微波传感技术在智能马桶上的应用
2015-07-03骆忠锋
骆忠锋
(厦门优胜卫厨科技有限公司,厦门 361000)
微波传感技术在智能马桶上的应用
骆忠锋
(厦门优胜卫厨科技有限公司,厦门 361000)
介绍了一种应用于智能马桶,可以穿透陶瓷和塑料来检测人体运动的微波传感技术。该技术利用多普勒原理实现对人体运动的检测。当微波传感器检测到人体移动后,会输出多普勒信号,该信号经过滤波、放大后送给PIC单片机进行处理。实际应用证明,该设计具有很好的检测效果。
微波传感器;多普勒;智能马桶;人体感应;MCU;陷波器
引 言
智能马桶使用比较多的人体运动检测方式是PSD(Position Sensitive Device,位置敏感器件)和PIR(Passive infrared Detector,被动红外检测器)。PSD是主动式发射,可比较准确地检测出位置,但是容易受到周边环境和障碍物的影响而导致误检测;PIR通常通过检测人体辐射出来的红外线来识别人体,是一种运动传感器,但是也容易受到温度等周边环境的影响。同时,PSD和PIR检测方式均无法透过非透明的材质,通常需要另外开窗口以检测接收信号,这在一定程度上破坏了产品外观的完整性和协调性。与目前卫浴领域简洁时尚的风格相违背。
为了充分保证产品外观上的完整性及更好的检测效果,本文提出了一种利用多普勒原理实现的微波人体检测方法。
1 总体方案设计
本设计在硬件上主要包含微波传感器HB100、陷波器、数控增益可调放大器、整形电路和单片机PIC16F1824等部分,设计框图如图1所示。

图1 总体设计框图
系统工作过程如下:首先单片机PIC16F1824控制微波传感器HB100发射微波信号,并不断地检测接收反射波,并根据多普勒原理将发射波和反射波进行混频,然后输出一个具有中频特性的多普勒信号,该信号经过陷波器滤除系统中的一些干扰信号后,输入到数控增益可调放大器进行信号放大。数控增益可调放大器的输出分别接至单片机和整形电路,整形电路的输出接至单片机,单片机根据系统的外接灵敏度条件输出控制数控增益可调放大器的放大增益。信号在单片机控制器中经过波形采集处理单元、频率检测处理单元、幅值检测处理单元和信号处理单元进行处理,并根据多普勒信号的波形趋势,结合预先确定的幅值和频率条件来判断出人体的行为状况,并输出对应的控制信号。
本设计充分利用了多普勒波形的强度变化规律,采用了判断信号强度变化趋势,并且结合强度和频率的限制,达到良好、可靠的检测效果。
1.1 硬件设计
1.1.1 PIC16F1824单片机
PIC16F1824是美国微芯公司设计的一款低成本、高性能8位单片机,最高工作频率为32 MHz,具有4 KB的闪存程序存储器、256字节的数据存储器以及256字节的EEPROM数据存储器,可用于存储系统中的一些参数设置,如数控增益可调放大器的增益设置,系统的软件灵敏度设置(包括灵敏度模式、灵敏度值、灵敏度档位等)。该单片机还有丰富的外设资源,如内部振荡器、10位A/D转换器、增强型串口通信模块、比较器等,无需额外的外部资源,既增强了系统的紧凑性和可靠性,又节省了系统的设计成本。
本文主要应用10位A/D转换器对系统的多普勒信号进行采集,并输送给后端的处理单元进行分析处理。应用增强型串口通信模块与智能马桶的主控制系统进行通信,接收系统的相关灵敏度设置调整信息及发送人体感应检测信息给主控制系统。
1.1.2 微波传感器
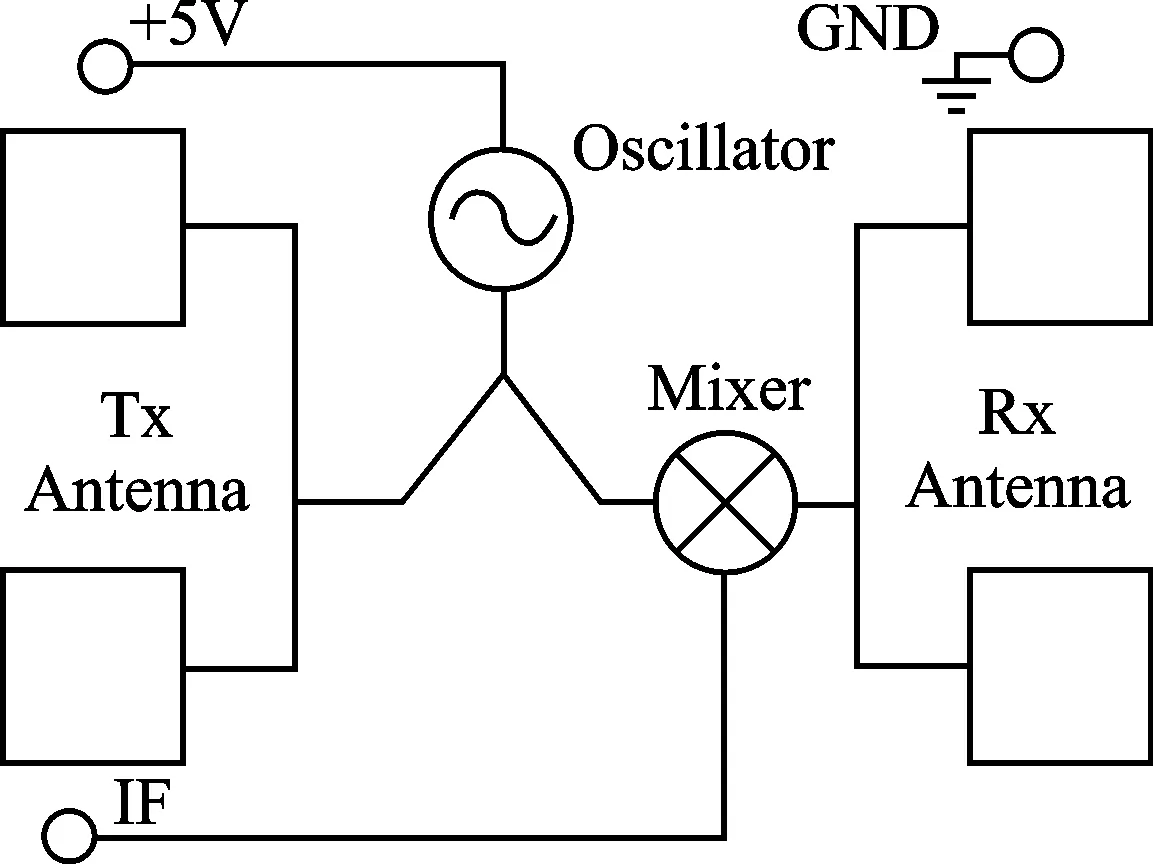
图2 微波移动传感器框图
HB100微波移动传感器是X波段移动传感多普勒模块,具有低功耗、高灵敏度、体积小等特点,是理想的低成本移动检测器。由介质振荡器(DRO)和一对微带天线(包括发送天线和接收天线)组成;用来向空间发射10.525 GHz的高频电磁波,接收该高频电磁波遇到障碍物后折回的反射波,并将接收波和发射波混频后,输出一个具有中频信号特征的多普勒信号。微波移动传感器框图如图2所示。
1.1.3 陷波器
智能马桶中需检测人体的靠近和离开,经过分析相关数据和试验数据,发现人体的运行频率集中在30~80 Hz,容易受到环境和电网中100 Hz或120 Hz的辐射干扰,造成误触发动作,因此设计中增加了陷波器实现滤除功能,如图3所示。
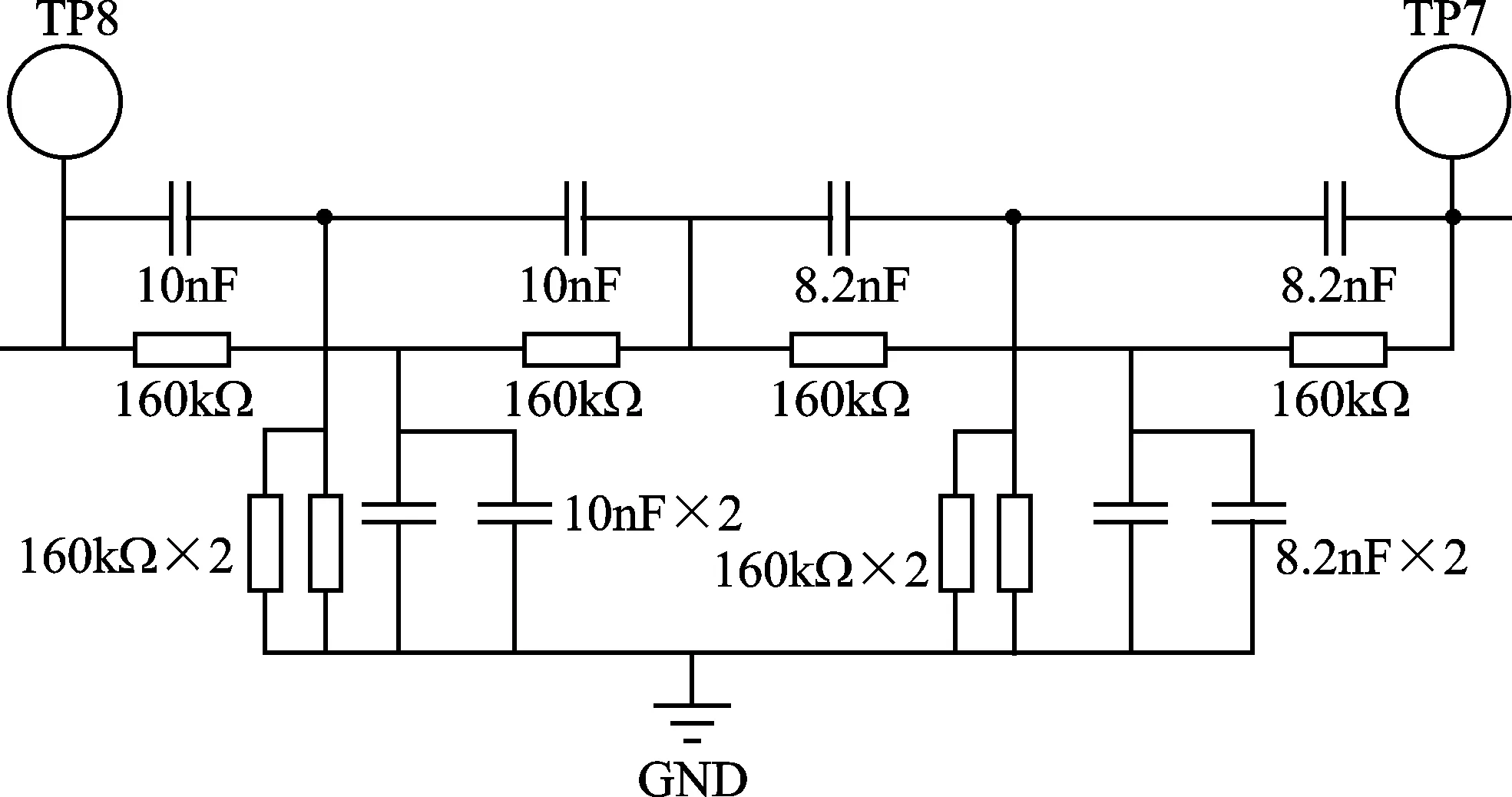
图3 陷波器
经过试验,该陷波器对各频率的衰减情况如图4所示。陷波器对100 Hz或120 Hz频率的衰减在70 dB(3 162倍)以上,而在80 Hz频率的衰减只有40 dB(100倍)。对于人体运动的频率50 Hz(对应运动速度0.7 m/s)的衰减更是直线下降,只有不到23 dB(14倍),可以忽略不计。因此该陷波器能有效地滤除干扰信号。

图4 信号衰减波形图
1.1.4 数控可调增益放大器
数控可调增益放大器用来对微弱的多普勒信号进行放大处理,是一个增益可调的低频放大器。当有物体在微波传感器覆盖的面积内移动时,微波传感器会输出多普勒信号,输出强度与发射能量的发射强度有关,一般情况下该信号很微弱,所以需要一个高增益的低频放大器来处理该信号,使其能被处理器所识别,数控增益可调放大器正是起到了这个作用。同时,该放大器可由控制器根据情况自动调节灵敏度。数控增益可调放大器包括固定增益放大器和可调增益放大器,放大电路如图5所示。
该数控可调增益放大器主要通过调整数字电位器MCP4011-50K的电阻值来实现64级的增益调整。MCP4011-50K是美国微芯公司推出的低成本易失性50 kΩ数字电位器,其具有64个抽头,且采用简单的递增/递减(U/D)串行接口控制滑动端的设置。但其为易失性数字电位器,断电后不保存滑动端设置值,因此该滑动端设置值由单片机PIC16F1824内部的EEPROM进行保存,并在上电初始化时恢复到MCP4011-50K芯片上。
1.1.5 整形电路
整形电路的作用是对变化缓慢或不规则的信号进行整形,同时可剔除输入信号中的干扰信号;单片机借此来衡量多普勒信号中的频率成分;该部分电路主要使用单片机内部的比较器来完成。原理框图如图6所示。
1.2 软件设计
本设计软件主要包含系统初始化模块、串口通信模块、灵敏度设置处理模块、波形采集处理模块、频率检测处理模块、幅值检测处理模块和信号处理分析模块等,具体
软件流程如图7所示。

图5 数控可调增益放大电路
2 人体运动检测原理
图6 比较器组成的整形电路
微波传感器不断地向空间发射高频电磁波。当人体在微波传感器覆盖的面积内移动时,微波传感器发出的高频电磁波遇到人体发生反射后折回,被微波传感器接收;微波传感器将接收波与发射波混频后输出一个中频信号,即多普勒信号。
该多普勒信号先经过陷波器滤除信号中的噪声,然后再进入数控增益可调放大器,信号被放大后被单片机识别;放大后的信号一路直接送入单片机,另一路经过整形电路后将不规则的信号整形后再送入单片机,借此来衡量多普勒信号的频率。
多普勒信号进入单片机后,由波形采集处理模块、频率检测处理模块和幅值检测处理模块进行相应的处理,得出幅值和频率,然后由信号处理单元利用电平变化趋势和幅值频率的限制来做最终判断。最后,单片机根据本次判定结果执行翻盖、冲刷等任务。

图7 系统软件流程
当目标物体静止时,多普勒信号的幅值和频率保持不变。当目标物体向多普勒微波传感器运动时,多普勒信号的幅值会呈现出上升趋势,频率也会呈现变大趋势;当目标物体远离多普勒微波传感器运动时,多普勒信号的幅值会呈现出下降趋势,频率也会呈现变小趋势;而多普勒信号的幅值与目标物体的具体位置有关,目标物体运动所产生的多普勒频率取决于目标物体与马桶之间的相对运动速度。
3 人体运动检测流程分析
以检测人体接近为例,假设单片机检测人体接近预设的参数为幅值V0,频率为[F0,F1],则预设的判定条件为:V>V0,F1>F>F0,幅值变化趋势上升。
人体朝着多普勒微波传感器的方向运动,多普勒微波传感器就会不断地输出多普勒信号,该信号是非常微弱的,而且掺杂了许多杂信。多普勒信号首先经过陷波器,初步滤除信号中的杂信,然后通过交流耦合的方法进入低频放大器将信号放大。交流耦合的方法可以去除掺杂在多普勒信号中的直流成分,使多普勒信号更纯净。接着被放大的多普勒信号进入了数控增益可调放大器,将信号放大到能被单片机所识别的程度。数控增益可调放大器的放大倍数由单片机根据工作模式确定。从数控增益可调放大器输出的多普勒信号(假设幅值为V,频率为F)则直接送入单片机进行处理。
人体不断的运动导致V和F也是不断变化的。通过软件算法,单片机识别,记录并存储V和F的变化,并不断地与预设的判定条件进行比对。当检测到V>V0、F1>F>F0,且幅值是一条上升趋势的曲线时,控制器就会认为是一次有效的接近检测,从而执行相应的输出。如果三个条件中的任何一个都不满足要求,则单片机会认为是无效的接近检测,不会执行相应的输出。
当人体从远处移动至多普勒微波传感器前方时,微波检测装置检测到的波形如图8所示。可以看出,整条曲线(电平)呈上升趋势,通过软件算法可以检测出该趋势;图中的V1限制用来指定目标物体出现的有效位置;波形尾部曲线有下降趋势是因为目标物体已到达位置并停止移动。检测到人体正在接近马桶后,马桶可立刻执行自动翻盖等任务。
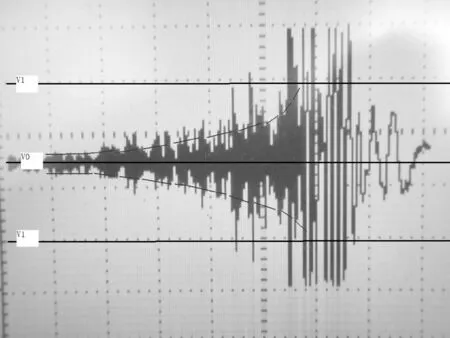
图8 人体靠近时波形
当人体从多普勒微波传感器前方移动至远处时,微波检测装置检测到的波形如图9所示。可以看出,整条曲线(电平)呈下降趋势,通过软件算法可以检测出该趋势;图中的V2限制用来指定目标物体离开的有效位置。检测到人体已远离马桶后,马桶可执行自动冲刷、自动关盖等任务。

图9 人体远离时波形
当人体从多普勒微波传感器侧面移动至传感器前面时,微波检测装置检测到的波形如图10所示。可以看出,整条曲线(电平)与图8的曲线是十分相似的,也是呈上升趋势。
单片机采样输入多普勒信号,并从中检测出幅值和频率;同时,对输入的多普勒信号进行信号处理,提取出幅值变化的趋势,即上升趋势和下降趋势。单片机根据检测到的这些信息,结合预设的判定条件最终判决是否为有效的检测,并执行相应的输出。

图10 人体侧面靠近时波形
判定的条件有3个:幅值、频率和幅值变化趋势。这3个条件单片机中都做有预设值,控制器将这3个条件和预设值进行比较,如果满足则视为一次成功有效检测。比如,假设检测目标物体接近的时候,要求幅值为V0、频率为[F0,F1]、幅值变化为上升趋势,单片机检测到的结果是V,频率为F。如果V>V0并且F1>F>F0,同时幅值变化趋势是上升的,那么就会视为一次有效的检测;如果这3个条件中的任一个都不能满足,则视为无效检测。
结 语

[1] ST Electronics (Satcom&Sensor Systems) Pte Ltd. AgilSense HB100 Datasheet.Rev1.02,2012.
[2] Microchip.PIC16F1824 Datasheet, 2014.
[3] Microchip.MCP4011Datasheet, 2006.
[4] Microchip.MCP6L04 Datasheet, 2009.
[5] 魏威,陈爱萍.浅析多普勒原理[J].文理导航,2013(8).
[6] 童诗白,华成英.模拟电子技术基础[M]. 4版.北京:高等教育出版社,2005.
[7] 多普勒原理[EB/OL].[2014-08].http://baike.baidu.com/view/4146252.htm?fr=aladdin.
[8] 运算放大器[EB/OL].[2014-08].http://baike.baidu.com/view/389763.htm?fr=aladdin.
骆忠锋,主要研究智能卫浴控制系统及关键模块的设计与应用。
Application of Microwave Sensing Technology in Smart Toilet
Luo Zhongfeng
(Xiamen Axent Corporation Limited, Xiamen 361000,China)
The paper introduces a microwave sensing technology which is using to detect the human motion through the ceramic and plastic part applying in smart toilet.This technology is realized by the doppler's principle. The microwave sensor outputs a doppler's signal when detected a human motion, and then the signal is sent to the PIC MCU after notch filter and amplifier. This technology now has been used in the mass product, and achieves a good effect on human motion detecting.
microwave sensor; doppler; smart toilet; human detector; MCU; notch filter
TP274.5
A
迪娜
2014-08-01)