窨井清掏机械手的液压系统设计与AMESim 仿真
2015-07-11李生保谢振平康俊峰
李生保,谢振平,康俊峰
(内蒙古工业大学 机械学院,内蒙古 呼和浩特 010051)
0 引言
随着城市化的不断加深和城市人口的不断增加,造成城市生活垃圾暴增,这给城市排水系统带来越来越大的压力,常常出现因窨井堵塞而带来的城市排水系统瘫痪。而人工作业排堵效率低、成本高,且窨井恶劣工作环境极易造成工作人员缺氧和中毒,甚至危及生命,所以对窨井清掏机有迫切需求。
窨井下淤积物主要包括生活污水污泥、工业废水污泥、坏的井盖及其它生活杂物,井下工作条件比较恶劣及负载繁重,要求窨井清掏机经常处于起制动状态,具备大负载、抗冲击、大功率和过载保护等能力。这就使驱动机械手的液压系统设计成为重中之重。 机械手是清掏机的主要部分,它由机械手臂和抓斗组成,如图1 所示。

图1 机械手的三维模型
1 机械手的工作状况
窨井清掏机械手的运动主要包括以下几个动作:机械臂的伸缩、抓斗的装卸、机械手回转。液压机械手一个作业循环组成如图2 所示。
2 液压控制系统设计
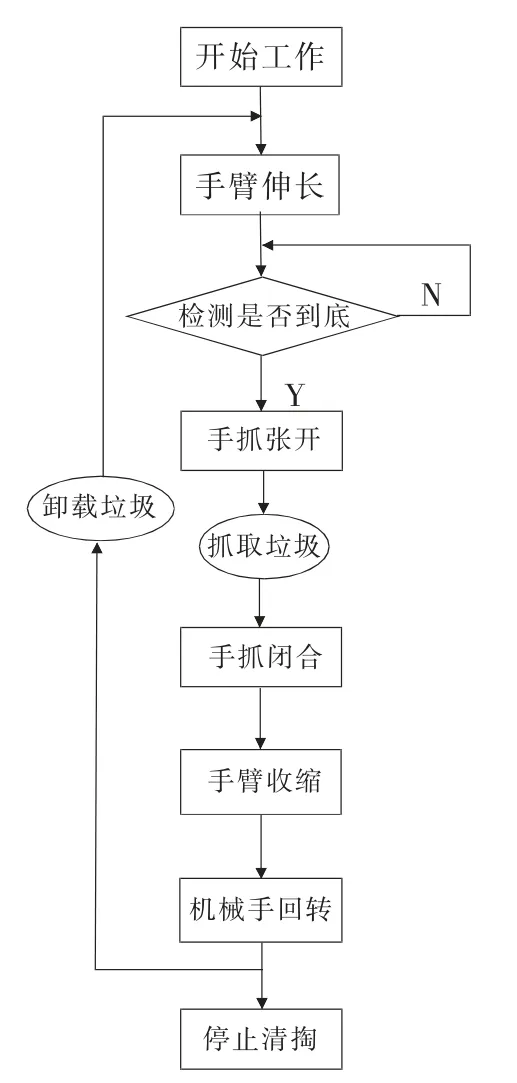
图2 机械手的作业循环图
窨井清掏机械手的液压系统主要用来控制机械臂伸缩和液压抓斗的开闭,采用液压控制方式,具有移动快、结构简单、动力强大、操作方便等优点[1]。
2.1 液压系统的组成
液压系统的主要组成部分包括:液压驱动装置、控制装置和执行装置。 驱动装置采用电动机带动液压泵来提供动力,控制装置采用电磁换向阀来控制液压缸的移动和换向,执行装置为液压缸。
由工况分析可知:油缸的进程和回程速度基本相同,在具体的工作环境下,可能出现负载变化的情况,因此系统要有调速功能,同时为了保证液压系统的运行安全, 采用过载保护装置,并且不同执行装置的工作负载不同,在各回路中要设置减压回路, 以保证各部分工作时所需的压力。按照机械手整个作业循环过程中的要求对机械手的液压系统进行设计,如图3 所示。
2.2 液压系统各元件的选取
这里主要对抓斗液压控制系统各组成元件进行设计和选取,主要包括液压泵、抓斗液压缸、调速阀、液控单向阀和电磁式三位四通换向阀。
2.2.1 液压泵
液压泵是向液压系统提供一定压力和流量的液压动力元件。 根据清掏机械手的工况、功率大小和系统对工作性能的要求,选取齿轮泵CBC。 主要参数:
额定压力:10 MPa
转速:1500 r/min
排量:10 mL/r
2.2.2 液压油缸的选取
液压油缸是抓斗实现张合的执行元件,其选型根据系统的工作压力和工作负载决定。抓斗闭合时需要的最大活塞推力约为19700 N, 工作压力为10 MPa,活塞杆的最大行程为250 mm,根据标准系列选用HSGF01 一50/25BE 一EZ1 型工程机械单杆双作用液压缸。
2.2.3 调速阀的选取
为了保持执行元件(液压缸)工作速度稳定,不受负载压力变化的影响,液压回路中设置了调速阀。抓斗的最大移动速度为25 mm/s,活塞直径为50 mm,液压缸的最大流量为:

根据其最大流量,选取北京华德DV6-1-10型调速阀。 其主要参数为:
流量:20 L/min
压降:0.3 MPa
2.2.4 液控单向阀的选取
为了防止抓斗自重下落损坏液压缸,在液压缸出口处安置了液控单向阀。 北京华德Z2S61-40B 型液控单向阀符合工作要求。 主要参数:
流量:60 L/min
压降:1.5 MPa
2.2.5 换向阀的选取
为实现抓斗工作中的张开与闭合,需选取换向阀对其进行控制。 北京华德4WE4D10B/AG24Z4 型三位四通电磁阀能够满足要求, 工作时,通过电磁铁的控制,实现不同油路的连接与断开,从而实现抓斗的张合。 主要参数:
流量:25 L/min
工作压力:10 MPa
3 液压系统建模与仿真
3.1 液压系统建模
AMESim 软件采用图形方式来描述系统中各元件的相互关系,能够反映元件间的负载效应及系统中功率流动情况,能够更直观的反映系统的工作原理[2]。 参考机械手液压原理系统图创建抓斗液压系统的模型,如图4 所示。
3.2 系统加载仿真
本文仿真分析的侧重点在于借助AMESim的系统仿真结果检查液压系统的原理设计是否合理、液压元件参数选择是否比较准确。 表1 为液压元件的主要参数,对抓斗液压模型进行数据加载,进行仿真分析。

图4 抓斗液压系统AMESim 模型
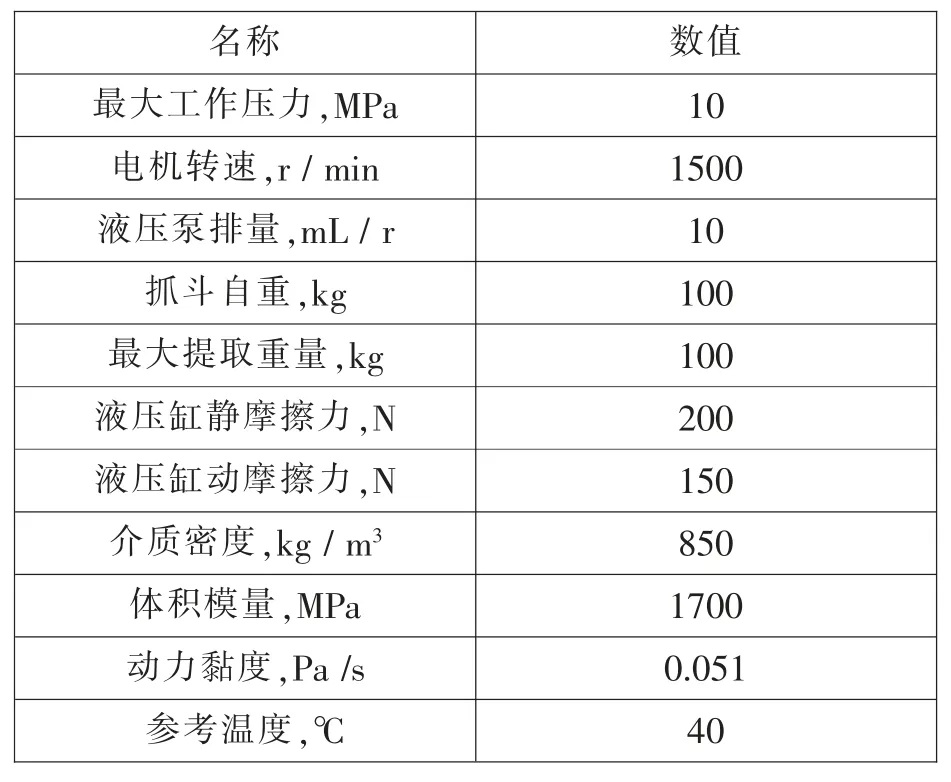
表1 液压系统主要参数
由图5 和图6 可以看出:活塞杆在0~2 s 时,由于有抓斗自重, 泵口0.37 MPa 的压力就可以让抓斗张开; 在2~3 s 时, 此时由于有载荷和自重,泵口2 MPa 的压力可以让抓斗闭合;因为活塞收缩时的活塞杆受力面积小于活塞伸长时的受力面积,所以活塞收缩速度大于伸长速度。 在3~4 s 时,活塞到顶,泵口的压力等于最大工作压力10 MPa。
由图7 和图8 可以看出: 在整个运行过程,液压缸的流速都是趋于稳定的,表明液压缸的运行状态是相当稳定的。 唯有在启动时,液压缸在充油,液压缸流速有些波动,符合实际工作情况。

图5 控制信号
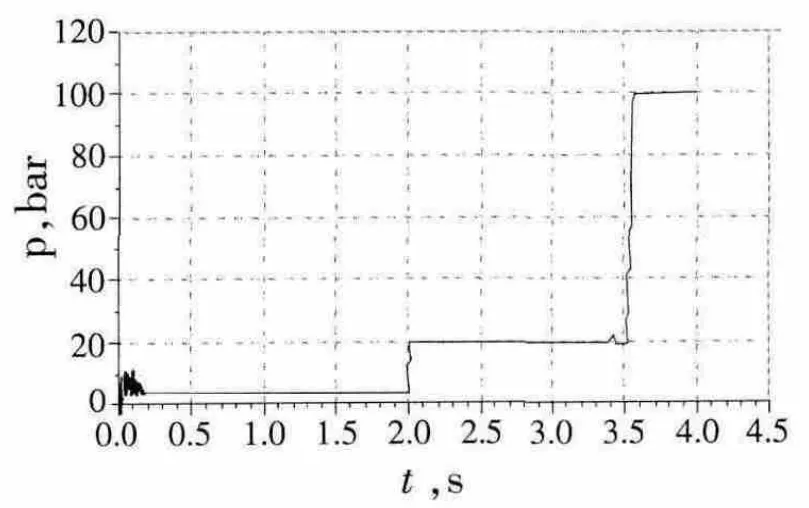
图6 泵口压力

图7 液压缸无杆腔流速

图8 液压缸有杆腔流速
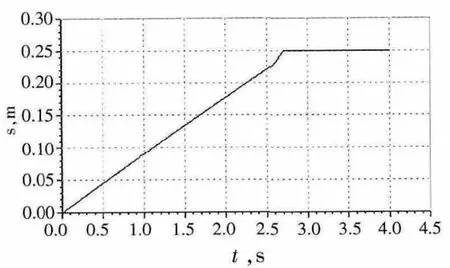
图9 液压缸位移(加液控单向阀)
由图9 和图10 可以看出: 当加液控单向阀时,液压缸不运动;当不加液控单向阀时,液压缸匀速伸长;足以体现抓斗张开后,液控单向阀起到了保压作用,抓斗不会自动闭合,满足了设计要求。
4 总结
通过对窨井清淘机械手抓斗的液压系统模型工况仿真分析得知,该液压系统满足机械手的稳定、保压工作要求。 虽然液压缸在充油过程中的波动在实际工作中是不可避免的,但是可以在液压系统中加蓄能器来给液压缸瞬间大量供油来提高液压缸工作的稳定性。
[1]张久林.工程机械液压行走系统的设计及理论研究[D/R].上海:同济大学.2007:02.
[2]李吉,李华聪.仿真软件AMESim 应用研究[J].航空计算技术,2006:01.
[3]机械设计手册编委会.机械设计手册液压传动与控制[M].机械工业出版社,2007.
[4]何芹,原政军,姚龙元.用于方形物体装卸液压机械手的设计[J].机床与液压,2010,18:38.
[5]王正刚,朱龙英,葛友华等.清理垃圾机械手的设计[J].机械设计与制造,2009:65.
[6]安少军.城市窨井积水井清掏机原理样机的研究[D/R].哈尔滨工程大学,2007:02.