基于复杂地形的无人机航摄系统1∶500 DLG生产
2015-07-04王芳洁段辉丽关翔宜昌市测绘大队湖北宜昌443000
王芳洁,段辉丽,关翔(宜昌市测绘大队,湖北宜昌 443000)
基于复杂地形的无人机航摄系统1∶500 DLG生产
王芳洁∗,段辉丽,关翔
(宜昌市测绘大队,湖北宜昌 443000)
摘 要:在山地地形中,用轻型固定翼无人机为航摄平台,采用POS数据与地面控制点相结合的方式进行空三加密并生产1∶500数字线划图,利用控制网精度以及DLG实测精度对测绘精度进行验证。实践证明了在复杂地形条件下利用无人机生产大比例尺地形图的可行性,并提出了控制精度的实用方法。
关键词:无人机;POS;大比例尺DLG;精度
1 引 言
轻型无人机航摄平台具有机动快速、使用成本低、操作简便等特点,能快速获取影像资料用于生产现势性强的4D产品,如今已经成为一种独具优势的航摄平台和测量手段。但由于无人机像幅小、姿态不稳定,其搭载的非量测型相机存在较大光学畸变,在地形起伏较大,在地形复杂的测区用无人机生产1∶500的大比例尺DLG还处于广泛研究验证阶段[1~3],对于航飞及影像质量、设备先进性、数据处理技术等多个环节都提出了特殊的要求。
本次生产实践是一次成功实践,在山地地形中,利用固定翼无人机搭载高精度POS设备,采用特殊的地面控制点布点方式,获得高精度的空三加密成果,再经过规范化DLG采集和外业调绘,最终完成约10 km2的1∶500 DLG生产,经过控制网精度以及实测精度检验,其理论精度与实际精度均满足1∶500山地地形图精度要求。
2 前期准备工作
2.1摄区概况
摄区为宜昌市秭归县郑家岭村,面积共约10 km2;该地区位于湖北西部西陵峡畔,平均海拔约为400 m,最低海拔约280 m,最高约520 m,居民区集中在海拔350 m~450 m之间,其地势起伏大、植被茂盛,是川鄂地区典型的山地地形。
2.2前期设计
(1)无人机飞行平台:采用弹射式固定翼无人机平台,机身尺寸为1080 mm×2000 mm×380 mm(机长、翼展和机高),最大起飞重量9 kg,任务荷载2 kg ~3 kg,普通环境中发动机功率为2 000 w,飞行高度可达5 000 m,巡航速度110 km/ h,抗风6级,续航时间3 h~4 h。其飞行控系统由自驾仪、GPS定位装置、姿态陀螺、无线电操控系统等组成,导航精度米级。
(2)相机参数:无人机搭载的相机类型为Nikon D600,像素大小为5.972 μm,CCD大小为35.926 mm× 23.982 mm。为保证准确度,相机畸变校正必须在专门的检校场中进行,并且要在航摄前重新检校以获得最新的数据,检校参数如表1,其坐标原点在影像中心。

相机检校参数 表1
(3)无人机飞行参数:根据1∶500地形图生产的精度要求,获取影像的地面分辨率需优于10 cm,将飞行航高设置为300 m。由于摄区内高差跨度较大,按照大飞机航空摄影测量外业要求应进行航摄分区,但该区域按高程分区会造成多个狭长航带,不利于后期数据处理,并且考虑到房屋居民地集中在海拔400 m左右,位于航摄基准面附近,在不损失地物精度且顾忌地面分辨率的前提下未进行分区处理。结合实际地形数据设计飞行参数,如表2所示。

飞行参数表 表2
(4)航线设计:摄区呈狭长南北走向,飞行方向沿摄区走向南北飞行,如图1所示。
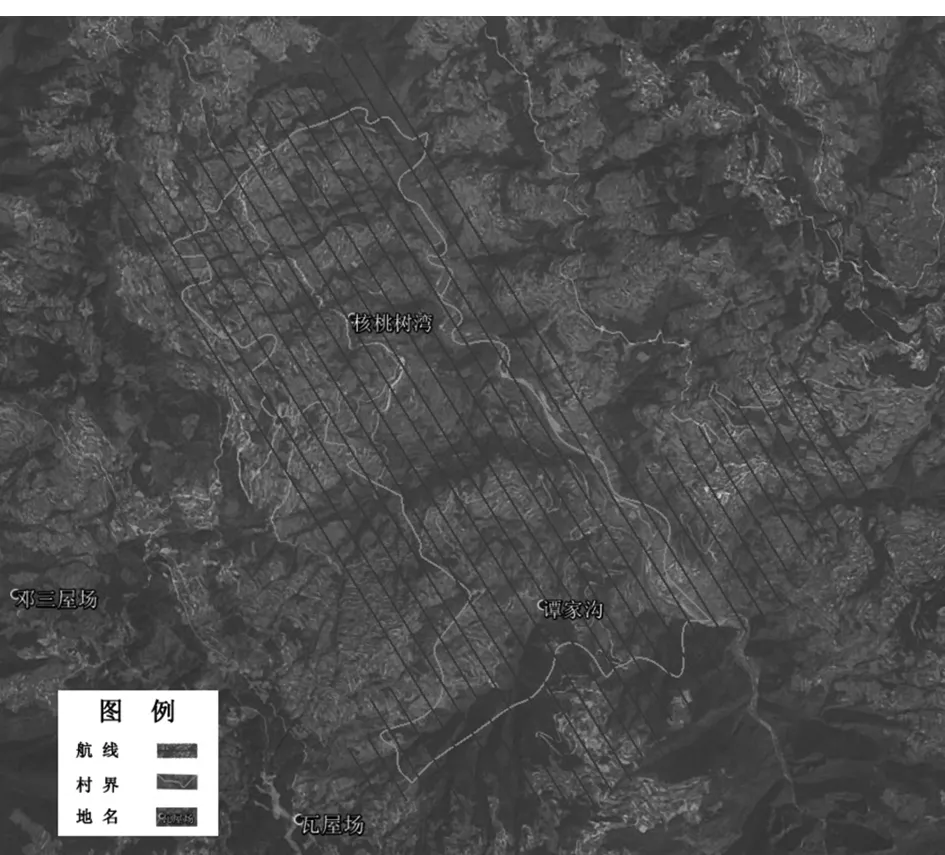
图1 航线结合图
2.3影像获取与质量保证
(1)倾斜角与旋偏角控制:无人机稳定性较差,为防止气流造成的旋偏角俯仰角较大,本次飞行将航向重叠度与旁向重叠度分别设置为80%与50%,确保不会出现漏洞。
(2)航线弯曲度:每条航线设有预备线,保证无人机以平稳的姿态进入航线。飞行过程中POS导航系统实时显示航迹偏差,飞控系统依据偏差值实时调整航线,漂移过大的航线及时补飞。
(3)航高保持:航摄过程中无人机通过GPS实时测定高程,自动按照基准值保持航高,保证航高变化不超过±10 m。
(4)影像质量控制:根据航空摄影国家标准,本次飞行选择的摄影时间为14:00~16:20,且天气晴朗少云,能见度大于6 km,云覆盖率小于10%,风速小于5 m/ s,并保持气象条件在航摄期间基本一致。
(5)飞前相机检查:起飞前要对相机做常规检查,设置快门速度、ISO等参数,光学镜头表面清洁,以获取影像清晰、色彩饱满的航空像片。
(6)航片质量检查:航摄结束后,使用航片检查软件检查影像是重叠度以及云雾、烟遮挡等。保证影像清晰,无漏飞情况,每张像片上无云影及烟雾,影像色调一致、色彩分明。
3 空三加密及精度验证
3.1空中三角测量
采用专业的Pixelgrid空三加密模块及PATB程序,采用严密的光束法平差方式对测区进行空三加密,恢复影像的外方位元素。
(1)影像畸变纠正与内定向
利用前期对相机检校获得的检校参数对原始影像进行畸变纠正。校正后设置参数、建立金字塔影像工程,进行影像自动内定向及大气折光和地球曲率改正(内定向限差为0.01 mm)。
(2)相对定向
设置参数,以POS数据为初始值,全自动匹配特征点、匹配成功后自动转点(需要根据提示改正相对定向和模型连接错误),转点成功后设置参数进行自由网平差。据平差计算结果和点位密集程度删除粗差点和误差大的点,首次删点限差可设置为3个~4个像素。
首次删点后进行第二次自由网平差,并将点位精度权重设大,然后查看点位分布情况和同名点残差,进行手动删除和调整,地物稀少和植被覆盖区由于匹配困难缺少同名点需要手动选取同名像点,保证每张影像在航带内有5个以上、航带间有3个以上均匀分布的同名点,每张影像中手动加点不需要很多,但要尽量精确并且合理分布。
继续进行平差计算,必要时仍需要手动调整,自由网平差和点位调整交互进行,不断调整精度权重,直到点位最大改变量收敛于0.005以内,除了极少数手动增加的同名点精度略低,其他同名像点残差在1个像素以内,并且有足够的精度高且分布均匀的同名像点,相对定向完成。需要注意的是由于在匹配困难区域手动增加的同名点比自动匹配的精度低,误差会超过一个像素,这些极少数手动增加的同名点是局部地区影像连接的关键,且不影响成果的整体精度,删点时必须保留。最终点位分布如图2(绿色为航带内相对定向点,红色为航带间连接点)。
图2 连接点分布情况
自由网构网精度与稳定性是后续绝对定向的保证,所以相对定向的质量控制至关重要。由于无人机拍摄姿态不如大飞机稳定、像幅小、高差对重叠度影像较大,相对定向环节更加困难,要求更高,人机交互的工作不可避免。
(3)野外控制点测量
无人机航测不能按照常规方法布设像控点,而是尽量采用平高网布网,这就对像控点的选取提出了更高的要求,必须选择影像6°重叠区域内位于平面上的特征点,比如水泥道场的角点,平屋顶的角点等,明显田块交汇处中心点等,考虑到1∶500地形图精度要求高,为保证绝对定向的精度,布点密度参照全野外布点,平均5条基线布设一个像控点。用宜昌CORS(测量误差在5 cm以内)采集特征点的三维坐标信息,在每个控制点附近采集一个备用控制点,并均匀的选择一些明显特征点采集坐标信息,作为后期检查点使用。
(4)绝对定向
进行控制点刺点,选择平差参数进行控制网平差计算,根据提示挑粗差、调整余差、检查刺点质量,必要时用备用控制点替换或进行实地控制点修补测。逐步增大控制点的权重,直到平差点位最大改变量收敛于0.005以内,并且控制点残差满足国标精度要求,绝对定向完成。
3.2空三成果精度验证
调整后最终参与控制完平差的控制点残差如表2所示,控制点分布如图3所示。

控制点残差报告 表2
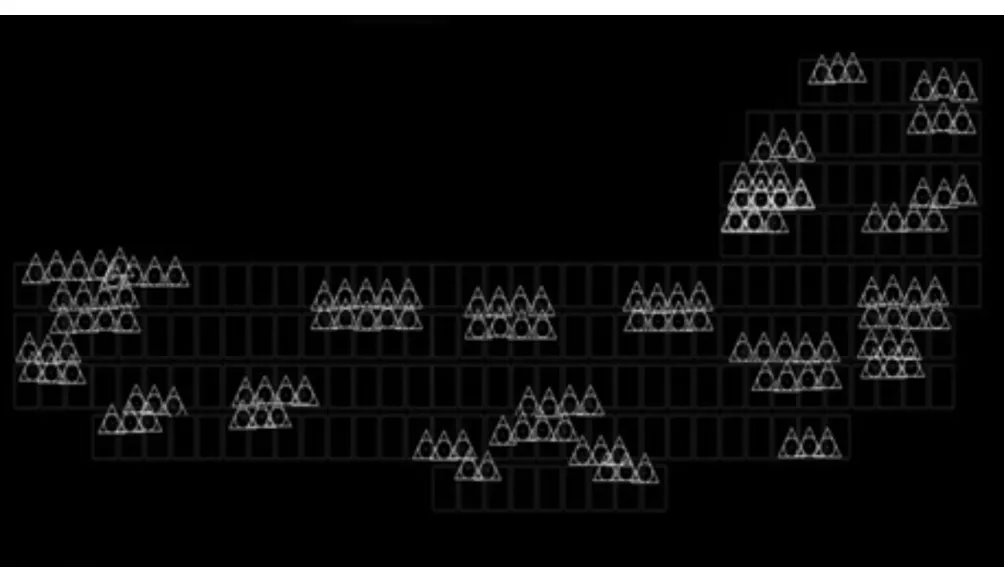
图3 控制点分布情况
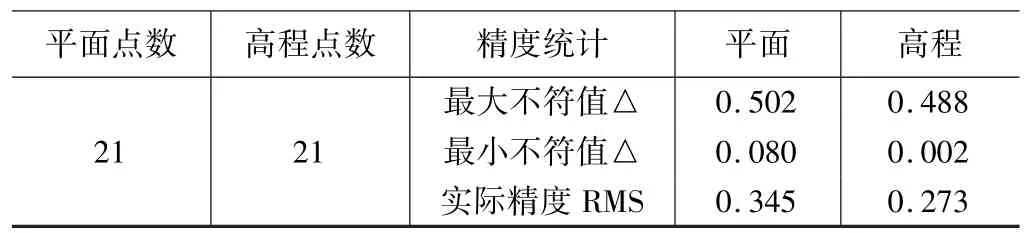
表2中R/ xy和R/ z分别表示控制点定位残差与高程残差,用公式计算出控制点中误差,其中n为量取的控制点总数(即基本定向点),据此得到精度值是衡量绝对定向精度的主要指标。同时,用计算检查点中误差,n为参与检查的总点数,△为检查点不符值计算出检查点中误差,是评定空三成果精度已经检验精度一致性的重要指标。计算结果如表3所示。
根据《航空数字摄影测量空中三角测量规范》中对成图比例尺1∶1 000的山地地形精度要求[4],基本定向点平面位置中误差0.2 m,高程中误差0.26 m,检查点平面位置中误差0.35 m,高程中误差0.4 m,满足国标要求。

基本定向点、检查点精度统计 表3
4 1∶100DLG采集调绘及精度验证
4.1数字线划图制作
(1)建立立体模型
在测图平台下导入空三角结果,建立立体模型,消除上下视差、构成正确的立体像对,进行核线重采样,使像对更加清晰。
(2)1∶1 000 DLG制作
利用MapMatrix专业立体采集模块配合EPS地理信息系统软件进行立体采集,实现采编一体的高效测图。立测作业要求、地物取舍、图示符号严格参照相关规范[5,6]。
(3)外业调绘
按照规范要求进行外业调绘[7],外业调绘对采集的数字线划图进行遮挡地物修测补测、房檐改正、属性数据采集等,同时根据野外调查对DLG进行核实检查。
(4)DLG编辑
根据外业调绘成果对DLG进行修改完善,修改完成后进行图幅接边等。完善后的DLG成果效果截图如图4所示。

图4 DLG成果图
4.2DLG质量检查
DLG成果是否满足1∶1 000地形图的标准要求,必须经过数据检查和精度验证。
(1)地图要素完整性、逻辑一致性、属性检查、表征质量和附件质量检查。
(2)位置精度验证
这项检查是对DLG实际精度的检验,是衡量此次成果是否合格的关键。在该测区中在DLG上均匀的选取了23个地物点进行实地坐标比对,残差值如表4所示。

DLG坐标较差统计表 表4
检查点不符值及精度统计表 表5
该测区实验的平差分析结果:
(1)依据地形图航空摄影测量内业规范[8],1∶500地形图山地平面中误差为图上0.8 mm,即实地0.4 m,高程限差参照规范中高程注记点中误差标准即0.5 m。参照表2可看出,实际精度可以达到国标要求。
(2)通过检验数据与国家标准的对比,说明在复杂地形中用无人机航摄的方式生产1∶500 DLG是可行的,从理论精度和实际精度两方面来看,精度满足要求且比较均匀,高程精度也得到很好的控制,可以看出成果质量是很可靠的。
(3)由于大比例尺地形图对精度要求很高,而影响DLG成果精度的因素有很多方面,必须在飞行的质量保证、空三加密,控制信息采集、立体测图等每个环节严格控制,才能得到理想的成图效果。
(4)在本文中POS数据只用于辅助影像匹配和控制网平差,由于人机的姿态不稳定,通过POS设备得到的外方位元素很难达到地面控制点的精度,所以如果定位成果用于大比例尺DLG生产,通过在地面布设高精度控制网的方式进行绝对定向仍然是目前最可靠的方法。
5 结 语
大比例尺线划图有精确的坐标和属性数据,便于空间分析、数据挖掘等,在当今社会经济发展中起着越来越重要的作用,但同时对于成图效率和现势性也提出了越来越高的要求,传统方式的全站仪野外测图方式必将逐步淘汰。无人机具有快速便捷、灵活机动、成本低等特殊优势,而室内立体采集直观快速,使测图周期大大缩短,一次性生产面积在几十平方千米以内的4D产品非常方便,这对于市级专业测绘单位具有更强的实用性。
经过学者不断研究和实践经验的积累,无人机航摄智能化程度将会越来越高,IMU/ DGPS系统精度的不断提高将实现无人机无地面控制测图[9,10],基于特征的影像匹配和绝对定向方法的研究[11]将进一步提高精度,利用无人机航测方式进行大比例尺地形图生产最终将成为一种成熟的技术。
参考文献
[1] 王志豪,刘萍.无人机航摄系统大比例尺测图试验分析[J].测绘通报,2011,911(7):18~20.
[2] 薛永安,王晓丽,张明媚.无人机航摄系统快速测绘矿区大比例尺地形图[J].测绘地理信息,2013,38(2):46~48.
[3] 罗先权,罗甫.无人机航摄系统在大比例尺成图中的应用[J].地理空间信息,2013,11(3):23~25.
[4] GB/ T 23236-2009.数字航空摄影测量空中三角测量规范[S].
[5] GB/ T 20257.1-2007.国家基本比例尺地形图图式第一部分:1∶500、1∶1000、1∶2000地形图图示[S].
[6] GB/ T 3007.1-2011.数字航空摄影测量测图规范第一部分1∶500、1∶1000、1∶2000数字高程模型、数字正射影像图、数字线划图[S].
[7] GB/ T7931-2008.1∶500、1∶1000、1∶2000地形图航空摄影测量外业规范[S].
[8] GB/ T 7930-2008.1∶500、1∶1000、1∶2000地形图航空摄影测量内业规范[S].
[9] 李学友.IMU/ DGPS辅助航空摄影测量综述[J].测绘科学,2005,(5):110~113.
[10] 胡庆武,殷万玲,史蕾等.无地面控制高精度POS大比例尺测图精度验证[J].测绘通报,2013,911(7):23~26.
[11] 张祖勋,张宏伟,张剑清.基于直线特征的遥感影像自动绝对定向[J].中国图象图形学报,2005,2,10(2):213 ~217.
The Production of 1∶500 DLG Using the UAV Aerial System Based on Complex Terrain
Wang Fangjie,Duan Huili,Guan Xiang
(Yichang City,Surveying and Mapping Detachment,Yichang 443000,China)
Abstract:In mountainous terrain,with the light fixed-wing UAV aerial platform,use a combination of POS data and ground control points to complete aerial triangulation and the production of 1∶500 DLG,and text verify of the surveying precision used control network precision and the actual measurement precision of DLG.Practice has proved the feasibility of producing large scale topographic map using the UAV aerial system in conditions of complex terrain,and put forward practical method of control accuracy.
Key words:UAV;POS;large-scale DLG;precision
文章编号:1672-8262(2015)05-86-05中图分类号:P237
文献标识码:B
收稿日期:∗2015—04—28
作者简介:王芳洁(1986—),女,工程师,硕士,主要从事无人机航空摄影及4D产品生产、三维数字城市等基础城市测量技术工作。
