基于PLC的远程设备故障诊断方法研究
2015-07-25周律,吴德,查亮,林灵
周 律,吴 德,查 亮,林 灵
(上海理工大学 机械工程学院,上海 200093)
随着控制技术、计算机通讯技术和网络技术的飞速发展,基于这几个技术融合建立的远程故障诊断与维护系统,以其独有的特点成为了故障诊断行业发展的必然趋势。采用远程故障诊断对于制造商和设备使用企业都有着明显的好处,既可为设备制造商减少维护费用、降低职工的劳动强度、提高维修效率;又可为设备使用者减少误工时间、利于控制生产计划。
本文应用的远程故障诊断与维护技术,是指将PLC作为远程现场设备终端信息参数的采集工具,将PLC远程通信模块作为数据的传输工具,基于先进的3G无线通信网络技术,对该数据进行数字化、可视化的处理,然后运用数据解决设备故障诊断和维护的问题。实现这一技术的关键有两部分:一部分是基于网络的无线数据通讯,要解决数据传输的协议解析问题,是技术的基础;第二部分是故障诊断的分析方法或者说是解决方案是如何提出的[1],即在故障诊断时,对获得的数据如何进行处理和分析,然后根据何种方法获得合理的解决方案。
本文内容即针对第二部分的技术关键,提出了基于三种故障分析方式——“专家诊断数据库”、“PLC软元件逻辑寻根法”和“虚拟样机辅助诊断”的有机结合的远程故障诊断法。这三种方式依次递进、不相冲突,有效地解决了故障的分析诊断问题。
1 远程故障诊断法的结构
远程故障诊断法是循序渐进的,诊断系统接收到远程PLC数据后,经过处理,首先与专家诊断数据库中对应的正常范围或正常值进行比较。如果在正常范围内,该路径退出。如果不在正常值范围内,先报警,然后查询专家诊断数据库中的维修记录,找到相关的维修历史记录提供给维护人员。如果查询不到相关记录,就运用软元件逻辑寻根法对故障进行查询[2]。虚拟样机辅助诊断是对软元件逻辑寻根法的一个辅助,它可以使维护人员更直观的参与到设备的故障诊断,大大有助于问题的解决。远程故障诊断法的逻辑图如图1所示。
2 专家诊断数据库
专家诊断数据库是将以往成功的维修记录采集起来,通过建立起“故障信息——故障原因、位置——维护方法”间的数据关系[3],进而实现对远程数据的分析、诊断和处理,以达到远程故障诊断与维护的目的。它汇聚了维护工程师的集体智慧,为顺利进行设备故障的诊断提供了理论和经验上的依据。

图1 远程故障诊断法逻辑图
在故障诊断中,将采集处理后的数据首先与数据库中正常范围的数据进行比较。例如,印刷项目中,“进纸正常”在PLC中对应的软元件编号是“M880”,假定“M880”的正常值是“1”。获得“M880”的值是“0”,将该值与数据库中“M880”的常态值比较。结果发现常态值“1”与实际值“0”不相等,此时报警的同时在数据库中查找历史诊断记录,如果有故障记录则呈现给维护人员,辅助其查找异常原因。
“印刷”项目中为实现远程设备运行安全和维护这一需求,以专家诊断数据库为基础,结合用户权限管理、设备信息管理和维修报告管理这另外三个数据管理服务,构建了系统数据库。选用 Microsoft SQL server作为管理工具,使用Microsoft visual studio作为系统程序的开发平台,选择c#.NET作为程序开发语言所构建的,具体实现了人员信息管理、设备信息管理、专家诊断经验汇聚、设备维护经验数据积累这四项功能。
系统数据库登录界面将所有能够登录的用户分为四类:总工程师、销售工程师、技术工程师和系统管理员。
在网络连接区域内,选定“用户名称”、“设备型号”、“设备编号”之后,点击“连接”,就可以建立同该设备PLC的通讯。
在操作PLC区域可以选择操作的类别,如图2,系统提供了“查看参数”和“修改参数”两种选择。“查看参数”是读印刷机PLC数据的过程,“修改参数”是设置PLC数据的过程。在操作PLC区域,还可以选择操作指令,选择操作指令是选择读取相应单元对应的部件状态,如图3,通过点击下拉按钮,可以选择对印刷设备不同部件状态进行读取。
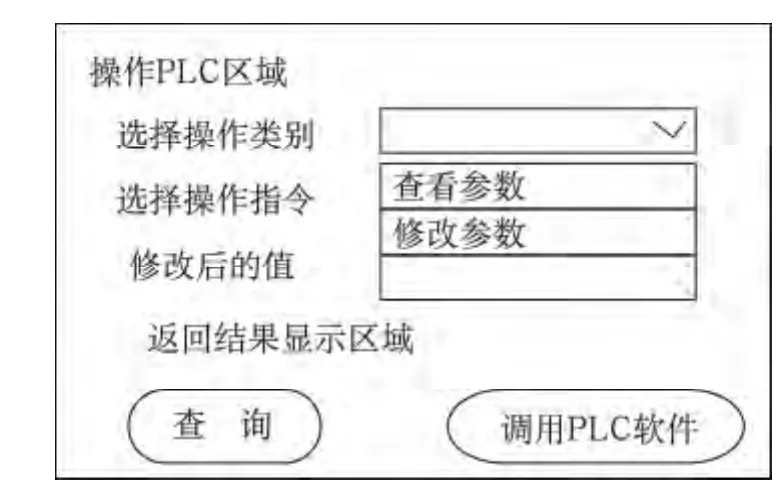
图2 数据库登录操作界面一
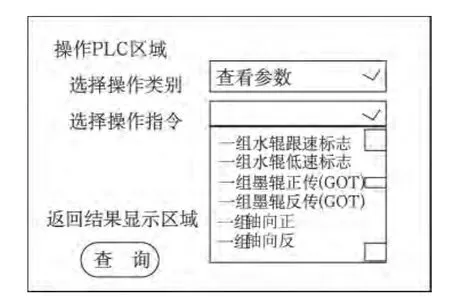
图3 数据库登录操作界面二
建立了同远程终端设备——印刷机PLC之间的通讯连接后,点击“印速”标签就进入设备监控界面,其中,各个项目的内容均是实时的,远程PLC内部的数据即远程设备的实时运行状态参数,点击“故障”标签,就进入实时故障界面[8]。
3 软元件逻辑寻根法
将采集到的实际数据与正常数据比较后,报警软元件的代号会与数据库中的历史维修记录比对,若有匹配的记录,则可以直接查询维修记录,即使用专家诊断数据库。对于没有匹配记录的情况就需要用到软元件逻辑寻根法[6]。
基于这种关联性,提出软元件逻辑寻根法。即在对远程机械设备进行故障诊断时,实时读取寄存器的数据是最直接有效的方法。纵向上看,从假设故障点开始选定三个与该软元件设备有直接关系的软元件设备,然后访问这三个软元件设备的值,并判断该值是否正常。若正常寻找别的假设点,若三个相关联的点有不正常的点,查询专家诊断数据库,看是否有解决方案,如果这个不正常点不足以提供更多的数据信息,那么再在这个不正常点的基础上再找出三个相关的软元件设备,依次循环下去,但最多不超过三个级别。图4在结构上描述了应该注意的事项,为查找与出错软件设备相关的软元件设备,每一个软元件设备的相关软元件设备不超过五个。首先,要在PLC程序中,找出各个关键点或监控点的与其有直接关系的软元件设备。再次,将找到的关系放入数据库中,并建立一定的联系,使维护人员容易查找。最后,对于出错的软元件设备逐次逐个去查找与其有关系的软元件设备的值,有异常值就去追究原因,改正或者提出可行的解决方案,提供给远程设备用户。
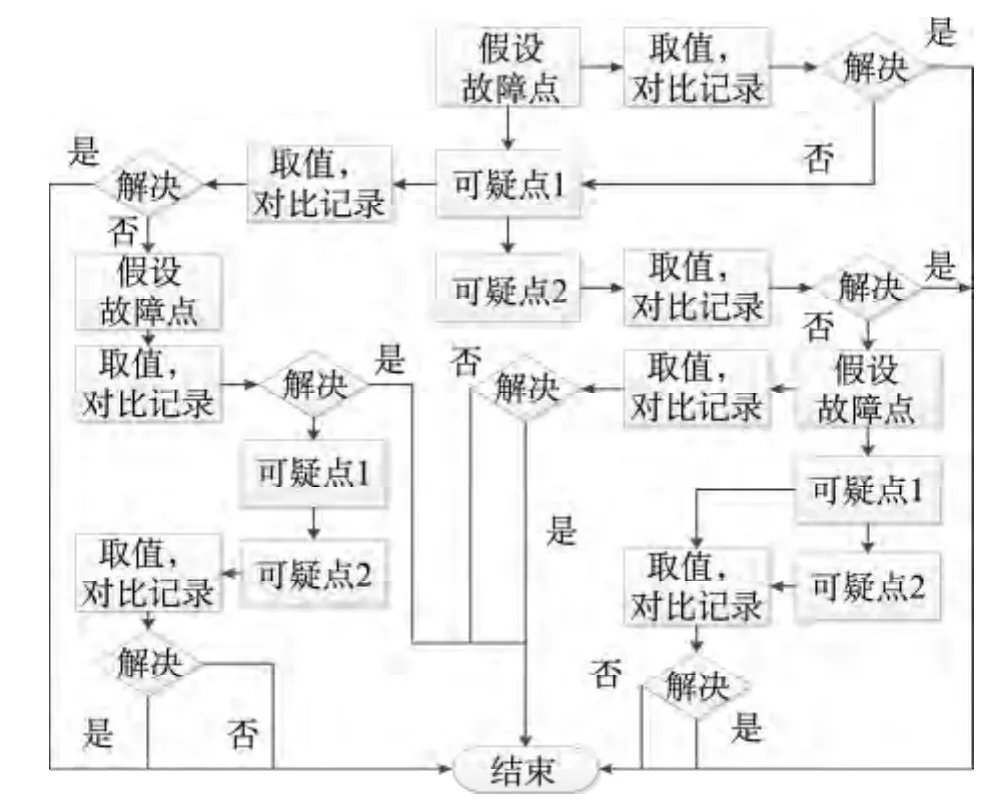
图4 逻辑寻根法结构图
4 虚拟样机辅助诊断
利用前两种方法可以基本实现远程故障诊断,但由于维护人员不能够真实的看到设备的工作环境,不知道现场设备的内部运行状况,所以在进行设备检修时容易忽略掉某些关键的机构关系,特别是对经验较少的维护人员。因此,提出虚拟样机辅助法来解决这个难题[4]。利用虚拟样机辅助法可以实施驱动虚拟样机设备,使远程维护人员直观的看到设备的内部运行状况、理清机械设备内部的机构关系、而且能够大大节省工作人员的劳动强度,提高工作效率。
4.1 虚拟设备样机的建立
虚拟设备样机是实现虚拟设备运行的基础,该方法中所需要的虚拟样机不同于传统的虚拟样机,传统的虚拟样机由于多用于设计阶段或制造仿真,对模型的细节等各方面要求较高,且模型属于静态模型,不能够通过外部数据进行驱动实现相应的动作。本方法中需要的虚拟设备样机建模过程如图5。
同时,在虚拟设备建模时应该注意这几个问题:
(1)构建虚拟几何模型时,要注意模型的命名。虚拟设备最终运动的实现,是通过高级语音或者虚拟交互语言编程控制的,为了便于程序语言的编写,需要对模型的命名进行规范,一般采用有层次的命名方式,并对模型的相关信息进行管理。例如图6:YSJ_YSZZ_YSguntong01(印刷滚筒)
(2)对模型简化处理时,要注意简化得当。
(3)为了增加模型的真实感,需要对零件进行贴图处理。
(4)模型的定位与装配,应遵循实际零部件的相对位置关系。
4.2 虚拟设备样机的动作控制
在进行虚拟设备的动作控制时,同现实中一样,也是通过对虚拟设备的若干个运动单元的控制来实现的。因此要实现虚拟设备的动作控制时就要先讨论虚拟设备动作单元的动作控制。
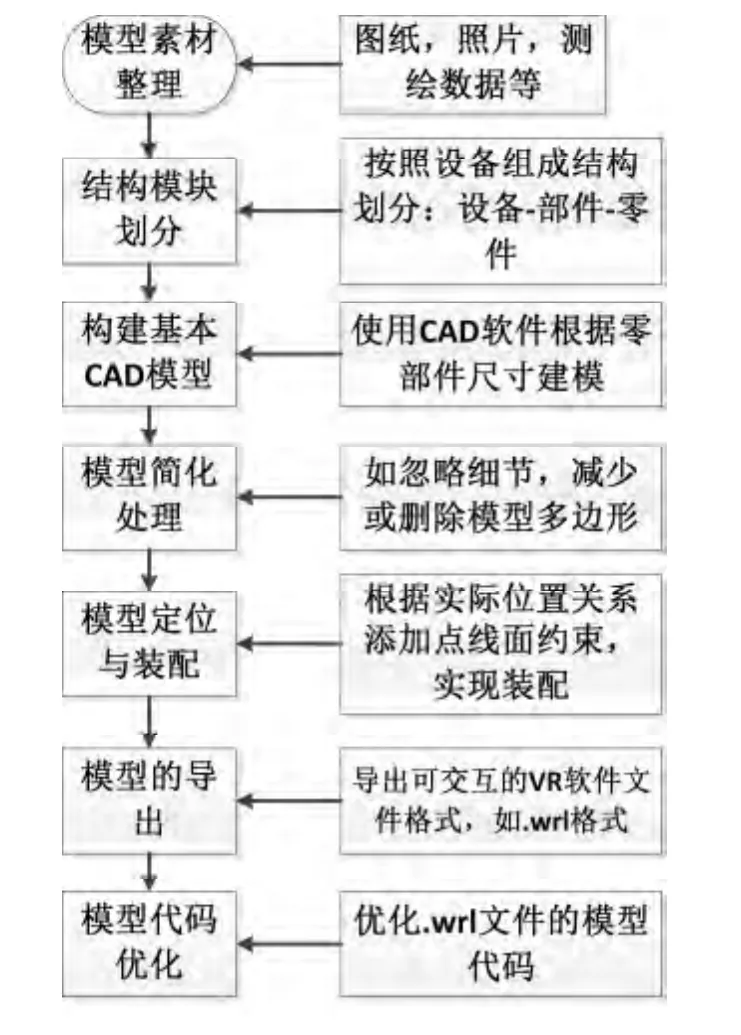
图5 虚拟设备样机的建模流程
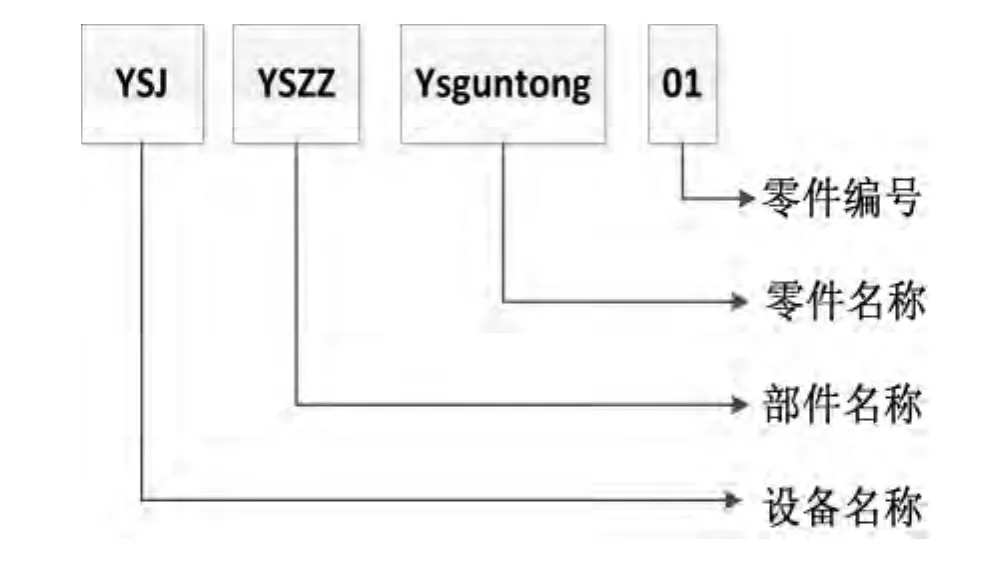
图6 模型命名方式
(1)虚拟设备的动作单元
对于一台现实世界里的机械设备来说,组成设备的基本单元是设备的零部件,整个设备的运行,是各零部件协调运动的结果。对于一台虚拟的运行设备而言也是一样的,虚拟设备各零部件的协调动作,构成了虚拟设备的动作单元。
(2)动作单元在VRML中的描述
不同运动单元的协调运动构成了设备的运行,那么要将实际的设备搬到虚拟空间VRML(Virtual Reality Modeling Language)中,这些运动单元应该如何被描述:在VRML中描述一个动作单元的控制需要涉及到属性节点、动作描述节点和事件路由三个要素。
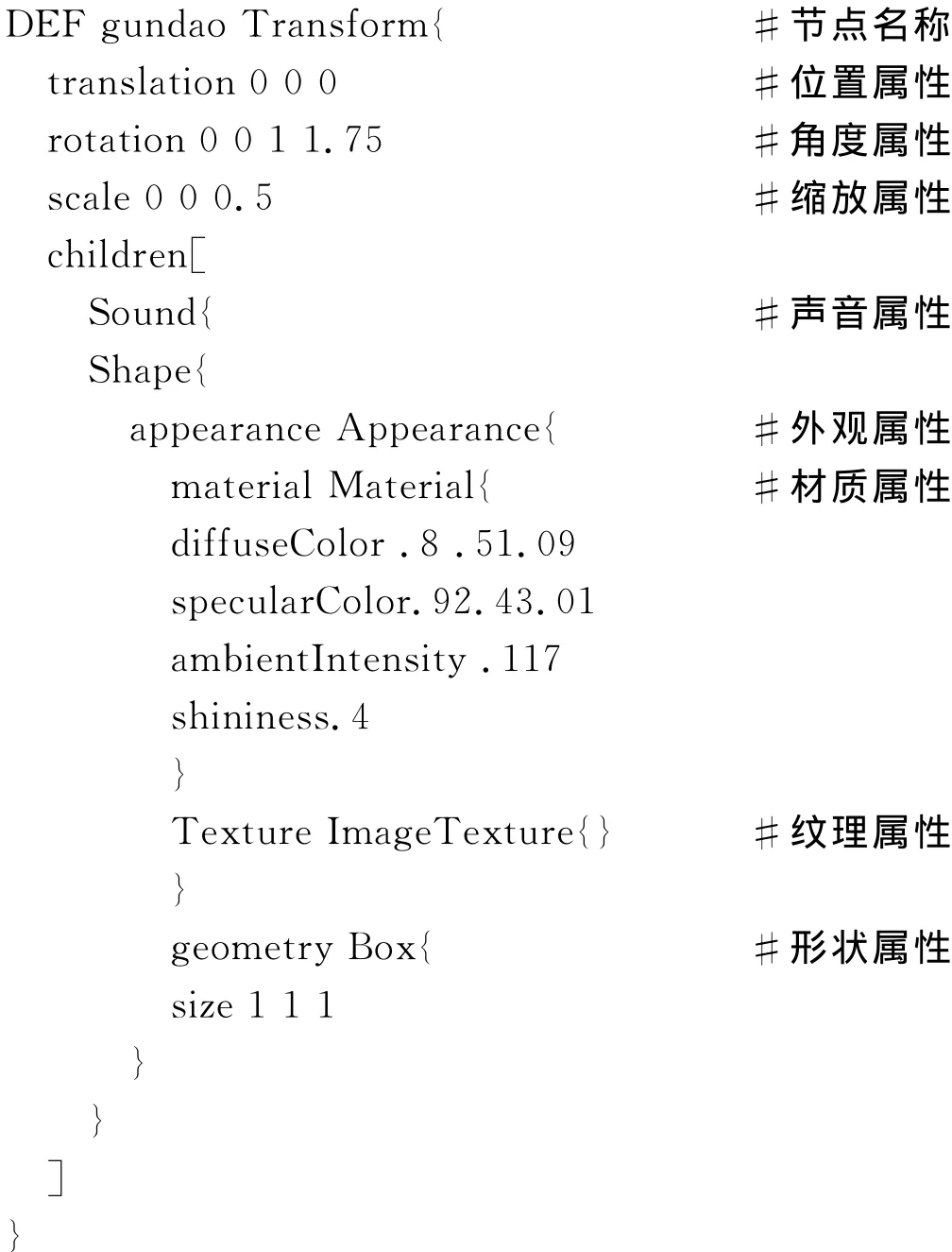
a.属性节点。属性节点主要是指虚拟场景中对象外观、形状、位置等参数的描述。通过改变这些参数,可以实现对象的动作描述,以胶印机滚刀属性节点的描述举例如下:
b.动作控制描述节点。动作单元设计中动作控制的描述通过以下两种方法实现:一种是通过VRML提供的内部感应器与内插器,定义简单动作的控制描述;另一种是通过Script脚本节点编写程序脚本,定义复杂动作控制的描述,语法结构如下:
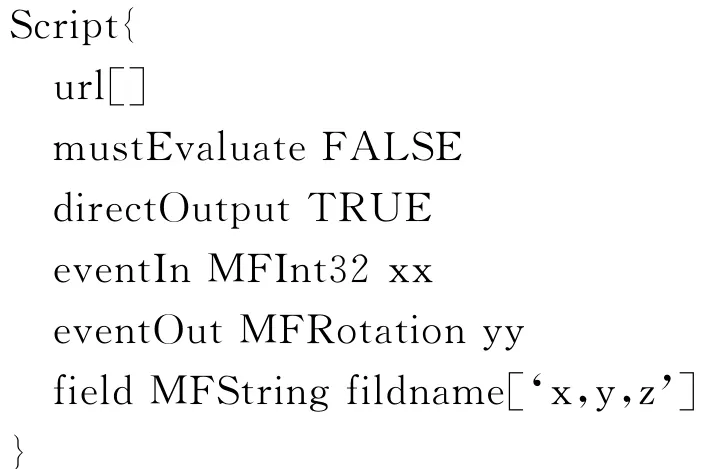
利用程序脚本和Script节点,编写与动作单元相适应的感应器和内插器,就可以创建动作节点,用于虚拟场景中复杂动作的描述。
c.事件路由
一个虚拟对象即使构建了属性节点和动作控制描述节点,其在虚拟空间仍然是静止的,要让虚拟对象按照虚拟动作的设定来进行动作,就需要构造VRML的绑定指令,通过事件路由来控制其动作。VRML绑定包括:绑定在一起的一对节点,以及两个节点间的绑定路由。路由ROUTE的语言结构如下:
ROUTE mouseclick.touchTime TO changecol-or.clicked
ROUTE hangecolor.color TO xx.diffuseColor
以上ROUTE语句表示用鼠标点击事件发出“changecolor”的点击事件,然后“changecolor”颜色的改变值传给xx节点中diffuseColor的属性值,最终使得xx节点的颜色改变。对于一个虚拟设备的事件路由控制如图7。
针对动作单元的动作,使用VRML提供的内部感知器与插补器进行动作描述,与时间传感器相结合,通过脚本节点的定义接收事件控制信号,将事件控制信号的参数变量,经路由到时间感知器的事件,再经过插补器的动作描述,最终经路由到属性节点,控制属性节点属性的变化,进而实现动作单元的动作。
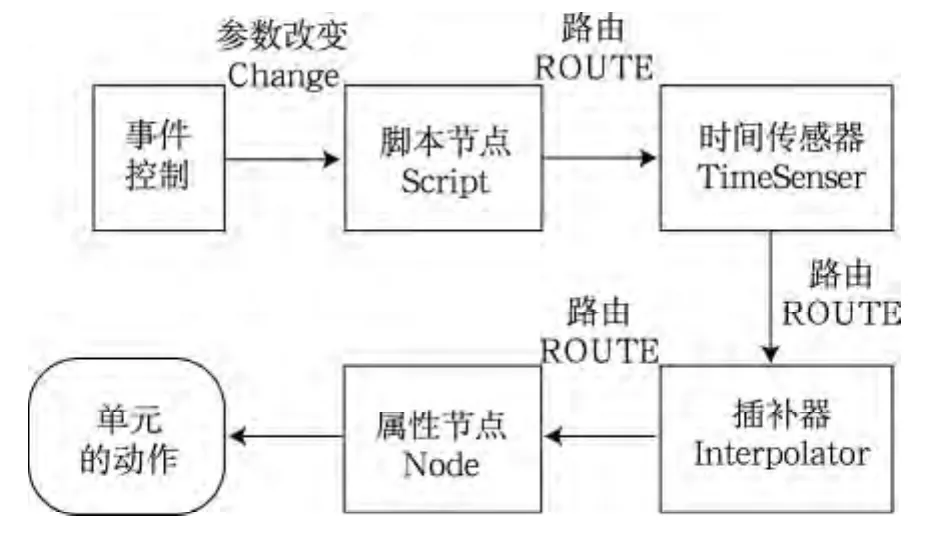
图7 事件路由控制过程
4.3 虚拟设备实时驱动的实现
这里所说的虚拟设备实时驱动包括两种驱动:
第一种是监控中心接收到远程设备的数据,然后通过数据的解析,获取能够反映设备运行的相关参数,例如电动机的转速等,以驱动虚拟设备的运动。第二种是当设备发生故障,通过远程故障诊断能够快速锁定故障发生的位置,并能够实时驱动显示虚拟设备的故障位置,实现故障定位[9]。
(1)虚拟设备运行控制
对于以PLC为控制核心的机械设备来说,能够反映其运行状况的参数为关键控制部位的参数,如电机的转速、编码器的值等,都能直接或间接地反映设备的实际运行情况[5]。但需要了解的是,从远程设备不可能得到虚拟设备所有运动单元所需的数据,实际上得到的实时数据是有限的。为准确的反映设备的运行情况,这就需要研究设备的客观规律,即实时驱动数据到虚拟设备运行间的映射关系。以一台PLC控制的印刷机为例,能反映该印刷机水辊运行情况的参数有:水辊的转速,在X、Y上的进给速度。从PLC上直接获取的数据参数有水辊的转速,X、Y方向伺服电机的转速。这里面存在着映射关系:
a.机床的转速=水辊电机的转速×传动比
b.X方向的进给速度=X方向电机转速×传动比×系数
c.Y方向的进给速度=Y方向电机转速×传动比×系数
通过以上三个关系,只要获取了PLC内部的相关参数,就能够反映出该设备当前的运行状况。在VRML虚拟环境下,通过事件路由的思想,将参数信息传递给虚拟设备单元,控制单元节点的属性变化,从而实现虚拟设备的运动。
(2)虚拟设备故障位置的定位
在虚拟远程故障诊断与维护中,对于一台发生故障的机械设备,要求在进行故障分析的同时,也能够快速定位到故障发生的位置,并能在虚拟设备上显示出来,并用不同的颜色区别出来[7]。由于通过结合专家诊断数据库和软元件逻辑寻根法,可以知道故障位置虚拟设备节点的名称,根据这一对应关系,设置一个新的路由,通过路由改变节点的颜色属性值就可以了。图8即为“印刷”项目中故障点的定位。

图8 故障节点显示
以下的程序定义了ColorInterpolator插补器,还定义了TimeSensor时间传感器,并设置了有效的路由路径,该段程序代码的功能是实现设备颜色的闪烁。在进行故障位置定位时,只需经锁定故障位置节点名称后,执行该段代码。其中“guadao”是假设故障位置节点的名称,可以换掉。通过以上步骤即可为远程故障诊断系统搭建一个虚拟运行平台,在故障诊断的同时利用虚拟设备反映远程终端设备当前的运行状况,并且在系统检测到故障点时,实时在虚拟设备上显示[10]。


5 总 结
通过对远程设备故障诊断方法的研究,列举远程故障诊断方法在实际项目中的应用实例,对提出的三种故障诊断方法进行了详细的论述,并给出三种方法结合使用的逻辑结构,最终证明其正确性和可行性,可以应用于相关的工程项目。
[1] 陈国顺,余达太,刘增良,等.基于虚拟仪器的网络化测试系统设计与应用[J].电子测量技术,2007,03(2):56-59.
[2] 何学文,卜英勇,刘晓波,等.分布式远程故障诊断系统的研究与应用[J].机械科学与技术,2003,04(1):123-127.
[3] 吴 坤,蔡金燕,韩春辉,等.基于专家系统的交互式故障诊断软件研究[J].计算机测量与控制,2011,06(1):78-86.
[4] 金成科.基于虚拟仪器的故障诊断技术研究[D].武汉:华中科技大学,2007.
[5] 张芬兰.远程测试与诊断系统之通用测试子系统的设计与研究[D].西安:西北工业大学,2007.
[6] 代征宇,杨观赐,李少波,等.软PLC逻辑控制元件图形化分析与实现[J].组合机床与自动化加工技术,2012,10(1):74-76.
[7] 魏 坚,张和明,张永康,徐路宁,等.虚拟样机产品信息集成技术研究与应用[J].计算机应用研究,2005,01(1):145-150.
[8] 赵鸿雁,钱若希,李 东,等.印刷机模拟操作软件研究[J].包装工程,2011,11(1):103-107.
[9] 陀 炜,刘佳龙,陈超超,等.基于Virtools的虚拟校园漫游系统的研究与实现[J].计算机与现代化,2012,12(1):48-50.
[10]赵志强,陈 虹.基于虚拟印刷故障培训系统的学习模块研究[J].包装工程,2011,13(1):86-88.
