Surg Oncol, 2012, 19(7): 2095-2101.
[ 11 ] Trastulli S, Farinella E, Cirocchi R, et al. Robotic resection compared with laparoscopic rectal resection for cancer: systematic review and meta-analysis of short-term outcome. Colorectal Dis,2012, 14(4): e134-e156.
[ 12 ] Xu H, Li J, Sun Y, et al. Robotic versus laparoscopic right colectomy: a meta-analysis. World J Surg Oncol, 2014, 12: 274.
[ 13 ] Rondelli F, Balzarotti R, Villa F, et al. Is robot-assisted laparoscopic right colectomy more effective than the conventional laparoscopic procedure? A meta-analysis of short-term outcomes. Int J Surg,2015, 18: 75-82.
[ 14 ] Graling P R, Colvin D B. The lithotomy position in colon surgery. Postoperative complications. AORN J, 1992, 55(4): 1029-1039.
[ 15 ] Xu J M, Wei Y, Wang X Y, et al. Robot-assisted one-stage resection of rectal cancer with liver and lung metastases. World J Gastroenterol, 2015, 21(9): 2848-2853.
[ 16 ] Montalti R, Berardi G, Patriti A, et al. Outcomes of robotic vs laparoscopic hepatectomy: A systematic review and meta-analysis. World J Gastroenterol, 2015, 21(27): 8441-8451.
[ 17 ] Qiu J, Chen S, Chengyou D. A systematic review of robotic-assisted liver resection and meta-analysis of robotic versus laparoscopic hepatectomy for hepatic neoplasms. Surg Endosc, 2015.
(本文编辑:杨明)
中国医师协会外科医师分会结直肠外科医师委员会, 中国研究型医院学会机器人与腹腔镜外科专业委员会. 机器人结直肠癌手术专家共识(2015)[J/CD]. 中华结直肠疾病电子杂志, 2015, 4(6): 584-590.
Expert consensus of robotic surgery in colorectal cancer (2015 edition)
Professional Committee of Colorectal Surgeons, Chinese College of Surgeons of Chinese Medical Doctor Association, Robotic and Laparoscopic Surgery Committee of Chinese Research Hospital Association.
Corresponding author: Xu Jianmin. Department of General Sugery, Zhongshan Hospital, Fudan University,Shanghai 200032, China. Email: xujmin@aliyun.com
Colonic neoplasms; Rectal neoplasms; Robotic surgical system; Consensus
10.3877/cma.j.issn.1672-6448.2015.06.01
20032 上海,复旦大学附属中山医院普通外科
许剑民,Email:Xujmin@aliyun.com
(2015-12-1)
