大行程纳米定位平台的位移数据采集系统*
2015-07-12孙振宁马树元
孙振宁,马树元
(北京理工大学 机械与车辆学院,北京 100081)
大行程纳米定位平台的位移数据采集系统*
孙振宁,马树元
(北京理工大学 机械与车辆学院,北京 100081)
针对磁悬浮结构的大行程纳米定位平台的位移数据采集问题进行了研究。高精度的位置传感器对实现反馈控制起着决定性的作用,能否实现精确的位置数据传输,决定了是否能够准确地控制纳米磁悬浮平台。为了实现磁悬浮平台准确的数据传输,设计了基于USB传输芯片以及FPGA的数据采集传输系统。采用QEP计数方法,实现了对正交差分信号上升沿的计数工作,通过试验及仿真,验证了电路各模块之间的可行性及有效性,实现了纳米定位平台位移的精确获取。
激光干涉仪;QEP计数;FT245RL;FPGA
磁悬浮结构的运动平台不存在机械摩擦,适用于高速和精密的机械运动机构。磁悬浮系统非接触的特点,决定了其在精密定位和运动中具有独特的优势[1]。近年来, 基于磁悬浮技术的纳米定位平台成为了研究的热点,更高精度和更大行程成为了纳米定位平台的主要研究方向[2-3]。精密定位平台的控制需要高精度的反馈传感信息,能否实现高精度的平台位移信息反馈,是实现位移平台精确控制的关键因素之一。传统的精密位移测量元件[4](如光栅尺和电容测微器等)都无法同时满足本精密定位平台非接触、大行程以及二维测量的精密位移检测要求。
为满足新型平台位移测量要求,采用双轴激光干涉仪作为位移测量元件,并基于数字化控制原理,选用I/O口丰富的FPGA构建数据采集系统。采用QEP编码盘原理,高速处理激光干涉仪输出精密位移测量信号。应用USB传输芯片,使系统通过USB接口完成与PC机的实时通信,大大提高了系统的通用性[5-6],满足了新型大行程纳米定位平台对于精密位移测量的要求。
1 纳米定位平台及位移测量系统
本文所研究的大行程磁悬浮式纳米二维定位平台(见图1),是由Halbach 永磁阵列以及定子线圈组成的4个直线电动机[7]同时提供竖直的悬浮力和水平驱动力。由于永磁阵列磁场的非线性,磁悬浮平台中的电磁力是一种典型的非线性力,而且在竖直方向与水平方向上的电磁力互相耦合,因此精确位移测量信号在控制策略中起着非常重要的作用。
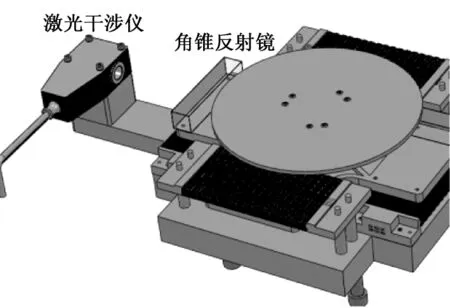
图1 纳米定位平台结构示意图
光栅测量虽然可以实现纳米级精度,但普通光栅尺无法实现二维测量,现有的二维测量光栅尺也无法满足高精度测量的要求,此外,电容传感器也只能在微米级量程范围内保证纳米级精度,无法满足大行程运动平台的要求;因此,为了实现非接触式的大行程纳米级精度的位移测量及快速的数据传输,应采用纳米级精度的激光干涉仪作为平台位移的测量元件。
2 定位平台位移数据采集及传输系统
精确位移测量信号在控制策略中起着决定性的作用,能否完成位移测量信号的传输,是定位平台能否进行精确控制和监视的决定性因素。实时、精确地采集和处理激光干涉仪的数据是实现平台二维纳米运动精度的重要前提。激光干涉仪的分辨率为10 nm,即每经历10 nm的位移,输出1个差分信号脉冲。采用QEP计数方式对脉冲进行计数,为满足平台50 mm的位移需求,计数脉冲的最大值为50 mm/10 nm,约为222,因此脉冲计数寄存器至少为22位,为满足大行程测量要求,配置了24位寄存器。FPGA可以通过编程语言的开发配置为用户所需要的多种功能,为满足本系统中大行程位移传输系统的QEP计数位数要求,选择了I/O口丰富的CycloneⅣ EPC4CE15 FPGA芯片,其最大I/O口为343,主频300 MHz,可以满足位移数据传输系统的QEP计数位数以及实时传输的要求。FPGA模块通过QEP计数方法实现对激光干涉仪正交差分信号的处理,并通过FIFO转USB通信芯片通过USB接口实时上传数据至上位机中,进行数据的处理和观察。系统框图如图2虚线框中所示。

图2 系统整体方案框图
3 基于FPGA的激光干涉仪数据采集原理
激光干涉仪是精确的位移传感器,用来检测磁悬浮平台的XY方向位移。当磁悬浮平台发生位移时,激光干涉仪将输出A、B两相正交差分信号,即位移发生时,2个信号在相位上相差90°,通过这种有相位差信号的个数来记录被测量对象的位移。差分信号如图3所示。

图3 激光干涉仪输出信号示意图
差分信号经过MAX3096ESE芯片转换成TTL逻辑电平,输入到FPGA模块中进行处理。FPGA采用编码盘(QEP)方式进行计数[8]。计数值和激光干涉仪分辨率的乘积即为位移。A、B 两相信号的超前(滞后)关系决定了计数的增减,同时也确定了位移的方向。当正向移动时,A、B两相信号电平变化顺序为00、10、11、01、00循环;当反向移动时,电平变化顺序为00、01、11、10、00,通过检测差分信号的电平变化实现计数工作。QEP计数示意图如图4所示。
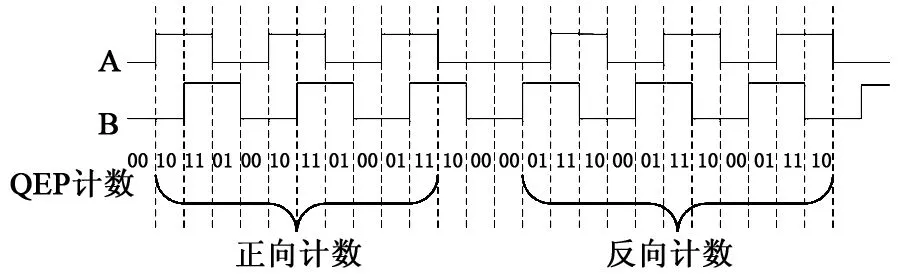
图4 QEP计数示意图
FPGA内部QEP计数模块的仿真结果如图5所示,其中A、B为模拟的激光干涉仪输入到FPGA中的差分信号,QEP_OUT为输出计数结果。本文规定,A相差分信号领先90°时计数值增加,B相信号领先90°时计数值减小。仿真结果中数字按照A、B差分信号的相位先后的增减变化,验证了FPGA中的QEP计数模块的正确性。
4 USB传输电路设计
如前所述,激光干涉仪所测得的位移信号经由正交差分信号输出,FPGA接收后经QEP模块计数,而为了实现数据的进一步处理,计数值还需上传至上位机(PC机),以便于观察平台的位移变化。PC机的USB接口传输目前应用非常广泛,因此FPGA输出的并行数据转USB串行数据传输芯片是该模块的核心[9]。选用FTDI公司生产的FT245RL USB通信芯片,它无需编写片内固件程序,PC机端可使用其驱动程序实现数据传输,传输速率可达1 MB/s。该芯片可以实现USB串行数据格式与并行数据格式双向数据传输,FPGA可以通过并行方式与其进行通信,同时PC机可直接通过USB接口与FT245RL进行通讯,采用USB总线供电的方式,即可实现本系统的数据通信;同时因为使用USB接口直接进行数据传输,大大提高了系统的适用性[10]。其读写模块原理如图6所示。
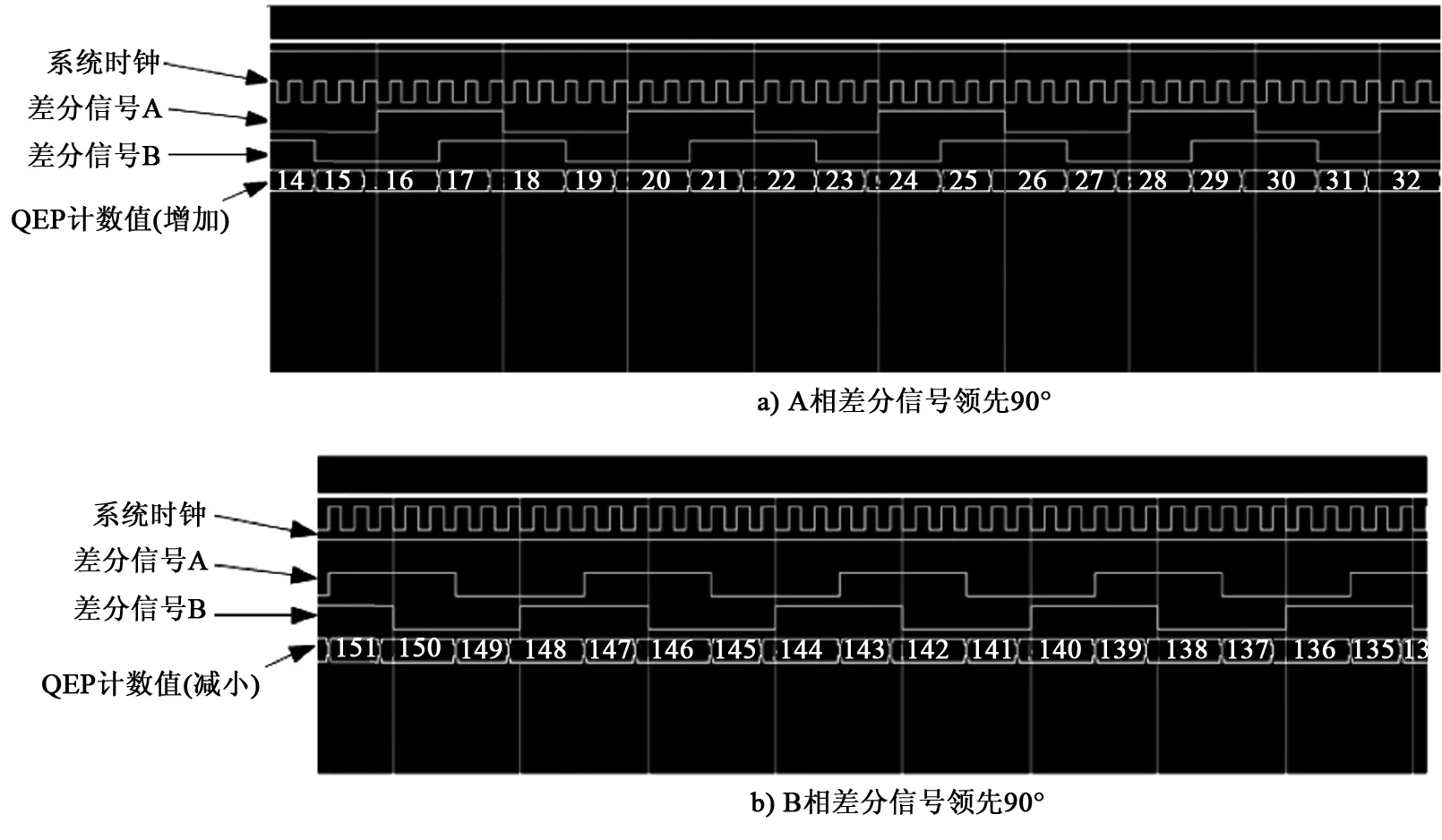
图5 FPGA中QEP模块计数Moeldsim仿真结果

图6 FPGA与FT245RL读写模块原理示意图
FT245RL通过8位并行数据口和4个读写状态控制RXF#,RXF#为FT245RL内部FIFO的满、空标志信号线,RD#和WR分别为FT245RL的读和写标志信号线[11]。为避免在传输过程中可能产生的电流冲击导致FT245RL复位,系统使用了USB6B1芯片作为上位机USB接口与FT245RL芯片之间的数据保护芯片。PC机软件端的结构图和流程图如图7所示。FPGA向FT245RL芯片传输数据的仿真结果如图9所示,可以看到测试数据TX_data_to_usb被准确传输至USB_DATA的数据总线中,验证了FPGA与FT245RL芯片通信的正确性。

图7 上位机软件的结构图和流程图

图8 USB读写模块Modelsim仿真结果
5 激光干涉仪差分信号采集试验验证
激光干涉仪输出的位移信号经过MAX3096ESE电平转换芯片,转换为TTL电平信号后由FPGA进行采集。由于激光传感器精度极高,微小位移变化即可得到输出的差分信号。通过给予反射镜微小位移变化,得到转换的A、B相差分信号在示波器上的波形图如图9所示,可以看到在发生微小移动时激光干涉仪输出的差分信号。

图9 激光干涉仪输出的A、B正交差分信号
通过调用FT245RL驱动程序内的动态链接库,编写USB传输芯片PC端接收程序,得到在给予反射镜微小位移时PC端接收软件显示为一个不断变化的数字(QEP计数值),试验验证了本数据传输系统的正确性。
6 结语
针对高精度大行程磁悬浮纳米二维定位平台精确位移反馈的问题,选择满足平台非接触大量程二维测量的双路激光干涉仪作为位移检测元件,进行了相关QEP计数值及其通过USB进行传输的研究,构建了基于USB传输芯片以及FPGA的数据采集传输系统,传输系统通过QEP编码盘原理对激光干涉仪输出的位移差分方波进行快速准确的计数,并选用FIFO转USB的FT245RL通信芯片将系统检测结果传至上位机中,大大提高了本系统的通用性,满足了激光干涉仪的正交差分信号处理和传输功能,实现了大行程纳米定位平台位移信号的精确测量及传输。
[1] Kim W J, Maheshwari H. High-precision control of a maglev linear actuator with nanopositioning capability[C]. Alaska : Proc. of 2002 American Control Conference, 2002.
[2] 王伟明.磁悬浮式二维纳米定位平台控制系统研究[D].北京:北京理工大学,2011.
[3] Kim W J, Trumper D L, Lang J H. Modeling and vector control of planar magnetic levitator[J]. IEEE Trans. On Industry Applications, 1998, 34(6): 1254-1262.
[4] 孙麟治,李鸣鸣,程维明.精密定位技术研究[J].光学精密工程,2005,11(13):69-75.
[5] Jiang H, Zhou G, Huang X L, et al. Field-oriented vector control and simulation of linear motors with halbach permanent magnets[C]. Wuhan: Power Electronics and Motion Control Conference, 2009.
[6] 党浩淮,赵冬娥.基于FT245RL和FPGA的USB接口设计[J].山西电子技术,2013(4):34-36.
[7] 仉毅,马树元,张磊. 纳米精密磁悬浮二维定位平台的研究[J].微计算机信息,2010(1):1-3.
[8] 欧阳航空,陆林海,侯彦丽.基于DSP的光栅莫尔条纹信号辨向与细分电路研究[J].制造业自动化,2005(5):5-7.
[9] 张嵩,王剑.简易的USB接口开发.[J].湖北工业大学学报,2006,21(3):222-224.
[10] 王留全,焦海恋,安都勋.基于FT245RL的USB接口设计[J].国外电子器件,2008,10(1):10-11.
[11] 蔡江洪,史小军,朱为,等.利用FT245BM实现FPGA与PC机的USB通讯[J].电子器件,2005,28(1):132-134,137.*国家自然科学基金资助项目(60674052)
责任编辑马彤
DesignofDisplacementAquisitionSystemforLongStrokeNano-positioningStage
SUN Zhenning,MA Shuyuan
(School of Machinery and Vehicles, Beijing Institute of Technology, Beijing100081, China)
The key point for a long stroke nano-positioning stage is the accurate positioning, and an accurate displacement aquisition system is very important for feedback control of the long stroke nano-positioning stage. For achieving a high precision data transmission, this paper design a displacement aquisition system based on FPGA and USB transfer chip. By using the theory of QEP counter, the counting of the quadrature signal is done, and by experiment we confirm that this system is viable and valid, so we realize the goal of the achievement of the accurate displacement of long stroke nano-positioning stage.
laser interferometer,QEP,FT245RL,FPGA
TM 935.1
:A
孙振宁(1989-),男,硕士研究生,主要从事大行程精密定位及控制等方面的研究。
2014-10-21
