自动离合器起步控制研究
2015-07-30莫舒玥
莫舒玥
(广西交通职业技术学院,广西 南宁 530023)
0 引言
目前市场上汽车用变速器有两种:(1)手动变速器,价格较低,但驾驶的舒适性和安全性不够好;(2)自动变速器,舒适性高但价格较高。对于价格低廉的微型车,多数运用手动变速器,而很多新手第一辆练手的车恰好就是价格不高的微型车,可是车主多数又是新手,车技不是很好,所以手动变速器的车型搭配一个自动离合器可以实现价格不贵就能用上智能半自动变速器的心愿。
自动离合器英文名称为Automatic Clutch System[1],英文缩写为ACS。ACS自动离合器是在常见的手动变速箱MT基础上,驾驶员不需要再踩踏离合器,根据驾驶员意图自动实现离合器分离与接合,仅仅只需要手动换档操作即可。ACS的优势在于,对于价格比较低廉的手动挡车型,如果车主想改变全手动换挡的模式,增加驾驶的舒适性和安全性,可以通过加装一套自动离合器的方法实现。与手动档车型相比,即为对传统离合器加装一套自动控制系统,让驾驶操控更为简单也更安全;提高了变速器的相应速度,提高了驾驶舒适性。加装一套自动离合器控制系统,只需要进行简单的改装,价格低廉,1 000~2 000元即可实现,而且与自动档车型相比,具有造价便宜、维修经济、省油的特点。如果自动离合器控制系统出现故障,离合器还是保留人为控制(脚踩)的方式来接合或分离,提高行车安全性,避免造成安全隐患。
1 研究内容和方法
1.1 国内外研究现状
目前国外采用自动离合器的手动变速器已经在一些品牌的车型上运用,如奔驰A190、C230,国内的比亚迪部分车型、东风景逸等车型、部分华晨中华车型等,可见这个技术在一些小型车或微型车上运用的较多。这种类型变速器称之为AutomatedManual Transmission,即为AMT[2],中文含义为“自动控制手动变速器”。而ACS又是AMT系统中的一个重要功能模块,AMT的控制实际上就是实现对ACS的控制,所以,自动离合器的研究对促进AMT的发展具有重要的理论和现实意义。
1.2 研究的问题
ACS具有广阔的市场,因此近年来一直是研究开发的热门课题,但其接合过程的冲击度控制还不是非常完善,一定程度上影响乘坐的舒适性。例如,结合点的把握、结合过程的冲击控制等都是目前需要解决的问题,因而本文将对此进行研究与探讨。
1.3 研究内容与方法
本文主要研究自动离合器的控制方面,且主要针对车辆起步是自动离合器的控制,实现能够根据驾驶员意图平稳快捷地起步,且该过程的冲击度和摩擦都尽量小,如何制定有效的控制策略是离合器起步控制的一个难点[4]。本文重点研究的方法是采用一种科学的多模控制方法来实现自动离合器的控制。本项目基于广西教育厅科研项目《汽车自动离合器技术研究与系统开发》(项目编号LX2014574)完成研究,并根据研究结果撰写本文。
自动离合器性能是否优良是通过冲击度和滑摩功两个指标来进行评价。(1)离合器接合过程中主从动盘接合瞬间由于转速不一样会产生一定的冲击,这个冲击表现为有一定的顿挫感,从而影响到车辆起步的平顺性,使得乘坐人员产生不舒适的感受。而且冲击度过大,使得零部件之间的撞击力增大,加速零部件的损坏,缩短零部件的寿命,同时由于控制时机不好还有可能引起汽车起步熄火。(2)离合器主从动盘之间从分离到接合是从两者之间有转速差到转速一致的过程,当两者转速不一致时,两者是靠摩擦来达到转速一致的,这个过程依靠摩擦作用来传递动力,所以离合器接合过程实际上就是主、从动盘之间摩擦力矩传递的过程,有摩擦必然就产生热量,热量在此过程中就会被损耗掉,同时摩擦产生了磨损,摩擦时间越久,转速差越大,摩擦损耗就越大。为评价由于摩擦而引起的摩擦损耗,引入了滑摩功。滑摩功所反映的是离合器在接合过程中机械能转变为摩擦热损耗能量的多少,滑摩功数值越大,表明机械能转变为热能的损耗越大,发热越多,磨损也越严重,其使用寿命越短[4]。
从以上分析得知,自动离合器接合控制的理想目标是冲击度和滑摩功均越小越好[5]。但实际上这两个指标却是相对矛盾的,即想要减少摩擦损耗(滑摩功),则必须让离合器接合速度缩短,但接合过快将导致冲击度增加,顿挫感增强,影响到起步时乘坐舒适性,而且冲击度的增加也会使得零部件受到冲击的影响缩短寿命,同时车辆还容易熄火;如果想要减小冲击度,离合器的接合速度就要减缓,这就使得滑摩功会增大,摩擦损耗增加,零部件使用寿命缩短,同时使车辆起步时间变长。因此,寻求一个合适的平衡点,制定一个科学合理的控制策略来解决冲击度和滑摩功的矛盾是离合器控制的关键[5]。
目前,对自动离合器结合点的大部分研究都是在保证车辆起步和换挡要求的前提下,根据离合器接合过程的一般特点采用“快-慢-快”的接合规律和模糊控制技术来实现的[6]。本文基于多模控制理论,对自动离合器接合规律进行多模控制策略研究及试验。
2 自动离合器起步控制研究及试验
2.1 起步多模控制研究
由于起步过程中离合器的工作状态同时受到驾驶员起步意图,路面状况,车辆负载情况等因素的共同影响,针对这些因素获得的精确的数学模型却无法共同进行车辆起步过程中离合器接合过程的控制,因此必须将这些影响因素的精确数学模型进行模糊化,设计出多模控制系统,其设计原理如图1所示。知识库代表的是驾驶员起步意图、路面状况,车辆负载情况等因素获得的精确数据,但是必须将其进行模糊化,才能进行模糊推理以及模糊化化控制,最终实现对控制目标离合器的模糊化控制。

图1 模糊控制原理图
针对控制目标(冲击度和滑磨功最小的平衡点)以及离合器接合过程的特点,采用“快-慢-快”接合原则。根据研究可得,可以把离合器的接合过程看成三个阶段:第一阶段,发动机的转矩通过飞轮传到离合器的主动盘,此时主动盘的转速可以近似看成与飞轮一致,此时离合器的从动盘还未与主动盘接触,因此并未转动,这个过程不存在冲击度和滑摩功,为加快接合过程应使离合器以一较快的速度接合;第二阶段,离合器从动盘在主动盘的带动下开始转动,但是此时两者的转速不一致,主、从动盘之间开始产生滑磨,此时应开始减缓接合速度以减少冲击度,提高乘坐舒适性[6];第三阶段,等到机械式离合器主、从动盘转速差低于某一数值后,并实现两者一致,此时动力通过发动机-飞轮-离合器(主、从动盘)-变速器-车轮,车辆实现起步,此过程可以适当加快接合速度,以减少滑摩功,同时提高起步速度。通过“快-慢-快”[3]接合规律实现分段改变离合器接合速度的控制。
由以上离合器起步接合过程分析可以把上述离合器工作的第一阶段看作空行程控制阶段,空行程即为离合器的主动盘转动,但是从动盘还未转动,此时,离合器主动盘没有摩擦力矩;第二阶段为滑磨控制阶段,滑磨阶段主从动盘之间开始接触,但是两者之间转速不一致,但两者从转速不一致到转速一致的过程;第三阶段为同步控制阶段,同步控制是指离合器主从动盘转速一致合为一体,带动变速器工作的过程。根据这三个阶段的特点,选择“比列-模糊-PID”多模控制方式,多模控制系统图如图2所示。

图2 多模控制系统示意图
因此,自动离合器的控制实际上就是通过计算机软件设计一个多模控制程序,再通过自动离合器自动控制系统实现机械式离合器的自动控制目标,取代驾驶员离合器操纵,从而实现汽车起步离合器操纵的自动化。而这个功能只需要一套多模控制程序、直流电动机、离合器操纵机构、电控单元、传感器、线束、显示单元等部件组成的自动离合器控制系统就完全可以实现,且成本只需要1 000~2 000元[7]。
2.2 离合器接合速度模糊控制
汽车在起步时,驾驶员通过操纵油门踏板和离合踏板来使汽车起步,而且在此过程中,油、离合器配合很重要,否则会导致起步冲击过大或起步熄火。试验表明,驾驶员起步意图有慢起步、正常起步和急起步三种情况,一般通过油门开度及油门开度变化率两个参数来表现[5]。因此,自动离合器结合方式的模糊控制可以参考这两个因素进行控制。设计要求必须满足以下要求:若油门开度大,表明驾驶员油门踩得较深,驾驶员的起步意图判定为想急起步,自动离合器控制系统收到大油门开度的信号后,判定为急起步状态,则要求输出指令使执行机构控制离合器尽快接合,以满足车辆较快的起步过程,在此过程中,滑磨功会减小,冲击度会增加,但是会将其(冲击度)控制在合理的范围内,即低于国际上的冲击度限值(最大冲击度为10m/s3,这是最大的舒适性限定值[6]),否则会影响乘坐舒适性;反之,若油门开度小,表明驾驶员想慢起步,自动离合器控制系统收到小油门开度的信号后,判定为慢起步,则要求输出指令使执行机构减慢离合器的接合速度,以满足驾驶员慢起步的意图,在此过程中。滑磨功增加,但冲击度减小,起步比较平稳。另外,踩踏油门速度越快,油门变化率越大,速度越慢,变化率越小。变化率越大,认为驾驶员的起步意图为快起步,变化较慢,认为驾驶员的起步意图为慢起步。如果在驾驶员踩踏油门踏板的时候速度快,则油门开度变化率大[8],反之,则油门开度变化率小。油门开度变化率与油门开度共同反映驾驶员起步意图,计算机多模控制技术将驾驶员的驾驶意图采用模糊控制的方式设计控制程序,实现自动离合器的控制。
另外还需要引入车况(如发动机转速、车速等)。离合器主动盘转速可近似视为发动机转速,从动盘转速经计算可以得到车速,将离合器当前工况和驾驶员意图结合在一起,才能准确反映离合器的接合速度。根据以上因素得到离合器起步模糊控制器如图3所示。

图3 离合器起步模糊控制器示意图
自动离合器系统即在普通离合器的基础上增加一套自动控制系统,取代原来由驾驶员人工完成的离合器操纵,以实现汽车起步、换档离合器操纵的自动化。实现这一功能,自动离合器系统主要由直流电动机、离合器操纵机构、电控单元、传感器、线束、显示单元等部件组成[7]。
2.3 自动离合器起步控制仿真试验
自动离合器系统研制完毕后,与发动机台架和手动变速箱台架进行连接,并与测功机台架连接且进行了实验。本文进行了微型车辆五菱之光在坡度为0°,油门开度分别为20%、40%、70%三个状态下起步(即慢起步、正常起步、急起步)的自动离合器控制仿真实验。绘制出三种状态下的冲击度、滑摩功等曲线图,对比三个状态下的数据,然后对这些数据进行记录、整理与分析,得出本文提出的采用多模控制技术实现驾驶员起步意图的控制合理且可行的结论。
2.3.1 油门开度20%,坡度为0°
在同等载荷情况下,设定平地缓起步的油门开度为20%,地面坡度为0°,离合器的结合过程遵循“快-慢-快”多模控制策略,在主、从动盘开始接触到两者转速同步的过程中,为了提高乘车舒适性减少起步冲击,采用模糊控制适当降低接合速度,当到达同步阶段后,迅速提高离合器接合速度,完成起步。图4为主、从动盘转速曲线,图5为冲击度曲线,图6为滑磨功曲线。主、从动盘在1.8s的时候实现同步,完成起步时间为1.9s,最大冲击度为6.8m/s3,最大滑磨功为8 750N/m。

图4 油门开度20%、坡度为0°主、从动盘转速曲线图
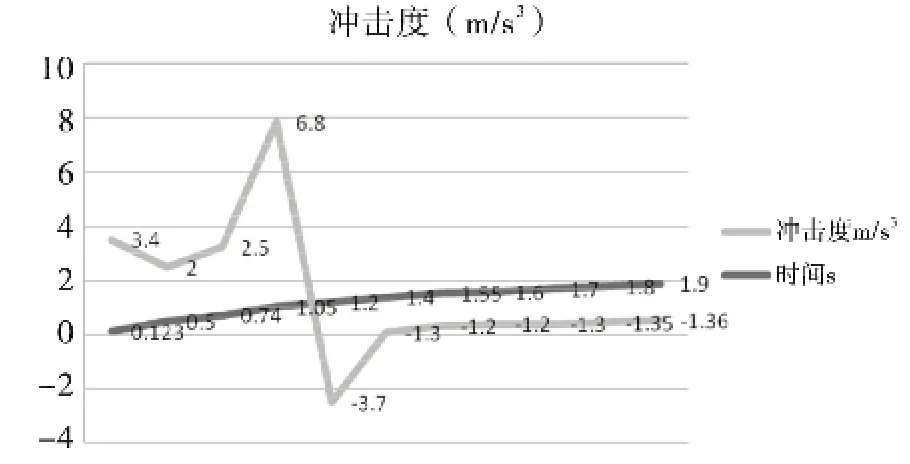
图5 冲击度曲线图

图6 滑磨功曲线图
2.3.2 油门开度40%,坡度为0°
设定油门开度为40%,地面坡度为0°,图7为主、从动盘转速曲线,图8为冲击度曲线,图9为滑磨功曲线。离合器主、从动盘在1.25s的时候实现同步,车辆完成起步时间为1.5s,最大冲击度为5m/s3,最大滑磨功为5 000N/m。油门开度增加,设定的结合速度变快,冲击度也增加,但是由于同步时间变短,主、从动盘因转速不同产生的滑磨功也相应减少。
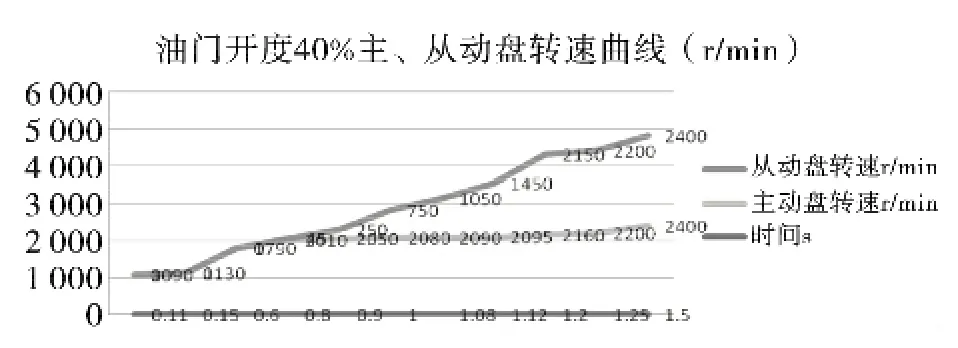
图7 油门开度40%、坡度为0°主、从动盘转速曲线图

图8 冲击度曲线图
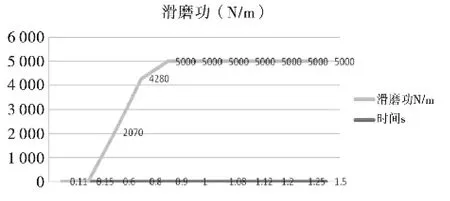
图9 滑磨功曲线图
2.3.3 油门开度70%,坡度为0°
设定油门开度为70%,地面坡度为0°,图10为主、从动盘转速曲线,图11为冲击度曲线,图12为滑磨功曲线。主、从动盘在1.1s的时候实现同步,完成起步时间为1.75s,最大冲击度为18.2m/s3,最大滑磨功为4 000N/m。此时设定驾驶员意图为急起步,主、从动盘同步时间进一步缩短,因此最大滑磨功也进一步下降;但是,由于两者之间的转速差过大,驱动车辆起步的时间反而比正常起步时间稍有延长。

图10 油门开度70%,坡度为0°主、从动盘转速曲线图

图11 冲击度曲线图
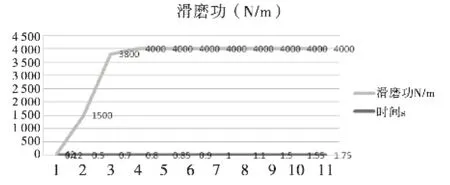
图12 滑磨功曲线图
3 结语
根据实验结果可知,采用多模控制技术实现车辆起步时自动离合器的控制是可行的,试验的结果与驾驶员人工操控机械式离合器的情况基本相同。对慢起步、正常起步、急起步三种情况进行了仿真试验,结果证明离合器在多模控制技术下,基本能实现根据驾驶员意图自动控制离合器,顺利完成车辆起步。
因此,在微型车辆上将机械式离合器改装成自动离合器是可以实现的。不过,车辆的起步过程是及其复杂的,比如在有坡道或车辆负荷变化的情况下,需要更完善的多模控制技术实现控制,这也是下一步需要研究的课题。
[1]童 杰.AMT离合器的起步接合控制研究[D].合肥:合肥工业大学,2011.
[2]夏长高,张 猛,王继磊.AMT汽车起步过程离合器接合控制的研究[J].重庆交通大学学报(自然科学版)ISTIC,2012,31(3):477-481,538.
[3]刁志辉,田晋跃.离合器起步控制策略[J].机械设计与制造,2012(7):171-173.
[4]胡 川.汽车AMT自动离合器控制算法研究及快速控制原型系统开发[D].武汉:华中科技大学,2007.
[5]王旭东,谢先平,吴晓刚,等.自动离合器起步模糊控制[J].农业机械学报,2008(12):18-22.
[6]许 男.自动离合器接合规律及其控制系统研究[D].哈尔滨:哈尔滨大学,2009.
[7]刘 建.AMT离合器控制方法与实验研究[D].南京:南京理工大学,2011.
[8]林文尧.基于模型的AMT自动离合器接合控制研究[D].北京:北京工业大学,2011.
