桥式卸船机抓斗的定位和防摆控制
2015-07-02李东童志银
李东 童志银
摘 要:格式抓斗卸船机在散货码头中被广泛应用。不过在整体作业过程中,有诸多因素会引起抓斗摇摆,降低了作业效率和生产安全性。该文对桥式手机抓斗的定位和控制予以分析,通过双回路控制系统,对小车位置和负载摆各自予以控制,以便能够为工程实际工作选取合适的控制方法提供一些指导。
关键词:桥式卸船机 抓斗 定位 防摆控制
中图分类号:U653.928 文献标识码:A 文章编号:1672-3791(2015)02(a)-0085-01
桥式抓斗卸船机在散货码头业中得到广泛的应用。不过卸船机在作业期间,由于小车的速度转换、抓斗的负载升降和扰动等诸多因素,会造成抓斗出现摇摆现象。抓斗摇摆会很大程度地影响作业效率,加大整台机子的结构负荷,同时还会影响生产安全性。小车定位和抓斗摇摆控制是实现抓斗卸船机自动运行的主要技术。该文从小车定位和抓斗摇摆两个方进行分析,设计具有两个回路的控制系统,对两者进行控制。
1 卸船机系统简化数学模型
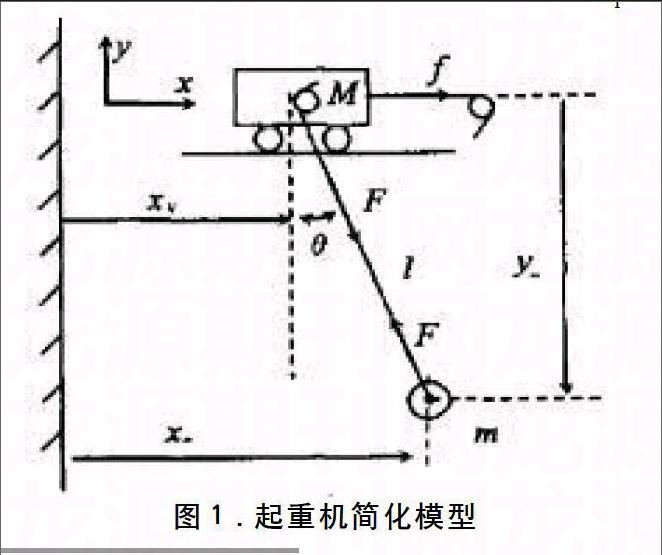
卸船机的简化模型如图1所示。
其中,M为小车质量;m为负载质量;θ为悬绳的摆角;l为悬绳的绳长;xM为小车的位移;xm为抓斗的水平方向位移;ym为抓斗的垂直方向位移;xd为抓斗与小车的相对位移;f为小车的牵引力;F为抓斗的牵引力。
假设:
a.小车和负载分别为质点;
b.与小车牵引的摩擦力不予以考虑;
c.悬绳的质量以及其引起的长度变化不予以考虑;
d.空气阻力不予以考虑;
e.小车和负载运动于x-y平面之上。
系统的控制是为了能够控制电机驱动小车带动负载安全的抵达目标位置,而且要求定位准确及负载无摆动,简单的说就是使xM,和在抵达至目标位置的时候降低为0。
2 控制系统的结构
采用桥式卸船机的线性二次型最优的控制方法,对控制系统的控制性能进行比较和验证。
2.1 线性二次型最优控制
如果把小车位移xM定义成对目标位置的相对位移,那么就给予控制作用u,依照线性二次型最优控制原理,能够得到状态方程的状态变量为0,实现小车准确抵达目标位置,并且抓斗无摆动。
3 结语
在抓斗卸船机作业的整个过程中,小车的速度转换、抓斗的负载升降和扰动等诸多因素都会引起抓斗摇摆。抓斗摇摆会很大程度的影响卸船机结构寿命和安全生产。该文对桥式手机抓斗的定位和控制予以分析,通过双回路控制系统,对小车位置和负载摆各自予以控制,并通过仿真实验证明了模糊控制方法和常规PID控制方法的可行性,不过仍然需要进一步进行实验研究。
参考文献
[1] 宋合川.桥式卸船机抓斗摇摆控制机理与仿真研究[D].上海:上海交通大学,2008.
[2] 朱也夫.抓斗卸船机抓斗轨迹优化及控制策略的研究[D].大连:大连海事大学,2010.
[3] 宋合川,姚振强,张雪萍.桥式卸船机抓斗摇摆数值仿真与控制分析[J].机械设计与研究,2008(2):93-96.
