红枣表面缺陷快速检测方法研究
2015-08-20张萌许敏
张萌 许敏

摘要:红枣表面缺陷快速检测是实现其自动分级的关键技术之一。针对红枣表面曲率变化致使其表面灰度分布很不均匀和缺陷区域很不明显的特点,提出了一种亮度快速校正算法。首先使用单色CCD、滤光片和近红外光源获得红枣近红外图像;其次对原始图像进行去背景操作,获得红枣区域灰度图像;然后使用均值滤波器对去背景后的图像进行滤波获得亮度图像,并使用该亮度图像对去背景后的红枣图像进行亮度校正;最后对亮度校正后的图像进行缺陷分割。试验结果表明,该方法能显著提高自动分级系统的实时性,且该缺陷检测方法的准确率可达95%。
关键词:表面缺陷检测;近红外图像;亮度校正;自动分级
中图分类号:TP274+.52 文献标志码: A 文章编号:1002-1302(2015)07-0331-03
红枣具有极高的营养价值及药用价值,受到了越来越多的消費者青睐[1]。作为中国的重要经济作物,种植面积与产量逐年提高,但霉烂、虫害等缺陷严重影响了红枣的品质和价值,必须将其从正常枣中分选出来。目前,缺陷红枣的剔除采用人工分选方法,缺点是工作量大,劳动效率低,准确性差。计算机视觉技术具有效率高、精度高、检测信息丰富、非接触等优点,已在农产品表面缺陷检测领域获得了广泛应用[2]。
由于农产品表面缺陷区域与正常区域在颜色上存在显著差异,因此大部分缺陷检测算法是在颜色空间中进行。朱伟华等提出了基于模糊颜色聚类的缺陷分割方法,并将该方法应用于番茄的缺陷分割[3]。李锦卫等将灰度截留分割法与改进的十色模型应用到马铃薯表面缺陷检测中,试验结果该方法能够快速、有效检测出马铃薯表面缺陷[4]。赵杰文等提取HSI颜色空间中H分量的均值与方差作为红枣的颜色特征,并使用支持向量机建立了红枣缺陷识别模型,该模型对预测集样本的预测准确率可达96.2%[5]。李江波等对球型水果表面灰度分布不均进行了灰度补偿(亮度校正),然后使用单一阈值一次性分割获得了脐橙表面缺陷区域[6]。该方法简单高效,在水果表面缺陷在线检测中有较大的应用潜力。
目前,RGB彩色成像系统已经广泛应用于水果分级检测中,但RGB彩色成像系统在识别一些水果表面缺陷时性能较差,主要原因是缺陷区域通常对R、G和B波段不敏感[7]。因此,许多研究者尝试使用近红外成像系统来检测水果表面缺陷。Kim等对苹果表面的虫害粪便污染进行了多波段(450~850 nm)反射特性试验[8],并对受污染的苹果进行缺陷算法开发试验。Kleynen等研究发现750 nm波段图像能有效区分苹果表面大部分缺陷和正常组织[9]。Lee等将近红外CCD应用到椰枣表皮剥落缺陷检测中,与普通CCD相比,近红外CCD获取的图像其缺陷区域的对比度得到明显增强[10]。目前该系统已用于实际生产,分级精度最高可达95%。展慧等提出了近红外光谱和机器视觉的多源信息融合技术的板栗缺陷检测方法,建立了3层BP神经网络融合识别模型,该模型对测试样本的识别率为90%[11]。
目前,水果表面缺陷视觉检测技术面临的主要问题是如何快速、准确地定位缺陷区域。由于水果通常呈球体或椭球体,其表面的曲率变化使得灰度分布很不均匀,水果中心区域的灰度值较高,边缘区域的灰度值较低,而水果表面缺陷通常以较低的灰度值出现在图像中。因此,水果表面缺陷很难用单一阈值进行分割。本研究以新疆和田枣为对象,研究其表面亮度校正算法和表面缺陷快速检测方法,为红枣的自动分级提供理论依据和技术支持。
1 图像采集系统
红枣图像采集系统如图1所示。该系统由输送线、光照装置、计算机视觉系统组成。输送线采用2排双锥式滚子来输送和翻转红枣,整个输送线为黑色。双锥式滚子以一定的间隔均匀地装在链条上,链条由传动轮来带动。红枣放置在滚子之间,双锥式滚子与摩擦带紧密接触,当摩擦带与双锥式滚子之间存在速度差时,由速度差产生的摩擦力使双锥式滚子在向前运动的同时绕水平轴转动,带动红枣翻转,从而保证摄像机获得红枣的全表面图像。计算机视觉系统由HD-HV1351UM相机、图像采集卡、2条LED近红外光源、滤光片和计算机构成。
2 图像处理
2.1 图像采集
图像采集采用触发抓拍的方式。红枣运动状况检测传感器安装在图像采集区域内,用于检测待红枣是否到达预定的图像采集位置。当传感器检测到红枣到达预定位置时发出触
发信号,图像采集卡受到触发,红枣图像被采集到计算机内存中,等待进一步的处理。同一红枣被连续抓拍4次,理想状态下4幅图像可以组成红枣几乎完整的表面。图2所示为采集系统获取的红枣图像,其中前3幅存在虫害缺陷,最后1幅不存在缺陷。
2.2 图像预处理
图像预处理目标是去除背景及噪声,由于掩模具有去除背景及噪声的同时不破坏缺陷区域的优点[12],本研究采用掩模法去除背景。掩模法去除背景的关键是构建完整的掩模图像。从图2 可以看出,红枣区域的灰度明显高于背景区域。因此,可以使用一个简单阈值T对图像进行二值化并将该二值图像作为掩模图像。在本试验中阈值T设为70,基于此阈值将红枣原始图像Iorig的目标区域设置为1,背景区域设置为0,然后再进行形态学开运算及填充运算,去除目标区域中的噪声干扰及目标区域中出现的空洞,形成二值掩模图像Temp,红枣二值掩模图像见图3。然后进行如公式(1)的运算就可以获得不含背景的红枣灰度图像。
Imask=Iorig×Temp。(1)
式中:Imask为掩模操作后的图像。去背景后的红枣灰度图像见图4,掩模去除了背景且完整地保留了红枣正常区域及缺陷区域。从图4可以看出,图像中心区域较亮,而红枣边缘及缺陷区域较暗,这将影响缺陷区域分割的准确性。为此,本试验研究了红枣表面亮度校正方法。
2.3 亮度校正
亮度校正的目的是消除水果表面灰度分布不均对缺陷检测的影响。李江波等基于照度-反射模型,使用低通滤波获取R分量图像的亮度分量并使用此亮度分量对去背景后的R 分量图像进行亮度校正[13]。使用的亮度校正算法是在频域中进行的,整个校正过程包括:中心变换、离散傅立叶变换、
Butterworth低通滤波器设计以及傅立叶反变换,算法的计算量非常大。为了提高检测系统的实时性,本研究提出了一种空域内直接亮度校正算法。
2.3.1 亮度图像获取 设f(x,y)表示某一图像,h(x,y)表示某一形式的滤波器,则亮度图像可以表示为:
I(x,y)=f(x,y)h(x,y)。(2)
式中:I (x,y)表示亮度图像,表示卷积。亮度图像获取的关键是滤波器的设计,本研究直接对去背景后的红枣灰度图像进行均值滤波。设f (x,y)表示某一图像,其大小为M×N,Temp表示大小为m×m的方形均值滤波模板,通过的试验,均值滤波模板的尺寸可由公式(3)确定。
m=round[min(M,N)8]×2+1。(3)
式中:min(M,N)表示取M和N的较小值;round()表示圆整。
2.3.2 亮度校正及缺陷区域分割 在获得亮度图像I(x,y)后(图5),利用公式(4)对亮度图像进行校正。
f′(x,y)=f(x,y)I(x,y);
F(x,y)=255 if f′(x,y)≥1255 f′(x,y) if f′(x,y)<1。(4)
式中: f′(x,y)为亮度校正后的图像,F(x,y)表示将亮度校正后的图像灰度限制在[0,255]区间内。
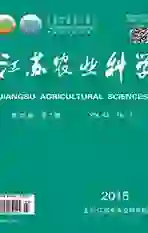
亮度校正后的图像见图6。从图6可以发现红枣正常表面经校正后呈现为高灰度区域,而缺陷区域仍然为低灰度区域, 即使缺陷位于图像的边缘区域(此时缺陷较难检测)也能
达到非常好的校正效果。亮度校正后的图像,使用一个简单阈值即可分割出红枣表面缺陷区域。分割结果见图7(所用阈值为170)。
3 试验分析
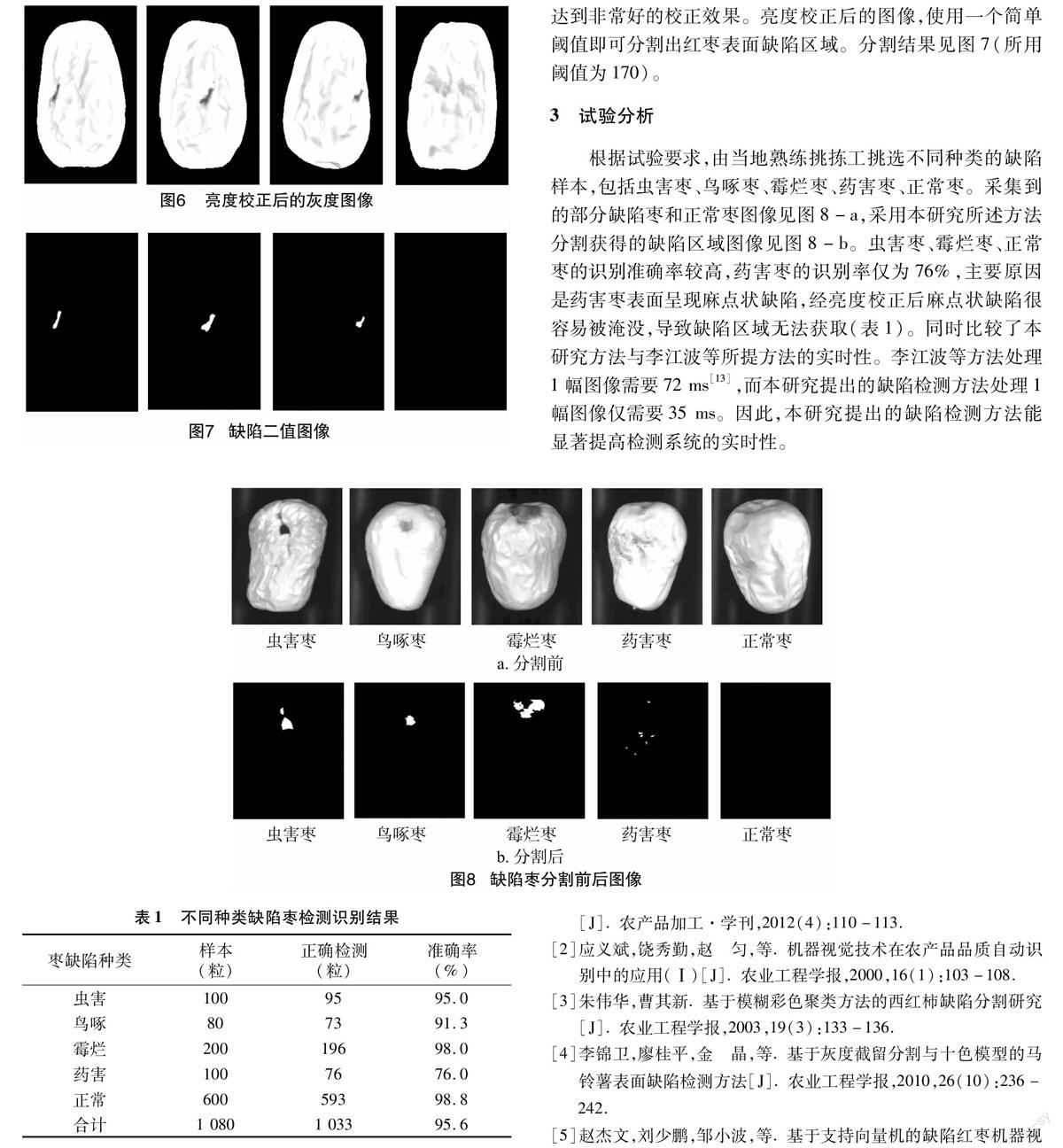
根据试验要求,由当地熟练挑拣工挑选不同种类的缺陷样本,包括虫害枣、鸟啄枣、霉烂枣、药害枣、正常枣。采集到的部分缺陷枣和正常枣图像见图8-a,采用本研究所述方法分割获得的缺陷区域图像见图8-b。虫害枣、霉烂枣、正常枣的识别准确率较高,药害枣的识别率仅为76%,主要原因是药害枣表面呈现麻点状缺陷,经亮度校正后麻点状缺陷很容易被淹没,导致缺陷区域无法获取(表1)。同时比较了本研究方法与李江波等所提方法的实时性。李江波等方法处理1幅图像需要72 ms[13],而本研究提出的缺陷检测方法处理1幅图像仅需要35 ms。因此,本研究提出的缺陷检测方法能显著提高检测系统的实时性。
4 结论
本研究针对红枣表面灰度分布不均,致使其表面缺陷难以快速准确定位问题,提出了一种果面灰度分布不均快速补偿方法。经该补偿方法处理后,果面缺陷区域特征得到显著增强。试验结果表明,与已有果品表面缺陷检测方法相比,本方法能显著提高果品自动分级系统的实时性,同时该缺陷检测方法综合准确率可达95%以上。
参考文献:
[1]初 乐,吴茂玉,朱风涛,等. 新疆地区红枣产业现状及发展建议[J]. 农产品加工·学刊,2012(4):110-113.
[2]应义斌,饶秀勤,赵 匀,等. 机器视觉技术在农产品品质自动识别中的应用(Ⅰ)[J]. 农业工程学报,2000,16(1):103-108.
[3]朱伟华,曹其新. 基于模糊彩色聚类方法的西红柿缺陷分割研究[J]. 农业工程学报,2003,19(3):133-136.
[4]李锦卫,廖桂平,金 晶,等. 基于灰度截留分割与十色模型的马铃薯表面缺陷检测方法[J]. 农业工程学报,2010,26(10):236-242.
[5]赵杰文,刘少鹏,邹小波,等. 基于支持向量机的缺陷红枣机器视觉识别[J]. 农业机械学报,2008,39(3):113-115,147.
[6]李江波,饶秀勤,应义斌. 基于照度-反射模型的脐橙表面缺陷检测[J]. 农业工程学报,2011,27(7):338-342.
[7]Gowen A A,ODonnell C P,Cullen P J,et al. Hyperspectral imaging-an emerging process analytical tool for food quality and safety control[J]. Trends in Food Science & Technology,2007,18(12):590-598.
[8]Kim M S,Lefcourt A M,Chao K,et al. Multispectral detection of fecal contamination on apples based on hyperspectral imagery:Part Ⅰ. Application of visible and near-infrared reflectance imaging[J]. Trans of the ASAE,2002,45(6):2027-2037.
[9]Kleynen O,Leemans V,Destain M F. Development of a multi-spectral vision system for the detection of defects on apples[J]. Journal of Food Engineering,2005,69(1):41-49.
[10]Lee D J,Schoenberger R,Archibald J,et al. Development of a machine vision system for automatic date grading using digital reflective near-infrared imaging[J]. Journal of Food Engineering,2008,86(3):388-398.
[11]展 慧,李小昱,周 竹,等. 基于近红外光谱和机器视觉融合技术的板栗缺陷检测[J]. 农业工程学报,2011,27(2):345-349.
[12]李江波,饶秀勤,应义斌,等. 基于掩模及邊缘灰度补偿算法的脐橙背景及表面缺陷分割[J]. 农业工程学报,2009,25(12):133-137.
[13]李江波,饶秀勤,应义斌. 水果表面亮度不均校正及单阈值缺陷提取研究[J]. 农业机械学报,2011,42(8):159-163.