一种钢水液面精确定位算法的研究
2015-07-24吴云飞刘堂友
吴云飞,刘堂友
(东华大学 信息科学与技术学院,上海 201620)
一种钢水液面精确定位算法的研究
吴云飞,刘堂友
(东华大学 信息科学与技术学院,上海 201620)
RH炼钢工艺中,控制钢水液面高度目前仍采用人工目测的方法,该方法存在一定的缺陷与不准确性。因此本文提出一种钢水液面精确定位算法,该算法采用数字图像处理技术,对图像边缘检测算子进行深入研究,引用一种改进型Sobel算子——8模板各向同性Sobel算子,它能够检测出8个方向的边缘,接着采用霍夫变换、曲线拟合对边缘做优化处理,以此检测出钢水液面的位置。实验研究表明,该算法能够准确检测出钢水液面的位置,为RH炼钢工艺的自动化发展提供重要的理论依据。
边缘检测算法;液面定位;Sobel算子;8模板;RH炼钢
0 引言
准确获取钢水液面位置在RH法炼钢工艺中起着至关重要的作用。传统炼钢工艺中,钢水液面的位置是人为主观地通过肉眼观察来判定是否合适,因此工作效率自然不会太高。为了改进炼钢工艺的不足,人们也尝试着用激光测距、红外测距等方法去判定液面位置,但是由于钢水这种物质本身具有很强的辐射,这会把红外等能量吸收,所以无法判定出钢水液面的位置。因此,本文针对钢水这种物质的特殊性,提出一种利用图像处理技术对钢水液面进行定位的方法。
1 系统结构
RH精炼[1]是目前钢铁生产中普遍使用的精炼手段,该技术具有处理周期短、生产能力大、精炼效果好、容易操作等一系列优点,在炼钢生产中获得了广泛应用。RH精炼工艺通过真空循环脱气装置完成钢水的循环流动,其工作示意图如图1所示。
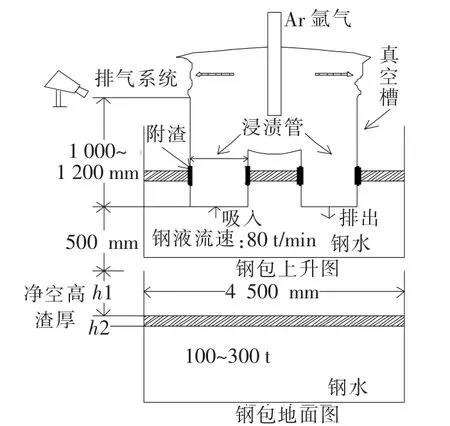
图1 钢水包工作示意图
在炼钢过程中,待处理钢水包将会由行车吊运至RH钢包台车上,钢包台车再将钢包运输到浸渍管下方。此后,钢包将会被设备提升到一定的高度,使得浸渍管下端可以进入到钢渣以下的钢水部分。当真空槽抽为真空时,钢水表面的大气压强与真空槽内的压强差迫使钢水朝浸渍管里面流动。与真空槽相连的两个浸渍管,一个为上升管,另外一个为下降管。由于上升管不断向钢液吹入氩气,吹入的气体受热将膨胀,从而驱动钢水液位不断上升,流经真空槽钢液中的氢气、氩气、一氧化碳等气体在真空状态下被抽走。脱气的钢水由于重力的关系再次经下降管流入钢包,如此不断循环反复。如果液面位置太高,则钢水可能从钢水包里溢出;如果液面位置太低,则钢水无法完成循环过程。因此,将钢水液面高度控制在一定范围内,及时获取钢水液面的位置就显得极其重要。
如图1所示,可以在钢包上侧安装工业相机,以此及时获取钢液液面的图像,然后通过数字图像处理技术来获取钢水液面的位置。图2所示为炼钢厂的钢水包液位图,受容器自身的影响,液位并非一条直线,而是呈近似于抛物线的曲线,而图中的相对距离 d,就需要将其控制在一定范围之内。

图2 钢水包现场示意图
2 算法提出
对钢水液面高度进行定位,其关键是精确地检测出钢水液面的边缘,然而受到外界客观因素的影响,从工业相机获取的图像往往存在着较大干扰信息。因此首先需要对数字图像进行预处理,然后检测边缘精确定位钢水液面高度。
2.1 图像预处理
2.1.1 灰度变换
使用工业相机采集到的图像是彩色图像,彩色图像的信息量较大,其中很多是不需要的。由于信息较多,处理时运算量较大,所以处理起来所需运算时间也就较长。因此,可以通过预处理将彩色图像转换为灰度图像,之后的其他操作都针对灰度图来进行[2]。
2.1.2 图像滤波
获取的数字图像会受到各式各样的外界噪声的影响,例如高斯噪声、椒盐噪声等,所以一般要先去除图像中的噪声。常用的滤波方法有高通滤波、维纳滤波、中值滤波、邻域平均法滤波等。在本次滤波选择中,采用了中值滤波[3]。中值滤波的基本原理是把数字图像或数字序列中的一点的值用该点的一个邻域中的各点值的中值代替。 中值的定义如式(1)所示:

在式(1)中,x1,x2,…,xn为点(x,y)及其邻域的灰度值。
与其他方式的平滑滤波有所不同,中值滤波是将模板对应的像素点按灰度级进行高低排序,取中间值作为输出像素。中值滤波可以在一定程度上克服常用的线性滤波器(例如均值滤波器和最小均方滤波器)所带来的图像特征的模糊,并且对去除图像扫描噪声及脉冲干扰效果较好。本文就是利用中值滤波来达到去除图像中一些噪声的目的。
2.1.3 改进型各向同性Sobel算子提取边缘
边缘检测的思想就是首先利用某一种边缘算子,突出显示图像中的边缘部分,然后定义“边缘强度”,最后通过设立一个阈值,提取到边缘点集合。常用的边缘检测算子有 Sobel算子、Prewitt算子、Laplace算子等。其中,Sobel算子[4-6]对于像素位置的影响做了加权,效果较好,故本研究采用了Sobel算子。
Sobel算子分为两种:普通 Sobel算子和各向同性 Sobel算子。两种算子相比较,各向同性 Sobel算子位置加权系数更加准确。各向同性 Sobel算子的形式如图3。

图3 2模板各向同性Sobel算子
但是,图3只考虑了垂直方向和水平方向。在实际操作中,图像的边缘是有很多边缘方向的,例如 45°方向、135°方向等。于是,在该系统中,将各向同性 Sobel算子增加至 8个方向,如图4所示。

图4 8模板各向同性Sobel算子
通过已经构造的 8个各向同性 Sobel算子模板,分别对图像进行计算,就可以得到 8幅图像矩阵。接着将8次运算结果所得到的最大值作为该点的输出值,便可以得到一幅边缘幅度图像。
8模板各向同性 Sobel算子主要步骤[7]:
设mk(k=1,2,…,8)是 8个 3×3各向同性 Sobel算子模板,n为有 8个元素的整型数组。矩阵[f(i,j)]为等待检测的图像(其中(i,j)表示各像素点的坐标),f(i,j)表示图像在(i,j)的灰度值,w[f(i,j)]为以点(i,j)为中心的 3×3窗口,g(i,j)则是经过边缘检测后的图像在点(i,j)的灰度值输出。 对图中的像素值(坐标为(i,j))进行如下操作:
(1)对于等待处理的像素(i,j),利用模板mk(k=1,2,…,8)和 w[f(i,j)]进行卷积,并将卷积结果的绝对值存入数组元素 n[k](k=1,2,…,8)中;
(2)查找到步骤(1)中所得到的数组 n中所有元素的最大值;
(3)把最大值赋给 g(i,j)作为该像素点的输出值。
2.2 钢水液位线及钢包边缘精确定位
2.2.1 霍夫(Hough)变换检测抛物线
Hough变换[8-9]是图像处理技术中从数字图像之中识别几何形状的基本方法之一,可以用于将边缘像素连接起来得到边界曲线,其主要优点在于对图像中的噪声不敏感,受到边缘间断影响小。 由于要检测的是一条类似于抛物线的曲线, 根据 Ho ugh变换检测原理,可以检测出钢水液位及钢水包边缘曲线。
检测出来的边缘曲线可能不是标准的抛物线,这是由所使用的工业摄像机的拍摄角度和其精度引起的。为此可以通过对检测出来的边缘图像进行适当的几何空间变换,使得数字图像里的曲线变为一条标准的抛物线。
在对图像进行几何转换中,输出的图像中的像素常常会被映射到输入图像中的非整数位置,因此为了确定与该位置相对应的像素值,必须再加入插值运算。插值通常就是使用曲线拟合的方法,通过一些离散的采样点建立一个连续的函数,用这个重建的函数便可以求出任意位置的函数值。
2.2.2 曲线拟合
检测出来的边缘曲线经常可能会有断点并且不光滑,实际应用中希望将断的边缘连接起来,而且连接起来的边缘要光滑。 为此,可以用曲线拟合[10-11]来对检测出来的曲线进行拟合。
2.3 钢水液面定位检测步骤
有了图像预处理和钢水液位线及钢包边缘精确定位的方法,可以列出钢水液位高度的检测步骤,如图5所示。

图5 钢水液位定位步骤
3 方法的应用与实验结果
基于上述精确定位钢水液面的方法,使用MATLAB[12]进行实验仿真。从炼钢生产车间获取钢水液面的图像,由于原图包含的数据量较大,其中有很多无用的信息,在实际处理数据时,只截取了钢包中心区域对其处理,如图6所示,这样速度较快,干扰因素小,效率高。

图6 钢水包中心区域原图
使用文中提及的算法对钢水液位图进行处理之后,效果如图7所示,从图像中可以看出,钢水液面的边缘位置及钢液的边缘位置清晰地展现在图中,文中的算法定位与人眼观察得到的液面位置基本一致。
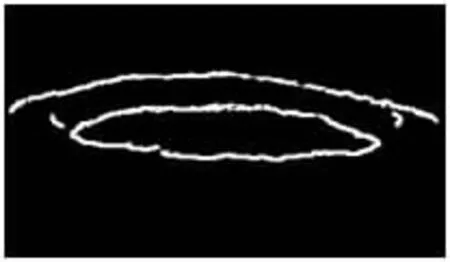
图7 钢水液位线及钢包边缘线
4 结论
人工目测钢水液面位置总会受到主观因素的约束和外界环境的干扰,并且在一定程度上影响了炼钢的效率。本文提出一种快速、简单、稳定的算法来对钢水液面进行定位。实验表明,本文提出的方法可以较为清晰地检测出钢水包及钢液的边缘,将此方法应用到炼钢行业中的钢水液面定位,具有一定的可行性与优越性,可以大大提高炼钢的效率,也会大大推进炼钢自动化技术的进程。
[1]马竹梧.炼铁生产自动化技术[M].北京:冶金工业出版社,2005.
[2]阮秋琦.数字图像处理技术[M].北京:清华大学出版社,2009.
[3]谷口庆治.数字图像处理[M].北京:科学出版社,2000.
[4]胡尚举,田国法,申江波.边缘检测算子的分析比较[J].大众科技,2008(9):48-49.
[5]DENG G.Differentiation-based edge detection using thelogarithmic image processing model[J].Mathematical Imaging and Vi-sion,1998,8(2):161-180.
[6]MOONH,CHELLAPPA R,ROSENFELD A.Optimal edge-based shape detection[J].IEEE Trans.on Image Processing,2002,11(11):1209-1227.
[7]郑英娟.基于八方向Sobel算子的边缘检测算法研究[D].石家庄:河北师范大学,2013.
[8]KALVIAINEN H,HIRVONEN P,XU L,et al.Probabilistc and nonprobabilistic hough transform:overview and comparisons[J].Imageand Vision Computing, 1995,12(24):423-437.
[9]陈燕新,戚飞虎.基于随机 Hough变换的快速圆检测方法[J].上海交通大学学报,1998,32(10):17-20.
[10]焦竹青,熊伟丽,张林,等.基于曲线拟合的无线传感器网络目标定位算法[J].东南大学学报:自然科学版,2008,38(S1):249-252.
[11]WILDES R P.Irisrecognition: an emerging biometric technology[J].Proceedings of the IEEE,1997,85(9):1348-1363.
[12]阮秋琦.数字图像处理(MATLAB版)[M].北京:电子工业出版社,2005.
The research of steel liquid surface precise location
Wu Yunfei,Liu Tangyou
(School of Information Science and Technology,Donghua University,Shanghai 201620,China)
In RH steel-making process,the molten steel level control is still adopt the method of artificial visual,which has faultiness and is inaccurate.This paper is based on digital image processing technology of visual guidance,do the research on the operator of image edge detection,reference to an improved Sobel operator——8 template isotropic Sobel operator,which can detect the edges of 8 directions,then using Hough transform,curve fitting to do optimization on the edge detection,finally detect the steel liquid surface.The experimental result indicates that the proposed method can detect the height of the molten steel surface,which has laid a good foundation for the development of RH steel-making process automation.
edge detection algorithm;liquid surface positioning;Sobel operator;8 template;RH steel-making
TP391
A
1674-7720(2015)23-0001-03
吴云飞,刘堂友.一种钢水液面精确定位算法的研究[J].微型机与应用,2015,34(23):1-3,6.
2015-08-12)
吴云飞(1989-),男,硕士研究生,主要研究方向:多媒体通信与图像处理技术。
刘堂友(1969-),通信作者,男,副教授,博士研究生,主要研究方向:高光谱遥感图像处理与定量反演研究。E-mail:825341170@qq.com。
