线阵CCD图像两种直线拟合边缘检测方法比较研究
2015-08-04余皓等
余皓等
摘要: 对线阵CCD图像边缘检测的直接直线拟合法和基于梯度算子直线拟合法进行了比较研究。利用线阵CCD对线材目标进行宽度测量,并分别用两种方法对采集目标图像进行边缘位置检测。经检测得到,直接直线拟合法和基于梯度算子直线拟合法的检测精度分别为0.579%和0.039%,标准差分别为0.037 mm和0.169 mm。结果表明,直接直线拟合法精度较低,但稳定性较好;基于梯度算子直线拟合法精度较高,但结果容易受到随机噪声的影响。
关键词: 测量; 线阵CCD图像; 边缘检测; 最小二乘; 直线拟合
中图分类号: TN 206文献标志码: Adoi: 10.3969/j.issn.10055630.2015.03.017
Abstract: Least squares linear fitting method can be divided into two kinds:the direct linear fitting method and the linear fitting method based on the gradient operator. Principles of both methods were compared, and the results were validated by the experiments using the linear CCD to measure the width of the wire rod. The results of the experiment show that the precision of the direct linear fitting method is 0.579% and the standard deviation is 0.037 mm, and the precision of the linear fitting method based on the gradient operator is 0.039% and the standard deviation is 0.169 mm. Results of the experiment shows that the direct linear fitting method has better stability and larger error while the result of the linear fitting method based on the gradient operator is sensitive to the random noise but it is much more accurate.
Keywords: measurement; linear CCD image; edge detection; least squares; linear fitting
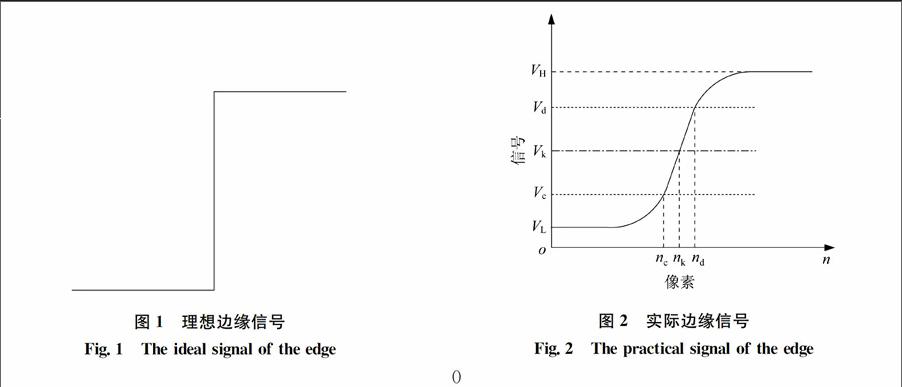
引言在线阵CCD检测系统中,一维图像的边缘检测是关键,图像的边缘检测结果直接影响着系统的检测精度[12]。基于最小二乘的直线拟合方法是一种非常有效的边缘检测方法,其算法原理简单,检测精度高,能达到亚像素级别,且具有检测速度快、容易在硬件上实现等优点[35]。根据选取直线拟合对象不同,直线拟合方法分可为直接直线拟合法和基于梯度算子直线拟合法。其中,直接直线拟合法的拟合对象是图像边缘区域中间较直的部分;基于梯度算子直线拟合法则是先利用梯度算子寻找出粗略边缘位置,再以该粗定位为中心,在拟合领域内对称选取相邻像素点作为拟合对象。本文分别介绍了两种不同直线拟合方法的数学原理,并分析比较了其边缘定位方法,而后通过实验对分析结果进行验证,实验结果表明:直接直线拟合法检测结果误差较大,但稳定性较好;基于梯度算子的直线拟合法边缘定位更准确,但检测结果容易受到随机噪声干扰。1直接直线拟合法理想的图像边缘信号是一个阶跃函数,如图1所示。而在实际采集中,由于存在像差和衍射效应,实际的边缘存在一个逐渐变化的过渡区,如图2所示。
直接直线拟合法是通过设定上下阈值Vc与Vd(Vc与Vd是选择图像边缘信号中直线性较好的部分区域的两个边缘对应的灰度值),截取边缘过度区中间线性度较好的部分作为拟合窗口,对拟合窗口nc至nd(nc与nd表示Vc与Vd所对应的线阵CCD像素位置)之间的所有像素点灰度信息进行最小二乘直线拟合,如图2所示,其中Vc=VL+0.25(VH-VL)
可以解得边缘拟合窗口的拟合直线方程V(n)=tn+r的两个参数t与r。设置阈值点Vk=0.5(VH+VL)(Vk表示利用直接直线拟合法求解得到的图像边缘点处的像素灰度值,用阈值Vk截交拟合直线得到交点xk,即txk+r=0.5Vk,则图像边缘点位置为xk=[(VH+VL)-2r]/2t(5)式中:VH为图像边缘区域灰度最大值;VL为图像边缘区域灰度最小值。2基于梯度算子的直线拟合法由边缘成像原理可知,对一般测量系统而言,如果它的传递函数是对称的,那么输出信号的导数最大值所对应的位置,就是输入线宽函数的边缘点[6]。由于CCD测量系统的传递函数是对称的,根据边缘成像原理,线阵CCD图像的边缘即为过渡区中灰度变化斜率最大值所在位置[78]。线阵CCD采集得到的数字图像是离散量,其梯度幅值为R(i)=f(i)-f(i-1),利用梯度算子寻找出梯度最大值,假设在i,i+1两像素之间,该处即为图像边缘粗定位。
计算出a、b两个参数,即可得出拟合直线。选取梯度最大值两点i与i+1灰度值均值ye作为阈值,ye=yi+yi+12(9)阈值与拟合直线的截点即为图像边缘点,其中xe=ye-ba(10)3检测原理对比对两种直线拟合方法进行比较研究,发现其原理不同:(1)拟合对象不同直接直线拟合法是通过设定阈值,选取边缘过渡区中线性度较好部分作为拟合窗口,对拟合窗口内所有像元点进行直线拟合。这种拟合方法由于选取拟合点数较多,能够有效避免单个像元点上噪声对测量结果的影响。基于梯度算子的直线拟合法是在梯度算子求出图像边缘粗定位的基础上,以边缘粗定位i点为领域中心,对称选取4个像素点,对5个像素点进行直线拟合,这种拟合方法的拟合对象更准确,计算量小,但由于是选取单独像元点进行拟合,其测量结果容易受到单个像元上噪声的影响。(2)选取边缘阈值点不同直接直线拟合法在得到拟合直线方程后,以边缘信号最大与最小值的均值作为阈值点,求取图像边缘位置,这种边缘位置确定方法存在较大的不确定性,因为多数情况下图像边缘过渡区并非完全对称分布,边缘的位置也不一定在边缘过渡区的中间,因此可能导致测量误差。基于梯度算子的直线拟合法是在梯度算子寻找出图像边缘粗定位的基础上,以梯度最大值两点i与i+1灰度值均值ye作为阈值,求取图像边缘位置。根据边缘成像原理可知,这种边缘阈值选取方法更准确,测量结果也将更贴近真实值。
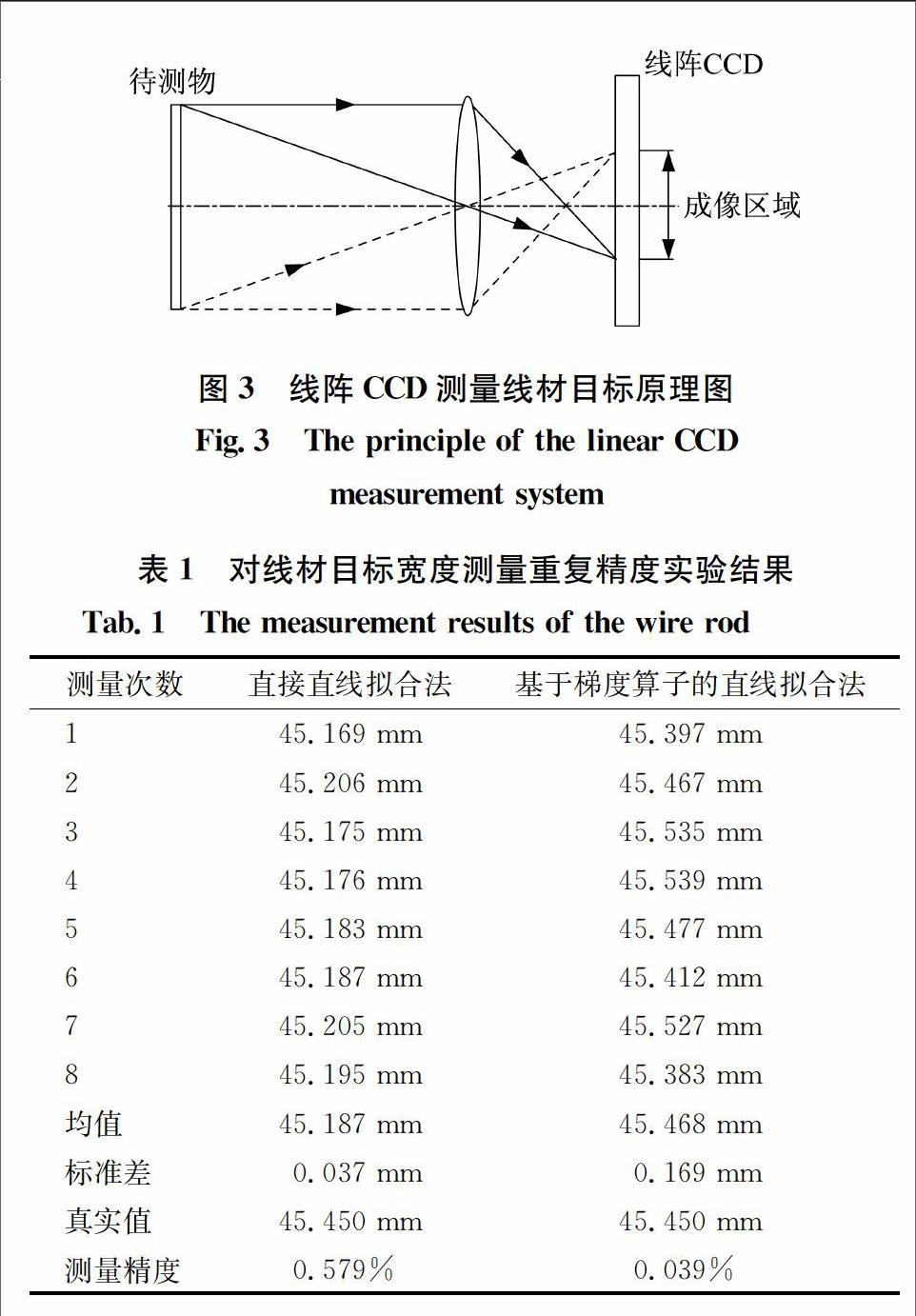
4实验与结果分析利用线阵CCD对线材目标进行宽度测量,其工作原理如图3所示。在对采集数据进行平滑抑噪预处理后,分别采用两种不同直线拟合方法检测目标一维图像的两个边缘,从而得到目标像宽,根据成像公式1l+1l′=1f与物像关系,计算出目标宽度测量值。实验在精密光学导轨上进行,采用TCD1501D型线阵CCD,镜头焦距为50 mm。利用千分尺测量线材目标的宽度为45.450 mm,将该测量值看作真实值,利用线阵CCD对目标重复测量8次,测量结果如表1所示。由表1测量结果可以看出,两种边缘检测方法均可实现亚像素边缘定位。其中,直接直线拟合方法的测量结果与真实值差值为0.263 mm,测量精度为0.579%,测量标准差为0.037 mm;基于梯度算子的直线拟合法测量值与真实值相差为0.018 mm,测量精度为0.039%,测量标准差为0.169 mm。可见,直接直线拟合法测量偏差较大,测量结果稳定性较好;基于梯度算子的直线拟合法测量精度更高,测量稳定性较低。同时,由于基于梯度算子的拟合点少,因此其计算量较小,计算速度快。上述结果的原因是直接直线拟合法拟合对象为整个拟合窗口中全部像素点,减小了单个像素点上噪声对测量的影响;而基于梯度算子的直线拟合法是选取以粗定位为对称中心的单独像素点进行直线拟合,受单个像素点上噪声影响较大,因此直接直线拟合法测量结果更为稳定。在选择边缘阈值时,直接直线拟合法是以边缘过渡区灰度最大最小值的均值作为阈值点,不能准确表示图像边缘位置;而基于梯度算子的直线拟合法,则是在梯度算子粗定位的基础上,选择梯度最大值点i与i+1灰度值均值ye作为阈值,由边缘成像原理,其边缘定位更加准确,因此测量结果误差较小。
5总结本文分别对直接直线拟合法和基于梯度算子的直线拟合法的数学原理进行了介绍,并对两种边缘定位方法进行了比较分析,通过实验对分析结果进行了验证。实验结果表明:直接直线拟合法检测稳定性好,但误差较大;基于梯度算子的直线拟合法边缘定位更准确,但测量结果容易受到单个像元上噪声的影响。今后将通过选取多组对称点求平均的方法对基于梯度算子的直线拟合法进行优化研究,以提高其检测稳定性。参考文献:
[1]尚学军,何明一,王军良.基于线阵CCD的光斑定位算法研究[J].激光与红外,2008,38(7):730731.
[2]倪小芳,吴平辉.利用线阵CCD对物体尺寸测量的研究[J].光学仪器,2011,33(6):1113.
[3]刘奋飞,赵辉,陶卫.改进的直线拟合线阵CCD图像边缘检测方法[J].光电工程,2005,32(3):4043.
[4]李东晶,董建民.基于CPLD和线阵CCD的直径测量系统[J].光学仪器,2010,32(4):6770.
[5]俞巧云,邢晓正,胡红专,等.直线拟合方法在一维图像边缘检测中的应用[J].光电工程,2001,28(6):5658.
[6]杨博雄.CCD 细分技术及其应用研究[D].北京:中国地震局地球物理研究所,2005.
[7]辛德刚.基于线阵CCD的精确测量系统的研究[D].哈尔滨:哈尔滨理工大学,2007.
[8]翟青涌,黄建国,程玉华.基于梯度算子的线阵CCD图像边缘检测方法研究[J].测试测量技术,2009(10):13.
(编辑:张磊)
