无谐波检测环节三电平A P F控制系统的研究
2015-08-22孙爱俊卫进路
孙爱俊 严 彬 卫进路 盛 会
(1.宝胜科技创新股份有限公司,江苏 扬州 225800;2.安徽理工大学电气与信息工程学院,安徽 淮南232001)
0 引言
近年来,无谐波检测三电平有源电力滤波器控制方法也有学者将其称为直接电源控制方法,因为其无需检测和计算负载中谐波及无功电流等优点,愈发引起了学者的广泛关注。该控制策略直接对有源电力滤波器所在的电网电流或者电网功率进行控制,无需谐波电流及无功电流的检测和计算。本文在APF常规控制算法演化变换的基础上,论证了无需谐波检测环节的APF控制系统的可行性及优越性,并进行了仿真实验验证。
1 并联型APF交、直流侧功率的传递
由三相电路瞬时无功功率理论知,各相瞬时无功独自来看并不为零,但是其三相总和确是零,说明瞬时无功在各相间传递。所以,对于APF来说,瞬时无功并不APF交、直流侧交换传递。定义三相瞬时有功功率和为p,因此忽略功率变换器及线路的损耗前提下,传到APF直流侧功率全部等于p,即APF交、直流侧能量的交换由瞬时有功功率p所决定。
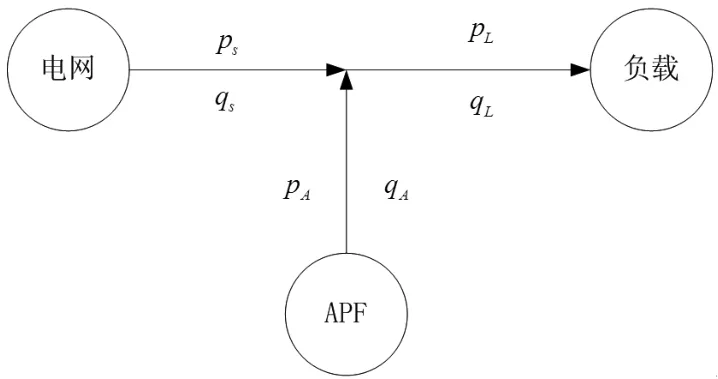
图1 APF交、直流侧功率的传递图
设电网侧瞬时功率(有功和无功)为:PS,qS,APF输出侧瞬时功率(有功和无功)为:PA,qA,非线性负载端瞬时功率(有功和无功)为:PL,qL,非线性负载产生谐波,其中 PL,qL能够分解为直流部分和交流部分整个系统的功率能量交换图如图 1 所示。
APF同时补偿非线性负载的谐波和无功时,满足:
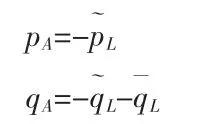
得出:
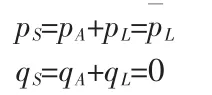
可以看出,此时电网侧只需要提供非线性负载所需的瞬时有功功率的直流分量,网侧电流等于非线性负载中的基波有功电流。因为PA的平均值为零,从而保证了直流侧电压稳定,但因PA中的交流成分,直流侧电压会不可避免的实时的波动,直流侧电容电压处于动态平衡状态。
当pA=eΔip<0时,即 APF从网侧获得能量,不断的向功率变换器直流侧传递,此时直流侧电压会升高。当pA=eΔip<0时,即APF向外传递能量,直流侧电容储存的能量降低,此时直流侧电压会下降。换言之,当功率变换器直流侧电压平均值发生波动时,APF必然吸收或者向外馈送能量,该平均值的变化反映了APF交直流侧能量的传递方向。
2 有源电力滤波器常规控制与等效演化
APF常规控制中谐波检测环节一般采用经典的ip-iq检测算法,如图2所示。
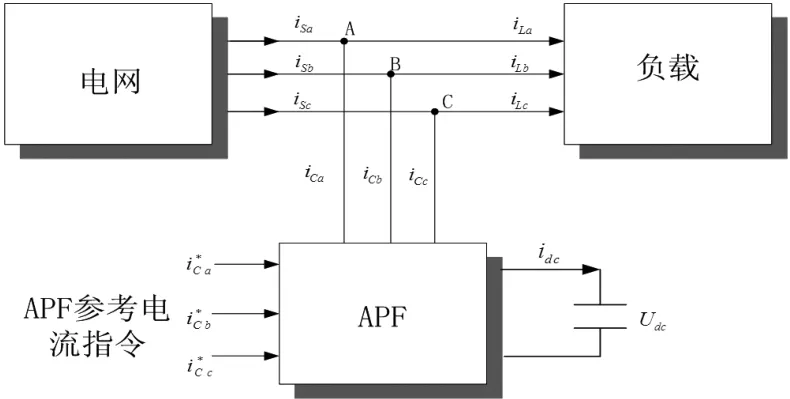
图2 APF系统简化框图
负载电流iLa,iLb,iLc经坐标变换得出瞬时有功电流与无功电流:ip,iq经LPF,滤除代表基波分量的直流量iaf,ibf,icf用总负载电流减去该直流量 iaf,ibf,icf即可检测出谐波电流。当需要检测负载无功时,只需将图2中iq通道断掉。最终检测出来的三相电流作为APF的给定指令电流,由后续的电流环进行跟踪输出。
现根据APF的两种补偿目标进行控制的等效演化,当补偿目标为只补偿谐波电流
当补偿目标为补偿谐波及无功时,进一步把三相电流跟踪控制器加入控制系统,则在考虑电流跟踪环节的APF常规控制等效框图中电流跟踪环节也以三相滞环电流控制来代替研究。此时电流内环的参考电流指令由负载电流,负载基波有功电流以及电压环PI调节器输出三部分组成。
经过上述分析可知,虽然常规控制有不同的补偿目标,但是都可以演化为在直流侧电压控制的基础上引入了电流前馈控制,不同的APF补偿目标由具体基波电流前馈的成分所决定,如表1所示。另外,常规控制中,虽然直流侧电压控制的输出也是基波有功电流,但与前馈的有功电流分量相比很小。
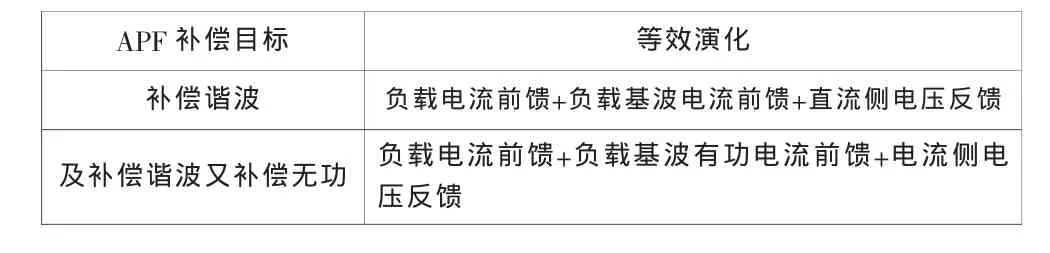
表1 APF不同控制目标下的等效演化
3 无谐波检测环节三电平APF控制系统
由上节分析可知,APF补偿谐波及无功时,能否准确无误剥离出负载基波有功电流决定了最终谐波检测的精度。当检测得基波有功电流 iaf,ibf,icf很理想时(无延时、无误差),最终得到的指令电流 i*Ca,i*Cb,i*Cc为负载电流中的全部谐波无功分量,保证了APF最终补偿效果。若检测基波有功电流存在误差,指令电流i*Ca,i*Cb,i*Cc便不是负载电流中的全部谐波无功分量,从而导致APF最终的补偿效果变差,甚至会给电网注入不想要的谐波。因此,谐波及无功电流的检测环节的存在很有可能会在补偿时对电网造成不想要的影响。
由于常规控制方法的谐波检测环节存在低通滤波器,数字低通滤波器实现复杂,会加重DSP程序的运算的负担。且滤波器的截止频率选取比较困难,截止频率大时快速性高,但滤波效果变差;截止频率小时滤波效果好,但降低了快速行。总之,APF的动态响应速度的提高程度取决于检测算法的优化,但只要谐波检测环节存在就很难避免检测的延迟与误差,影响谐波补偿效果。
由前面所述可知,当APF直流侧电压保持不变时,交、直流侧没有有功功率的交换,即APF三相输出电流的有功分量为0(忽略线路及功率变换器损耗),因此有等式:
其中,iLaP,iLbP,iLcP为负载实际基波有功分量,如果检测基波有功电流存在误差,即:
此时,电压环PI调节器的输出就会自动调整输出值,最终使式成立,保证有功电流的平衡。假设最极端的情况,即检测出来的基波有功电流iaf=ibf=icf=0时,APF电压调节器的输出仍然不断调节,最终满足:

这表明,由于电压环PI调节器的作用,控制系统会自动对基波有功电流的检测误差自动调整补偿回去。根据上述极端情况iaf=ibf=icf=0的论述,完全可以把有功电流检测环节去掉,从而构建出APF在abc三相坐标系上基于电流滞环控制器的无谐波检测环节控制方案。此时,无谐波检测环节APF的控制思想本质上就是功率变换器直流侧电容电压稳定控制与非线性负载电流前馈组成的复合控制策略。
而三电平APF在dq旋转坐标系上的数学模型为:
其中,Sd、Sq三相开关函数dq坐标轴的分量。

根据上述dq坐标系互相耦合的APF数学模型,可构建出三电平APF在dq坐标系上基于SVPWM调制控制的无谐波检测环节控制框图。
4 无谐波检测环节三电平APF仿真实验
为验证无谐波检测环节三电平APF控制策略的有效性,在MATLAB平台上对三电平APF控制系统进行仿真实验研究。仿真实验参数如表2所示,其中用三相二极管整流桥带阻感负载来模拟谐波源。
仿真采用基于PI控制器的无谐波检测环节APF反馈解耦控制策略,仿真实验结果如下列图所示:
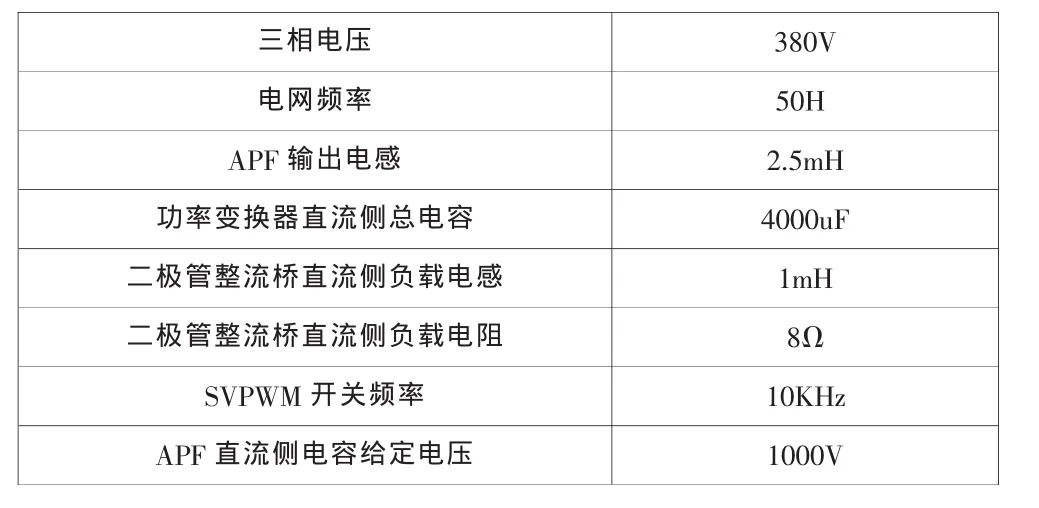
表2 三电平APF系统仿真实验参数

图3 谐波源负载三相电流波形
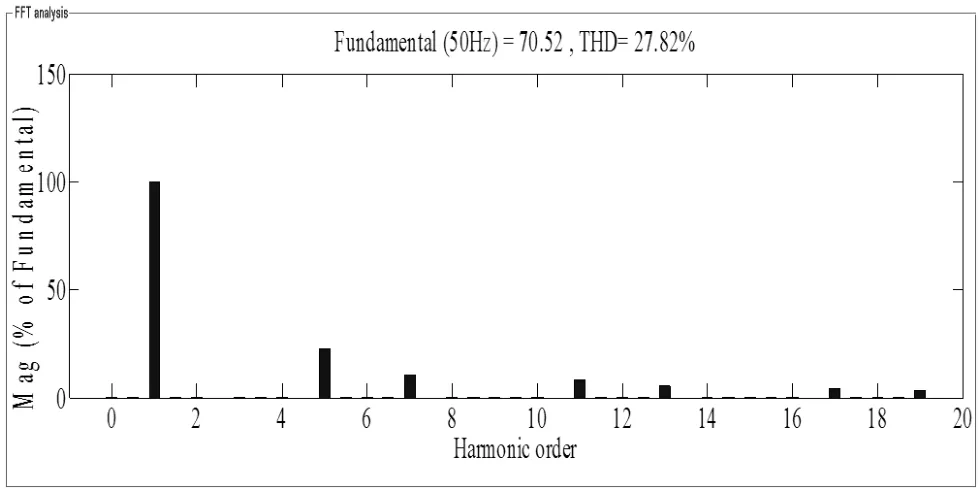
图4 谐波源负载A相电流频谱分析
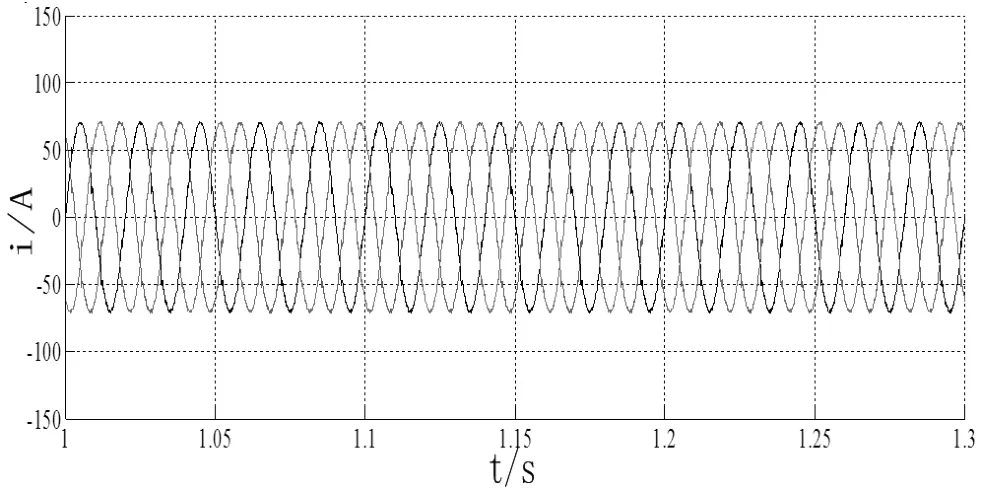
图5 补偿后网侧三相电流波形
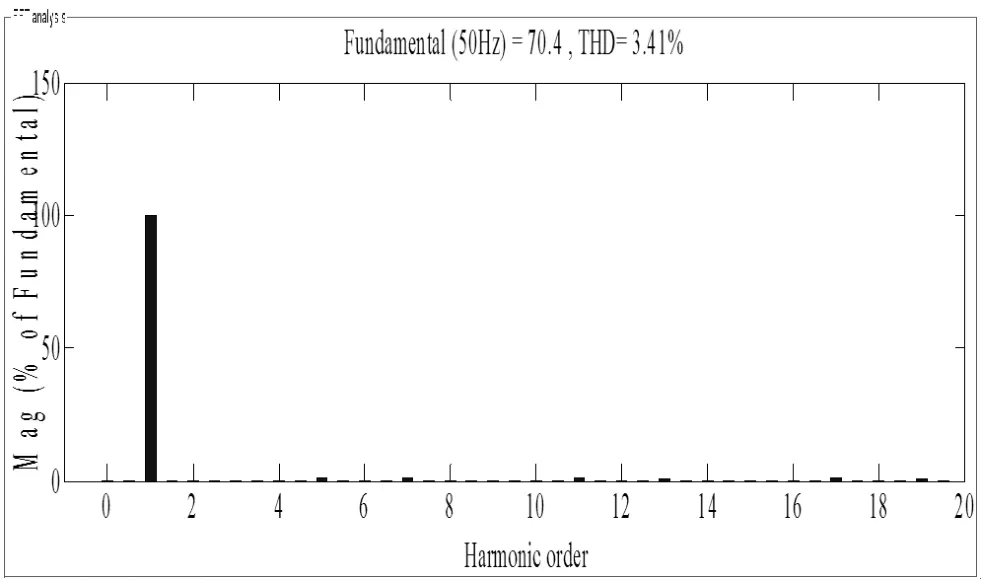
图6 补偿后网侧A相电流频谱分析
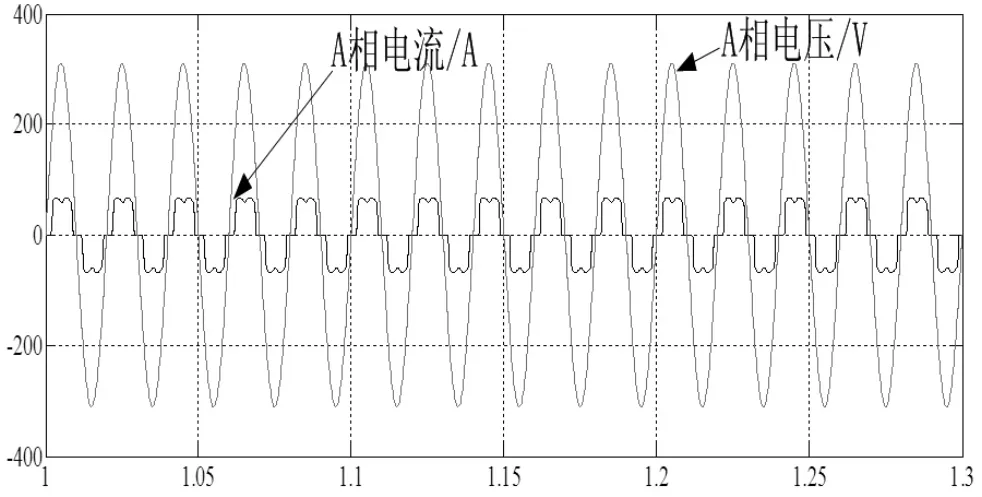
图7 补偿前网侧A相电流与A相电网电压波形图
图3 为补偿前电流波形,由图5和图6可以看出,经过APF的有效补偿控制,电网侧三相电流有较好的正弦度,网侧电流的畸变率由27.82%降至3.41%。
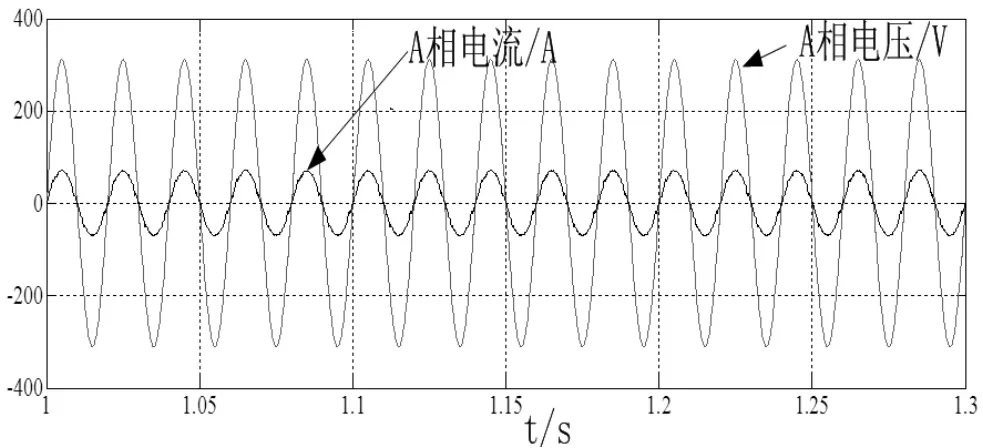
图8 补偿后网侧A相电流与A相电网电压波形

图10 APF输出A相电流波形

图11 APF直流侧总电容电压波形
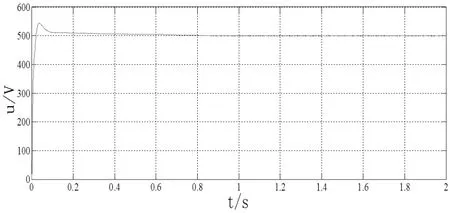
图12 APF直流侧上电容电压波形

图13 APF直流侧中点电波形

图14 APF输出侧线电压阶梯波
该无谐波检测环节APF控制策略的补偿目标是同时补偿谐波及无功,由图7和图8的对比可以看出,补偿后电网A相电流与A相电压能够保持同相位(单位功率因数运行),负载无功功率也取得了很好的补偿效果。图9是电压环控制器的输出波形,APF启动时输出以150A的限幅值运行,APF直流侧电压达到稳定后,电压控制输出在70A左右波动。根据本文前面的分析可知,补偿效果理想时,电压环控制器的输出值应该与网侧电流的幅值相等,通过图6能够看出,仿真结果与理论分析基本上一致。图11为APF直流侧总电压波形图,使直流侧电压保持稳定是APF取得较好补偿效果的前提,从图中可以看出直流侧电压能够保持稳定。图13为APF直流侧中点电位波形,实时调节中点电位平衡因子便能控制住中点电位的波动,仿真中平衡因子取f=0.5,可以看出APF直流侧中点电压波动得到了很好的控制。
5 小结
基于瞬时无功功率理论,对并联型APF交、直流侧能量传递过程进行了分析。对APF常规控制进行了等效的演化研究,发现APF不同补偿目标对应了不同的有功电流的前馈值,分析出负载有功电流的检测环节的存在对APF补偿效果没用益处,反而会减弱补偿精度。根据APF谐波检测环节存在的不必要性论证,分别构建了APF在abc三相坐标系下的无谐波检测环节控制系统及三电平APF在dq坐标系下的无谐波检测环节前馈解耦控制系统。最后,对三电平无谐波检测环节控制系统进行了仿真实验研究,实验结果验证了无谐波检测环节补偿的可行性及有效性。
[1]平阳乐.基于三电平变换器的并联型有源电力滤波器研究[D].山东大学,2013.
[2]石榴明璇,谢运祥,杨金.基于电流预测控制的有源电力滤波器仿真研究[J].低压电器,2010(01).
[3]刘骥,徐在德,高岩涛,黄玲.单电流检测配网静止同步补偿器的改进控制策略[J].电力自动化设备,2013(04).
[4]李慧,王奔,李虎威,吴维鑫.有源电力滤波器双开关表直接功率控制策略研究[J].电气传动,2011(05).
[5]江友华,廖代发,唐忠.混合有源滤波器多目标优化设计[J].控制理论与应用,2010(07).
[6]朱念.有源电力滤波器的发展及关键技术[J].硅谷,2009(19).
[7]刘亚栋,杨洪耕,陈丽,刘亚梅.非稳态谐波和间谐波检测的新方法[J].电网技术,2012(01).
[8]许津铭,谢少军,肖华锋.LCL滤波器有源阻尼控制机制研究[J].中国电机工程学报,2012(09).