智能监测船的pH检测的设计与实现
2015-07-25苏祖全徐绍育黎远枝蔡林海
苏祖全,徐绍育,胡 斌,黎远枝,蔡林海
(韶关学院物理与机电工程学院,广东 韶关512005)
智能监测船的pH检测的设计与实现
苏祖全,徐绍育,胡斌,黎远枝,蔡林海
(韶关学院物理与机电工程学院,广东 韶关512005)
摘要:为了提高水域水质检测的实时性和减少成本,实现检测的自动化和智能化.介绍一款基于stm32的智能监测船的设计与实现.设计以STM32F103Z为系统控制核心,通过pH复合电极和DS18B20,对pH值和水温进行检测.系统同时还集成了GPS模块、通信模块等,用于记录船所在位置的经纬度,实现对智能船低成本的智能化控制.
关键词:STM32F103Z;GPS;经纬度;水温;pH值
由于现存的水质监测系统大多采用手工操作的方法,检测数据的代表性比较差,无法真实的反应出水污染的情况并及时发现和定位污染源.因此需要设计一艘水质和水温监测并能自动导航和定位的智能监测船,以下重点介绍pH值检测部分.
1 系统总体设计方案
由于系统算法的复杂性和运算的快速性的要求,选用STM32F103Z作为核心控制芯片,既能满足系统的性能要求又能够降低成本.通过它可以控制各模块的正常工作,以及对采集回来数据进行实时分析处理.并在上位机观察由摄像头采集的图像,对水面的情况进行实时监控.系统总体方案框图如图1所示.
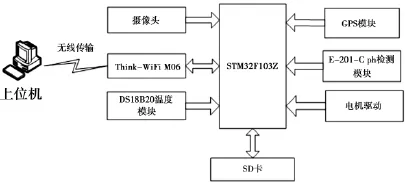
图1 系统总体方案框图
2 系统硬件的实现
整个系统主要分成5部分:电源模块,通信模块,导航模块,电机驱动模块,pH值检测模块.
2.1电源模块
系统的输入电源电压采用直流7.2 V的充电电池.由于各个模块对输入电压的不同,需要+3.3 V、+5.0 V 和7.2 V供电,因此设计用德州仪器公司出产的TPS7333将7.2 V转换为3.3 V和TPS7350将+7.2 V转换出+5.0 V.电源电路如图2所示.

图2 电源模块
2.2通信模块
通信部分使用了Think-WiFi M06,中心频率为2.4 GHz.工作电压为3.3 V,最大电流为170 mA.在空旷的地方,传输距离可达360 m.其接口类型有UART/SPI.传输速度可达54 mbps,且可以通过无线路由器与现有的互联网进行互联互通.
2.3 GPS模块
GPS模块由GPS接收机天线、接收主机和电源组成.GPS接收机的工作是追踪所有的卫星,接收GPS信号,并进行变换、放大和处理,在收到3颗以上卫星的信息时,便可便测量出计算出所在位置的经纬度,追踪到卫星的颗数越多,得到的信息精确度越高.
2.4电机驱动
电机驱动电路的设计出于功率和成本等方面的考虑,用4个功率管IRF3205s构成H桥电路驱动电机转动.电路具有高效率、低电压、大电流的特点,符合系统要求.电机驱动模块原理如图3所示.

图3 电机驱动模块原理图
2.5 pH检测模块的原理及电路设计
2.5.1 pH检测的原理
溶液的pH值由溶液中氢离子的浓度决定,通过测量被测溶液与电极系统构成的电动势,经公式可得到被测溶液氢离子浓度.根据Nernst方程[1](如式1所示)可以算出不同pH值条件下的电极电位数值.

其中R为气体常数8.314 3 J/K·mol,T为绝对温度K,F是法拉第常数,n是电极反应中得失的电子数,E为等电势点的电位,E0是传感器电极在被测溶液作用下的输出电位.

因为Nernst方程与温度有关,在不同的温度下,式(2)中斜率S,截距E均不同.故由上式算出的pH值与温度是密不可分的.我们通常所说的某种溶液的pH值实在特定的温度下的,故温度补偿是不可或缺的一部分.本系统设计温度补偿模块,采用自动温度补偿[2],即程序补偿的方法,对硬件电路的设计减少难度且降低成本.将检测到的实时温度数据t采集到控制芯片中,通过计算求出S后代入式(2)中,经算法的处理,得出相应的pH值.
2.5.2 pH模块的电路设计
由E-201-C pH复合电极的信号电极和参比电极之间的电动势,可求出溶液的pH值.pH值的测量实际上就是电压信号的测量,信号的采集电路是该系统的重点,经实验测得在25℃时,复合pH电极电阻值高达1 011 Ω[3],故高阻抗输入的问题是电路设计的重点和难点所在.
要解决高阻抗输入的问题,则要求运算放大器要具有很高的输入阻抗,E-201-C pH复合电极的内阻可高达1 011 Ω,即传感器内阻低于运算放大器的输入阻抗时,才能使得到的电压信号准确,TLC4502是一款高性能高阻的运算放大器[4],其在常温25℃时,输入阻抗为1 012 Ω.这款运放芯片的供电是单电源供电,对电源部分的要求大大降低了.pH信号处理电路如图4所示.
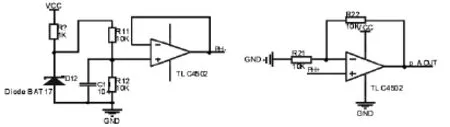
图4 pH信号处理电路原理图
3 系统软件的设计
整个软件系统控制分为三大部分,无线数据传输部分、导航部分和水质检测部分.系统流程图如图5所示.
无线数据传输部分采用WiFi模块,上位机发送指令到下位机,下位机把检测到的数据如经纬度,pH值和实时的图像信息发送到上位机.
水质检测部分是当上位机发出水质检测指令时,下位机通过E-201-C pH复合电极和pH值采集传感器模块检测出水质的温度和pH值.
pH传感器电极输出的信号为两个电极(即信号电极和参考电压)之间的相对电压,系统选用中性溶液对应的电压作为传感器参考电压,即pH值为7的溶液,其对应的输出电压为0,其与情况根据酸碱度不同,输出的电压也随之变化.
室温16℃下,在已知溶液的pH值情况下,测得对应的输出模拟电压,得到了溶液pH值与模拟输出电压线性关系,如图6所示.

图5 系统程序流程图
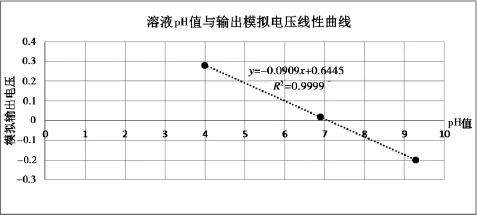
图6 模拟输出电压与pH值曲线图
4 结语
本系统已经将各个部分进行整合,其中水质pH值检测为系统的重点.目前系统的水质监测模块已经完成了测试并已投入使用,对不同pH值的溶液都能很好的监测出其pH值,误差在±1 pH,可以满足系统的要求.
参考文献:
[1]杨素英,尹景鹏,崇仲全,等.pH智能测量技术的研究及实现[J].仪器与仪表学报,2003(10):7-9,35.
[2]杨华庭.具有自动温度补偿的pH测量装置[J].仪器仪表学报,1997,18(4):425-426,429.
[3]周湄生.pH测量中的电极问题[J].中国计量,2000(2):46-47.
[4]康华光.电子技术基础模电部分[M].北京:高等教育出版社,2006.
(责任编辑:李婉)
中图分类号:G434
文献标识码:A
文章编号:1007-5348(2015)08-0027-04
[收稿日期]2015-05-18
[基金项目]广东省大学生创新创业训练计划立项项目(201410576041).
[作者简介]苏祖全(1979-),男,广东韶关人,韶关学院物理与机电工程学院实验师,硕士;研究方向:电机控制、智能仪器设计.
The Design and Implementation of Intelligent Detection of the pH Value of the Surveillance Ship
SU Zu-quan,XU Shao-yu,HU Bing,LI Yuan-zhi,CAI Lin-hai
(Institute of Physics and Mechanical&Electrical Engineering,Shaoguan University, Shaoguan 512005,Guangdong,China)
Abstract:In order to improve the real-time property of water quality detection and reduce the cost,the detection realizs the automatic and intelligent control.This paper introduces the design and implementation of the intelligent surveillance ship based on stm32.STM32F103Z as the system control core of the design,combined with pH composite electrode module and DS18B20 which tests pH value and water temperature.At the same time, the GPS module and communication module are integrated for recording the latitude and longitude of the position of the ship,and the intelligent control of low cost for intelligent ship is realized.
Key words:STM32F103Z;GPS;the latitude and longitude;water temperature;pH value
