激光陀螺闭环抖动控制技术研究
2015-07-09谭汉清马二杰
谭汉清,马二杰,李 超
(1.海军驻航天某院军代表室,北京 100074;2.北京自动化控制设备研究所,北京 100074)
0 引言
激光陀螺的工作原理以Sagnac效应为基础,在光学谐振腔中相向运行的两束激光的拍频与腔体相对于惯性空间的转动角速率成正比。在激光陀螺工作过程中,当输入角速率小于一定数值时,两束光的频率处于同步状态,从而使激光陀螺无法敏感小的角增量,这种现象叫做激光陀螺闭锁。
激光陀螺的锁区是影响其测量灵敏度的重要性能指标,在激光陀螺的技术发展过程中,缩小锁区及克服锁区的影响是促使其工程化发展的一个里程碑。机械抖动偏频是世界上应用最早的激光陀螺偏频技术,其核心思想是采用小振幅高速机械抖动装置强迫环形激光器绕垂直于谐振腔环路平面的轴线来回转动,为谐振腔内相向行波对提供快速交变偏频。在信号处理过程中消去抖动偏频造成的频差,从而获得与输入信号相对应的输出信号。二频激光陀螺就是利用抖动偏频技术克服锁区,通常采用的方式为基于模拟电路的正弦波抖动驱动方式和基于数字电路的方波抖动驱动方式。模拟正弦驱动的最大优点是谐波小,能量损失小,噪声小;其缺点是控制不灵活。数字方波驱动的最大优点是控制灵活,但谐波太多,噪声非常大。
为了有效地弥补两个抖动驱动方式的缺点,让两者之间取长补短,我们设计了一种数字化的模拟驱动方式,有效地解决了二者之间的矛盾。
1 激光陀螺数字化控制原理
激光陀螺为了克服锁区的影响,需要外界输入与其自身谐振频率一致的抖动驱动信号,当两者的频率相等时,激光陀螺可以保持高强度的抖动,从而减小锁区,在锁区减小的基础上再在抖动驱动信号上加入具有各种性质的噪声,还可以进一步提高激光陀螺的精度。由于每个陀螺的谐振频率都不尽相同,同时谐振频率会受温度、压力等外界因素影响,为了使得激光陀螺始终保持高强度的抖动,输入的抖动驱动信号必须可以跟踪上激光陀螺自身谐振频率的变化。同时根据以往的工程经验,模拟正弦波对激光陀螺的驱动方法在效果上要好于数字方波的驱动方法,但之前基于模拟电路的正弦波驱动方法,一旦电路板设计完成,其所产生的正弦波和其中加入的噪声不可再改变,如果需要在正弦波上调制新的噪声信号改善陀螺精度,只有重新设计投产电路板,很不方便。当前所使用的激光陀螺数字方波驱动方法,通过输出与激光陀螺谐振频率一致的方波的方法来维持激光陀螺的高效抖动,同时利用可编程数字逻辑电路 (FPGA)可以重复配置的特点,当需要修改驱动信号中加入的噪声时,对FPGA重新配置即可,该方面较数字方波驱动方法要方便很多。
本文所提出的控制方法综合了上述两种方法的优点,首先通过在FPGA中产生数字正弦波,然后再利用数字/模拟信号转换芯片将在可编程数字逻辑电路中产生的数字正弦波转换成模拟正弦波驱动激光陀螺,从而达到较好的驱动效果,该功能通过数值控制振荡器 (NCO-Numerically Controlled Oscillator)来实现,当需要修改输出的正弦波上叠加的噪声时,只需要修改FPGA的配置程序即可。对激光陀螺谐振频率变化的跟踪通过全数字锁相环 (PLL-Phase Locked Loop)来实现,通过使用锁相环,使FPGA中所产生的抖动驱动信号的频率和相位可以与激光陀螺的抖动反馈信号自主地保持高度一致。
NCO有实时计算法和查表法等多种实现方式。实时计算法通过实时计算产生周期信号,该方法最大缺点是计算消耗时间长,导致迭代计算时间和计算精度产生矛盾,因此更适合产生低频信号。而查表法是一种简单、快速有效的方法,即事先根据各个NCO正弦波相位计算好相位的正弦值,并以相位角度作为地址把该相位的正弦值数据存储在表中,通过相位累加产生地址信息,读取当前时刻的相位值在表中对应的正弦值,从而产生所需频率的正弦波。由于激光陀螺机抖反馈信号的频率为300Hz~600Hz左右,且机抖反馈控制对实时性的要求很高,所以NCO需要采用查表法实现。NCO模块原理如图1所示。

图1 数控振荡器模块原理图Fig.1 Diagram of numerically controlled oscillator
PLL有着非常广泛地应用,卫星定位导航接收机为了克服卫星与接收机之间由于相对运动而产生的多普勒效应,在载波跟踪环路中广泛地应用了PLL,PLL模块原理如图2所示。卫星接收机自身所复现的载波信号需要不断跟踪卫星信号中载波信号的频率和相位变化,这种应用与我们希望激光陀螺抖动控制程序中产生的正弦驱动信号可以不断自主跟踪激光陀螺的抖动反馈信号的频率和相位的期望一致。将全数字锁相环应用到激光陀螺的抖动控制中还有一个十分吸引人的地方,PLL能抑制叠加到它输入信号上的噪声,机抖反馈信号不可避免地包含着我们人为加入的和由于外界因素带来的噪声,PLL测量机抖反馈信号和机抖驱动信号之间的相位差,输入信号中的噪声使得输入信号的过零点以随机的方式超前或滞后,于是数字鉴相器的输出信号会在一个平均值附近抖动,如果不加以处理将对激光陀螺的抖动效率产生影响。通过设置环路滤波器的相关参数,可以滤除输入信号中的噪声,这使得PLL模块所跟踪到的机抖反馈信号是不包含噪声的。
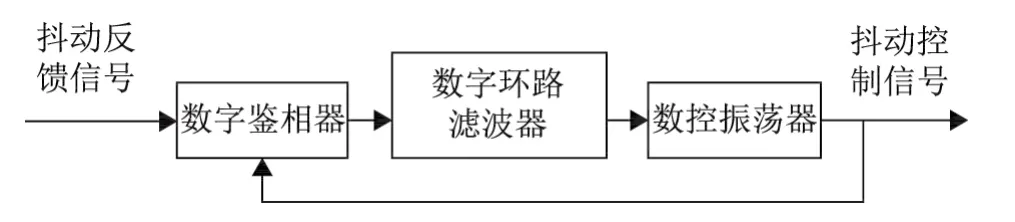
图2 锁相环模块原理图Fig.2 Diagram of phase-locked loop
2 闭环控制的实现方法
闭环控制的首要任务就是建立起陀螺抖动控制信号频率和陀螺抖动反馈信号频率之间的关系,通过PLL引入的闭环反馈控制系统可以达到这种目的。鉴相器、环路滤波器对PLL的性能起决定性作用。
鉴相器用于鉴别输入信号与输出信号之间的误差,由于激光陀螺谐振频率随温度等外界因素的变化量级很小,所以鉴相器的精度要求很高。卫星接收机在跟踪解调所接收到的信号时所用的二象限反正切函数精度较高但计算复杂,只适合在卫星接收机中的DSP芯片上实现,而在FPGA中使用的鉴相器通常为异或门鉴相器和边沿控制鉴相器。我们使用异或门鉴相器比较输入信号Fin相位和输出信号Fout相位之间的相位差θe,所设计的适合在FPGA中实现的锁相环系统原理如图3所示,并输出误差信号Se作为后续数字环路滤波器中的K变模可逆计数器的计数方向信号。环路锁定时,θe=0,Se为一占空比为50%的方波信号。

图3 锁相环结构框图Fig.3 Architecture diagram of phase-locked loop
环路滤波器的性能也在很大程度上影响着锁相环的性能,若在可编程数字逻辑电路中采用传统的方法实现环路滤波器,则需要耗费很大的资源,且滤波的精度不够理想,所以我们设计了一种改进的环路滤波器,采用比例积分的控制方法代替了传统的环路滤波器。该种比例积分控制方法将鉴相器输出的误差信号乘以一特定的比例系数,用于进行比例控制,同时根据相位误差进行积分控制,最终通过加法电路求得振荡器控制参数,改进的环路滤波器的原理如图4所示。

图4 改进的环路滤波器结构原理图Fig.4 Diagram of improved loop filter
将环路滤波器更换为比例积分控制器后,有可能使该闭环控制系统不稳定,需要根据传递函数分析确认该系统的稳定性。由于该闭环控制系统中的压控振荡器具有显著的非线性特征,所以只能求得该系统的局部动态数学模型,可推导出该锁相系统的局部动态传递函数为(1)
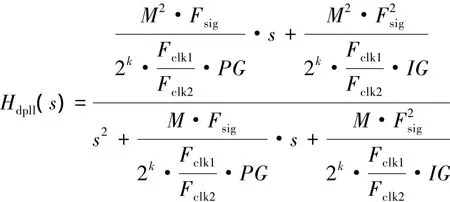
根据Hdpll(s)的传递函数可以看出,该系统为二阶系统,系统的自然频率为

系统的阻尼系数为

根据该系统的局部动态传递函数可知道其有两个负实点,所以该系统是局部稳定的,表明所采用的比例积分控制方法可以替代低通滤波器的滤波方法,使得振荡控制参数N局部收敛。同时由于积分环节的引入,即使锁相信号和被锁信号之间的频率突然相差很大,该锁相环仍能快速跟踪上被锁信号,理论上该系统不仅能紧密跟踪上被锁信号,相对于原环路滤波器的控制方法还具有快速响应的能力。
3 试验验证
首先通过仿真对NCO所输出的特定频率的正弦波进行了验证,从图5中可以看出,采用查表法实现的NCO输出的正弦波相位较为平滑,通过观察其频域特性可以看出频域分析图中峰值较为单一,其他频率点处幅值远小于最大峰值,符合要求。
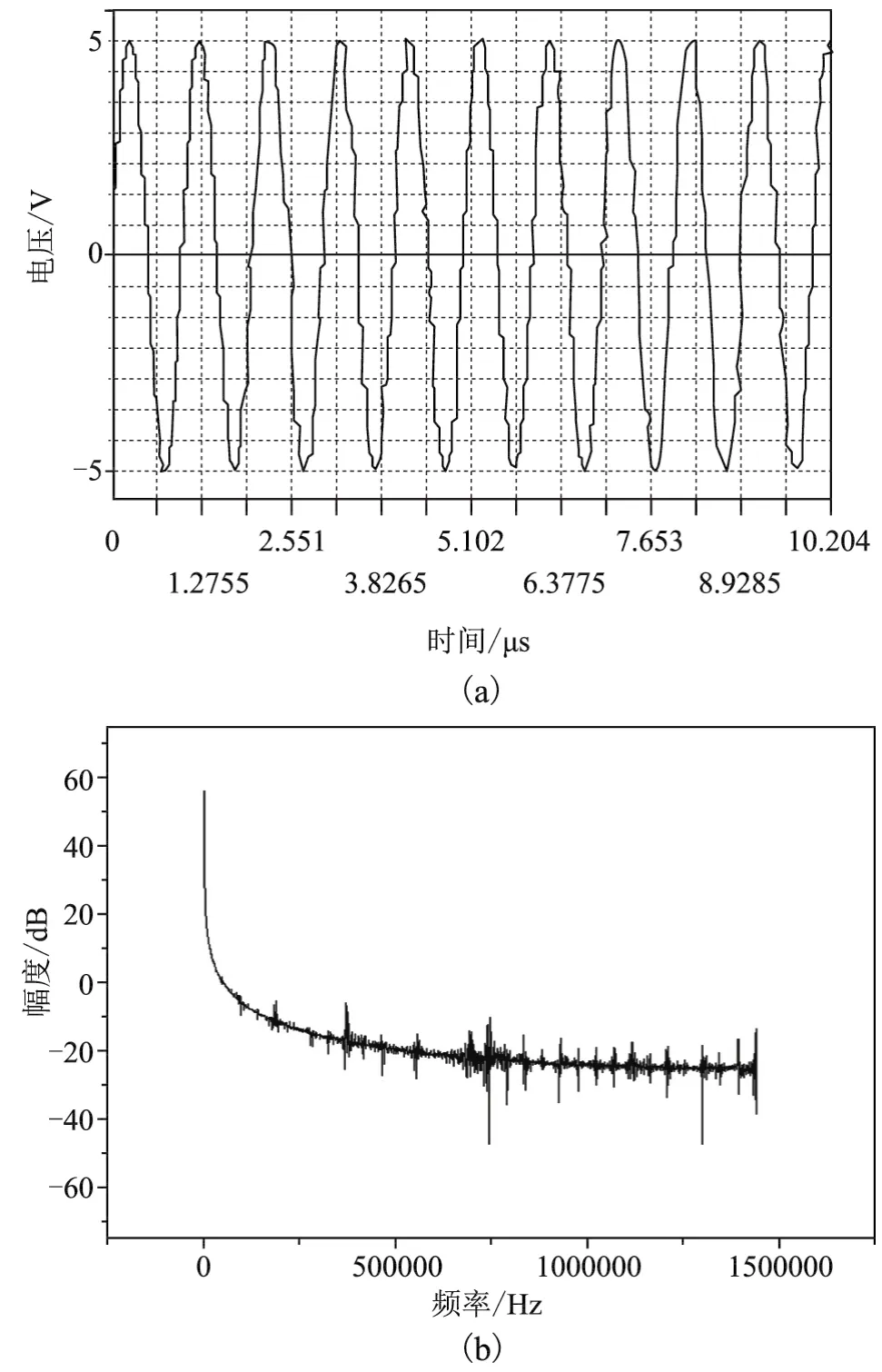
图5 正弦信号数字量Fig.5 Digital sine signal
在仿真过程中输入频率为300Hz的机抖反馈信号,机抖驱动信号起始频率为270Hz,验证锁相环是否能跟踪上机抖反馈信号,对机抖驱动信号进行频谱分析,如图6(a)所示。对频谱分析图在300Hz附近进行局部放大如图6(b),可以看到所输出的机抖驱动信号频率短时间内从270Hz处逐渐增大到300Hz处,然后稳定在300Hz处。
在实际系统上进行验证,通过示波器观察机抖反馈信号和抖动驱动信号的相位和频率的关系,如图7所示,局部放大图如图8(a)、图8(b)所示,可以看到最终机抖反馈信号和驱动信号达到一致。表明本文所提出的方法可以应用于激光陀螺的闭环抖动控制中。
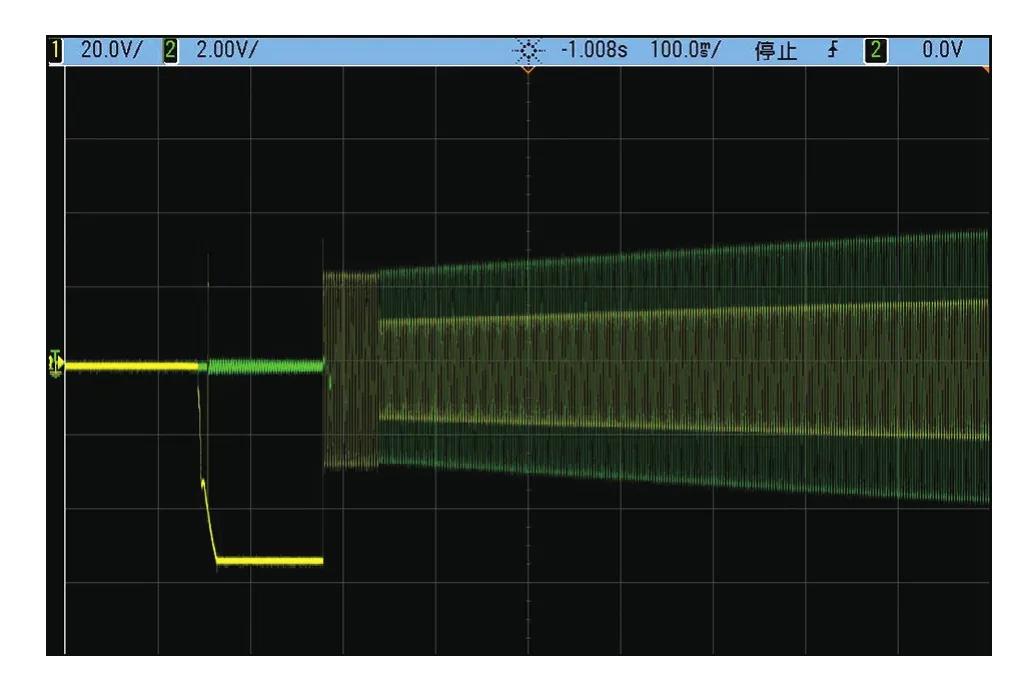
图7 驱动信号跟踪反馈信号Fig.7 Diagram of the driving signal tracking feedback signal
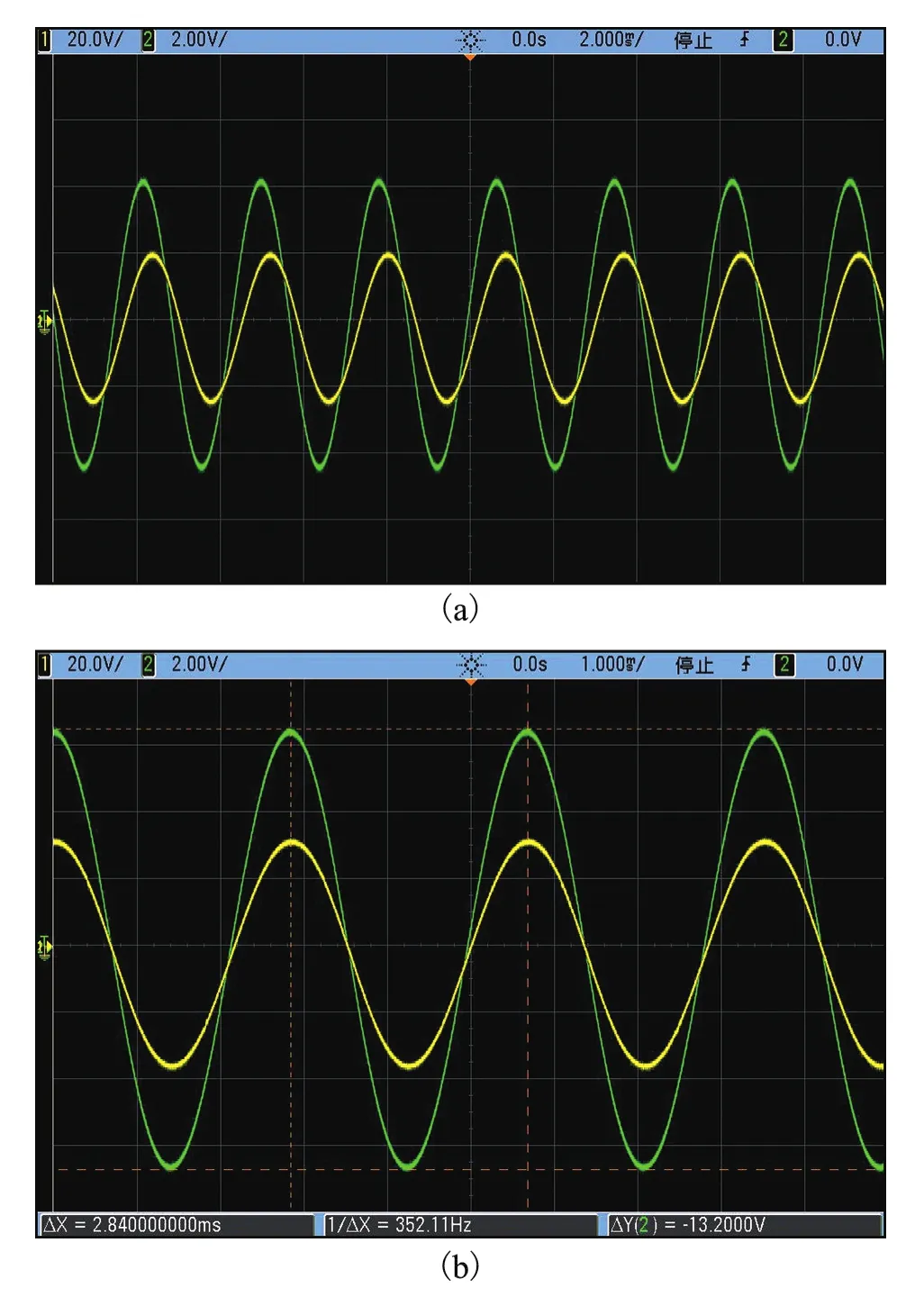
图8 机抖驱动信号与反馈信号局部放大图Fig.8 Detail view of the ditherd driving signal and the feedback signal
4 结论
通过数字仿真和实际试验可以得出结论,数字化的模拟抖动方案将不同领域的技术思想应用于激光陀螺的抖动控制中,有效地将模拟和数字电路技术结合,充分发挥了自身的优势,同时该种抖动闭环控制技术的实现为后续向激光陀螺抖动控制中加入各类噪声,为实现更高精度的激光陀螺提供了便利条件。
[1]杨培根.光电惯性技术[M].北京:兵器工业出版社,1999:52-54,80-85.
[2]陈士川.数控振荡器NCO的一种优化设计[J].通信对抗,2005,4:53-54.
[3]李海滨.基于FPGA的一种新型数字鉴频鉴相器的设计[J].微电机,2011,3:84-88.
[4]孙健.基于CORDIC算法的高速高精度NCO的FPGA设计[J].2007,36(4):68-72.
[5]许开銮.激光陀螺全数字抖动控制方法研究[J].2008,5:54-56,60.