基于GPRS及CAN总线的远程电机群控制
2015-07-03冀石磊夏继强陶震宇满庆丰
冀石磊,夏继强,陶震宇,满庆丰
(北京航空航天大学 机械工程及自动化学院,北京 100191)
基于GPRS及CAN总线的远程电机群控制
冀石磊,夏继强,陶震宇,满庆丰
(北京航空航天大学 机械工程及自动化学院,北京 100191)
针对现场分布式电机安装分散、群控难度大等运行特征,采用具有CAN总线的嵌入式设备对电机状态进行查询和控制,利用GPRS远程控制灵活的特点,设计出了一套电机群远程实时信息采集以及控制的网络系统。该系统对远程控制研究具有一定的参考价值。
CAN;远程控制;电机群;GPRS;总线技术
引 言
电机在各个领域中的应用已经相当广泛,并且正向网络化、智能化的方向发展。在复杂控制系统中,往往需要多台电机同时进行工作,如油田电机、矿山平台、工业切割、电梯控制[1]、农业加工等。而电机往往安装分散且工作于复杂的工作环境中,因此,远程控制不但有利于提高工作效率,改善工作环境,而且还可以大大提高安全系数[2]。在许多调速过程中,由于过程的庞杂性(如电机数量众多、传动要求高、时序复杂、地域分布分散等)使得控制设备变得庞大,对由大量电机组成的电机群传动调速系统进行网络一体化管理及控制显得尤为重要[3]。
传统的电机控制一般采用控制器与电机驱动器一对一的控制模式,存在抗干扰能力差、可靠性低、控制线路复杂、可维护性差等缺点。近年来多电机群控技术和方法的研究多种多样,多电机群控系统改进侧重点[4]一般为优化控制方法[5]和基于现场总线或远程网络控制等。结合油田的生产实际,张咏军[6]设计出了一套抽油机电机群控系统,采用分布式结构,通过无线传输实现电机远程群控系统,用于检测、保护和控制电机,以提高电机系统的可靠性和工作效率。中国计量科学研究院在2006年针对电机群控系统提出了一种基于3层网络的控制方法[7],从上到下分别为信息层、控制层和设备层。应慧娟[8]等在此基础上研究了基于三层网络的制粉厂生产线电机群控系统,实现了设备网上多台电机的远程监控。
目前,多电机群控技术仍然存在许多的问题和不足,比如,通信的可靠性与准确性低、缺少电机工作环境参数的采集等。本文研究的基于GPRS及CAN总线的电机群控制系统,是将微控制器技术、CAN总线技术应用于电机群的通信控制中,同时结合GPRS远程收发设备和计算机技术构成远程电机群的控制系统,以此来实现现场和远程监控。CAN总线具有很高的安全性,当某个节点严重错误时,能够自动脱离总线[9],能够有效地提高通信的可靠性与准确性;GPRS收发设备可以使任意具备发送短信功能的手机和其他GPRS收发设备随时随地对电机群的运行状态进行监测和远程控制,具有很高的灵活性和便捷性,在保证了远程通信功能的同时提高了可靠性和稳定性。
1 总体方案设计
参照中国计量科学研究院提出的三层网络控制方法,本系统的信息层采用GPRS无线通信,控制层使用CAN总线通信,设备层使用RS485通信。考虑到可靠性以及可拓展性,本系统采用一点对多点的通信方式,以主控制节点作为主监控,定时巡检多个从控制节点,接收从控制节点发送的电机信息数据,并进行存储。通过这些数据信息,工作人员可以及时进行判断并作相应的处理,通过主控制节点发送控制命令给从控制节点,由从控制节点完成对电机的直接控制[6]。系统结构设置为分布式控制,即一个主控制节点,多个从控制节点。当任何一个从控制节点发生故障时,其他从控制节点不受影响,主控制节点与从控制节点之间进行实时的双向数据传输[10]。
该系统采用模块化设计,主要由三部分组成,分别为主控制部分(包含嵌入式触控PC和主节点)、电机部分(包含多个从节点)和远程GPRS终端(远程节点)。该系统总体效果示意如图1所示。

图1 总体示意图
2 主控制部分
主控制部分包含嵌入式触控PC和主节点两部分。嵌入式触控PC为工业现场的控制终端,用来实时显示和控制电机的运行状态。主节点作为嵌入式触控PC、从节点和远程GPRS终端的连接点,接收嵌入式触控PC和远程GPRS终端发来的电机状态查询、控制指令,下发至从节点,然后将从节点发来的电机状态信息返回至嵌入式触控PC和远程GPRS终端。
2.1 嵌入式触控PC
嵌入式触控PC型号为蓝海微芯LJD-eWin7000,这是一款基于WinCE操作系统下的控制平台,它拥有32位ARM920T高速处理器内核,主要用于系统平台上的人机界面。使用VS2005中C#语言作为开发工具,包含监控界面(是这个电机群控系统的控制终端),可以实时显示电机转速及温湿度、记录报警状态、设置电机转速以及报警参数。
2.2 主节点
主节点原理框图如图2所示。一个主节点可以连接多个从节点,可以对每个从节点所连接的电机进行参数设定、启停控制操作,与此同时可实现单台和多台电机的运行状态监测、数据保存、查询等功能,便于保存信息和自动化管理。主节点的通信模块通过RS232通信接口连接GPRS无线通信模块,以及嵌入式触控PC来实现信息传输。GPRS无线通信模块用来实现远程数据发送,接收其他GPRS模块或者具有短信发送功能手机等指令请求终端发送的查询、控制信息,GPRS无线通信模块将接收到的信息发送给主节点,主节点进行判断和解析并作相应回复,最终通过GPRS无线模块将数据信息返回至发送指令请求的设备终端。

图2 主节点原理框图
嵌入式触控PC作为操作员现场操作的人机交互界面,实时显示各个电机的运行状态,包括转速、转向、报警参数等信息。交互界面上包含参数设置以及控制按钮,可以方便操作人员现场对电机状态监测的同时有效地进行启停与转速控制。
2.2.1 主节点硬件设计
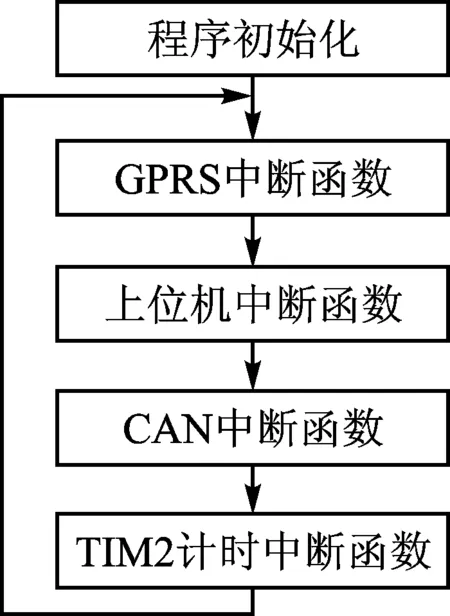
图3 主节点程序流程图
主节点电路的核心部件为STM32F103VET微控制器,便于数字化、智能化、网络化等现场总线连接监控,其抗干扰能力强、精度高、工作性能稳定可靠。在原有的电机控制环节中增加STM32微控制器,同时增加了对外通信的CAN总线接口,用来实现数据的稳定传送,上传电机运行状态信息的同时接收嵌入式触控PC的控制命令。CAN总线控制器采用CTM8251T,这是一款带隔离的通用CAN收发器芯片,CANG引脚为隔离电源输出地。因此电路中不再需要光耦、DC/DC隔离器等隔离器件。
2.2.2 主节点软件设计
主节点通过3个对外接口来接收从节点上传的电机信息和嵌入式触控PC发出的控制信息,同时向嵌入式触控PC发送状态信息和从控制器发送询问、控制等信息,图3为主节点程序流程图。
GPRS中断函数用来发送和接收GPRS远程命令及状态信息;上位机中断函数用来接收嵌入式触控PC发出的控制命令;CAN中断函数用来接收从板上传的电机状态信息以及控制命令后的响应;TIM2计时中断函数用来集中处理GPRS、嵌入式触控PC发出的命令,包括解析与下发对应的控制命令到目的从节点。
2.2.3 主节点应用层数据格式定义
通过对系统功能分析发现,系统通信需要传递的变量主要有从节点地址、电机状态、电机转速、温度值以及湿度值。依据功能可将数据类型分为询问指令、电机设置指令、系统参数设置指令、急停指令、应答信息以及报警信息。以嵌入式触控PC与主控制板之间RS232通信为例,其通信数据格式如表1所列,主要包括起始、结束、变量数值以及CRC校验。主节点与GPRS远程收发模块之间的RS232通信、GPRS远程收发模块之间的短信通信以及主节点与从节点之间的CAN总线通信,其数据类型与通信协议基本相同,在此不再赘述。
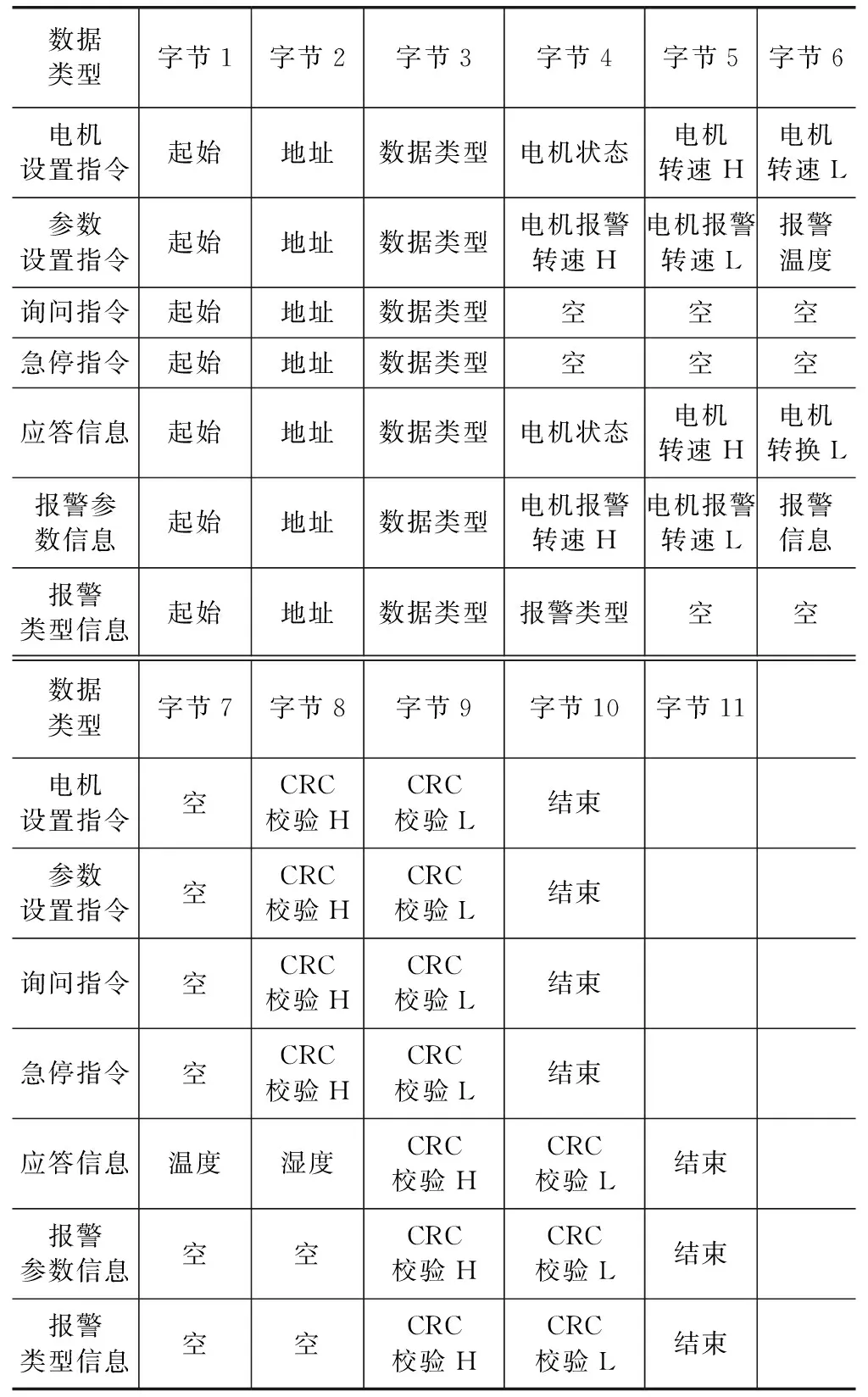
表1 数据格式定义
3 电机部分
电机部分包含多个从节点,接下来分别从硬件和软件两个方面来说明从节点的设计。
3.1 从节点硬件设计
与主节点类似,从节点的微控制器同样选用STM32F103VET6,从节点原理图如图4所示。温湿度传感器对工作现场进行温度和湿度情况进行信息采集,其串行数据通信接口直接连接微控制器的I/O引脚。从节点通过RS485总线定时向变频器发送电机状态询问指令,收到变频器回复后将电机的运行状态(转向和转速)存储至Flash芯片。如果收到CAN总线上来自主节点的询问请求,则返回电机状态信息。如果收到的是主节点发送的控制命令,则将设定的转速和转向下发至变频器,同时应答主节点的控制指令。

图4 从节点原理图
3.2 从节点软件设计
从节点通过与变频器的通信来实现对电机转速、转向的控制,通过CAN总线接收主板下发的控制命令并且返回状态信息(包括电机转向、转速、温度、湿度、报警状态),图5为从节点程序流程图。

图5 从节点程序流程图
4 系统调试
通过对两个三相异步电机Y80L-2测试发现,本方案能够通过现场嵌入式触控PC终端的软件界面、连接GPRS通信模块的上位机和任意能够发送短信的手机这3种途径来实现对多电机信息(包括电机转向、转速、现场温度、湿度)的采集,以及电机转向、转速、报警温度、报警湿度的现场及远程的监测和控制。图6为嵌入式触控PC控制终端显示界面,图7为远程GPRS设备终端上位机界面。
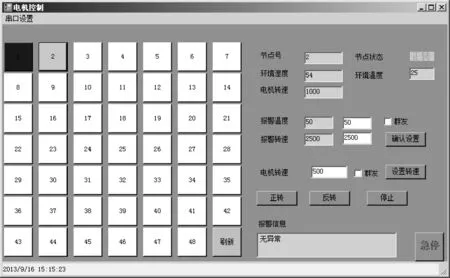
图6 嵌入式触控PC终端显示界面
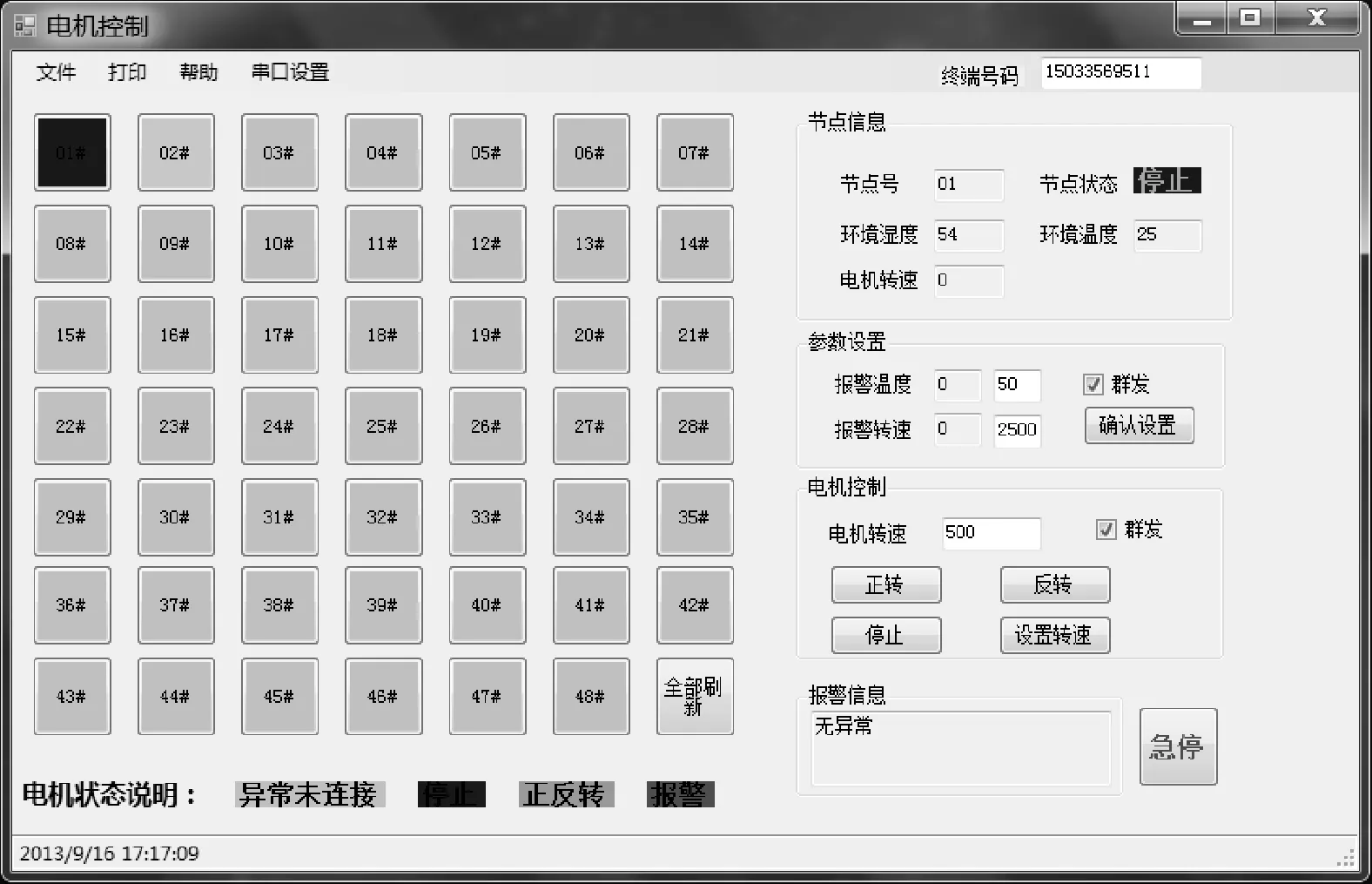
图7 远程GPRS设备终端上位机界面
结 语
本文基于GPRS及CAN总线技术设计的远程电机群控制系统,结合实际生产情况采用分布式结构和无线数据传输,实现了低成本、高效率的控制系统。无论是在电机工作的工业现场,还是工作人员的办公室或者是任何其他地方,工作人员都可以实时获得电机运行状态的参数并且
对其进行控制。这极大地提高了操作的便捷性、降低了控制的复杂性。

[1] Brand M,Nikovski D.Optimalparkingin group elevator control[C]//IEEE International Conference on Robotics and Automa-tion,2004.
[2] 李海凤.CAN 总线的电机组远程控制[J].辽宁工程技术大学学报:自然科学版,2013,32(8):1125-1126.
[3] 赵黎明,张冰.电机群网络管控一体化PLC-SCADA设计及应用[J].工业仪表与自动化装置,2012,3(22).
[4] 杨勇.多电机系统群控技术的发展[J].广东技术师范学院学报:自然科学版,2011,2(17).
[5] DonJyh-Fu,Jeng IknoKim,JunzoWatada. Bio-soft computing with fixed-length DNA to a group control optimizationproblem[J].Soft Compute,2008(12).
[6] 张咏军.油田远程智能电机群控系统的研究[D].西安:西安理工大学,2007.
[7] 甘永梅,李庆丰,刘晓娟,等.现场总线技术及其应用[M].北京:机械工业出版社,2004.
[8] 应慧娟.基于三层网络的电机群控系统[J].电气自动化,2006,28(6):23.
[9] 夏继强,邢春香,满庆丰,等.基于CAN 总线的阀门远程控制系统[J].自动化仪表,2004,25(7):59-60.
[10] 贺安超,刘卫国,马珊.基于CAN总线的多电机嵌入式监控系统设计[J].计算机测量与控制,2011,19(7).
冀石磊(硕士研究生),研究方向为机电一体化。
Remote Motor Group Control Based on GPRS and CAN Bus
Ji Shilei, Xia Jiqiang, Tao Zhenyu, Man Qingfeng
(School of Mechanical Engineering&Automation,Beihang University,Beijing 100191,China)
According to the operation characteristics of the distributed motor such as they are difficult in group control system and installed dispersed,we design a network system using embedded device with CAN bus to query and control the state of motor group,which uses the flexible remote control feature of GPRS to complete remote real-time information collection and control of the motors. This system has a certain reference value for the research on the remote control.
CAN;remote control;motor group;GPRS;bus technology
TP216
A
迪娜
2014-08-26)
