一种基于复合模型的机动目标跟踪算法
2015-07-01杜立夫禹春梅
李 洋,杜立夫,禹春梅
(北京航天自动控制研究所,北京 100854)
机动目标跟踪技术是实现对飞行目标有效预警和打击重要基础,正所谓“看得准”才能“打得准”。机动目标跟踪技术主要是通过雷达、红外等探测手段测量出飞行目标的一些运动信息,如位置、视线角等,而后通过合适的滤波算法,根据测量信息对目标的速度、加速度等状态信息进行估计,从而为后续的作战决策提供信息。
机动目标跟踪技术主要包含2 个主要部分,即机动目标模型和滤波算法。常用的运动目标模型主要有匀速(CV)模型、匀加速(CA)模型、Singer 模型、“当前”统计模型等。其中Singer 模型和“当前”统计模型均属于时间相关模型,它们的区别在于前者采用了零均值加速度,而后者采用的是非零均值加速度[1]。非零均值加速度的采用使得模型更加贴近实际,从而在目标机动较大的情况下能够获得更好的跟踪效果,但在目标机动较小或匀速运动情况下,由于系统方差调整不当,该方法跟踪效果的优势并不明显。在Singer 模型中,由于加速度被认为是匀速运动中加入的零均值白噪声,因此可以直接应用Kalman 滤波算法,而我国学者周红仁[2]提出的“当前”统计模型中的加速度为非零均值时间相关的有色噪声,因此他又提出了一种自适应跟踪算法。后人又对该方法进行了改进,如胡洪涛等[3]采用模糊自适应算法对机动加速度方差自适应算法进行了改进,使得对目标加速度的估计精度得到提高; 戴瑞金等[4]又将神经网络算法应用进来,用来离线优化模糊系统参数等。
Kalman 滤波关键是建立合理的系统模型,如果建立的数学模型与真实模型一致,卡尔曼滤波可补偿掉所有规律性误差,并在统计意义上使得随机误差影响最小。然而仅采用单一目标机动运动模型的卡尔曼滤波算法在工程实践中将会产生局限性,因为所研究的飞行器运动规律比较复杂,目标的机动即加速度分解到空间坐标系三个轴中很难表现为同一种运动规律,所以用单一的运动模型难以准确描述飞行器的运动状态,导致卡尔曼滤波器对状态模型与观测模型的建立与实际机动目标的运动模型不能一致[5]。自适应卡尔曼滤波算法都不能对机动目标进行实时有效跟踪,最终使状态估计会出现较大偏差,甚至出现滤波发散,便失去跟踪意义。
本文针对一类飞行器(弹道导弹的再入,飞机俯冲侦查,飞机起飞与降落)表现的运动规律为纵向运动,而横侧向机动能力较小,分别利用“当前”模型的机动跟踪效果好与Singer 模型在目标机动不大情况下精度高的优势,提出一种基于“当前”模型与Singer 模型的复合空间目标机动模型,运用自适应卡尔曼滤波算法进行目标跟踪,实现对目标加速度的估计,可以更好地提高跟踪精度。
1 机动目标模型建立
1.1 目标量测与目标跟踪坐标转换
本文采用极坐标系下的量测模型和东北天直角坐标系下的状态模型进行目标跟踪算法的研究。以观测雷达为原点,建立东北天空间直角坐标系,则机动目标的极坐标系与东北天直角坐标系坐标转换关系如图1 所示。
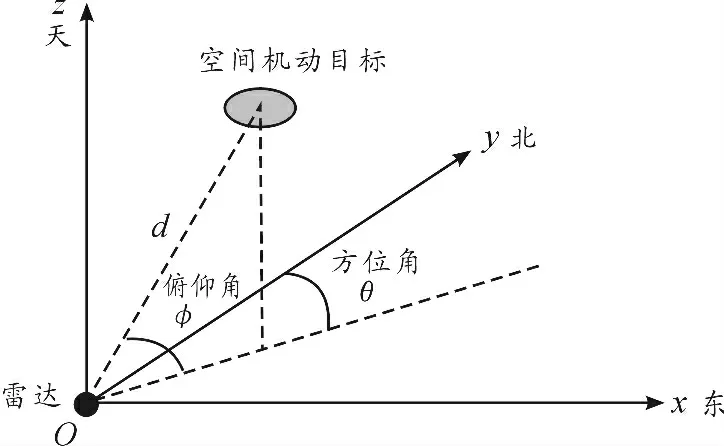
图1 机动目标极坐标系转换到东北天坐标系
1.2 “当前”统计模型
“当前”统计模型本质上是非零均值时间相关模型,均值是当前加速度的预测,机动加速度的“当前”概率密度用修正的瑞利分布来描述[2]
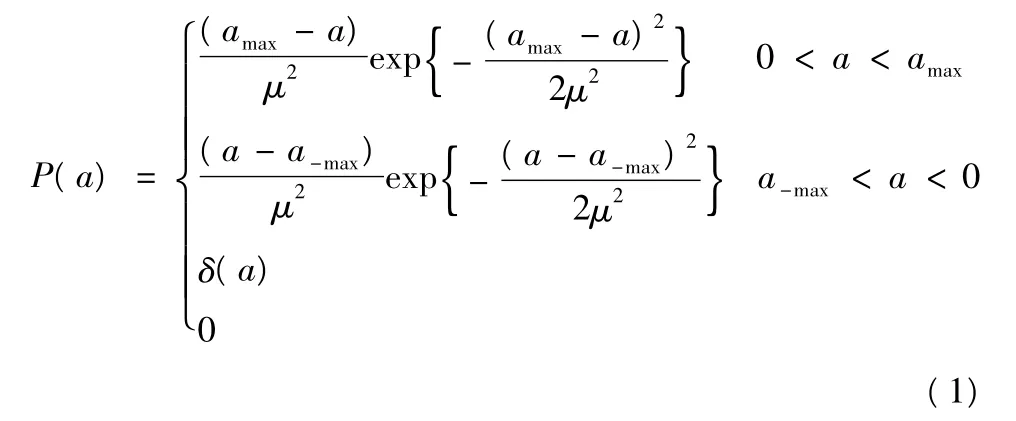
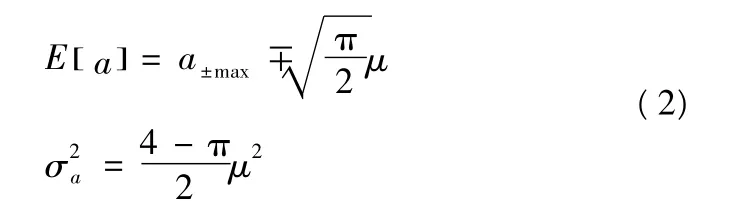
式(1)中amax>0,a-max<0 是假设已知目标加速度上限和下限,a 为目标的随机加速度,符合正态分布统计规律,μ >0 是常数。a 的均值和方差分别为
“当前”统计模型采用的是非零均值,并且与时间相关的模型

式(3)中:x(t)为机动目标的位置变量;a(t)为非零均值的有色加速度噪声量;为机动目标加速度均值;α 为机动目标的机动时间常数的倒数,即机动频率; ω(t)是零均值,方差是的白噪声为机动目标加速度方差值。
设a1(t)=a(t)+,可得
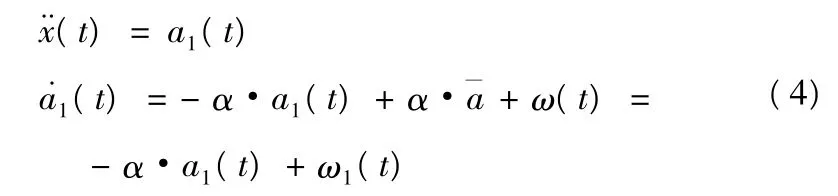
式(4)中:a1(t)为机动目标加速度状态变量;ω1(t)是均值为的白噪声;a1(t)的最优估计是过去观测Y(t)的条件均值


写成状态方程,即得到机动目标“当前”统计模型
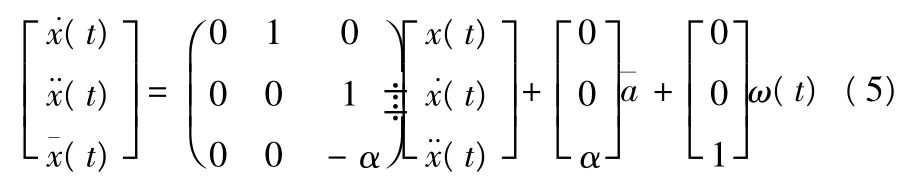
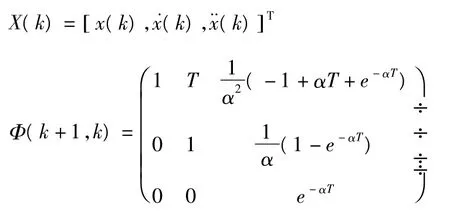
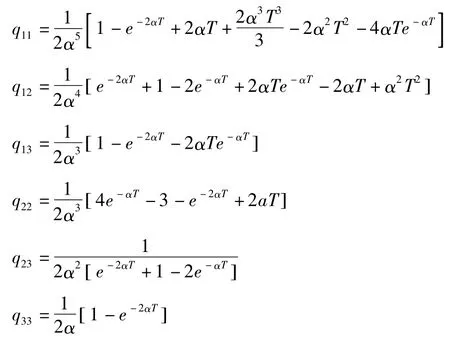
设采样周期为T,通过离散化方法,可以得到离散机动目标运动方程

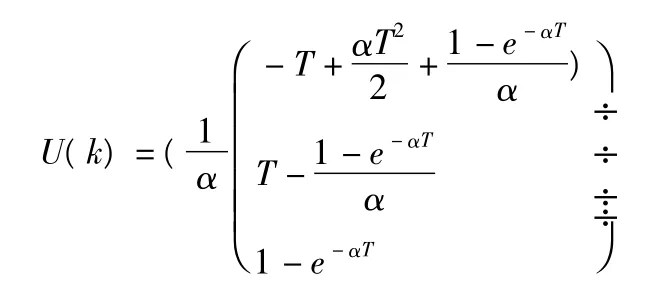
其中
W(k)是离散时间白噪声序列,并且
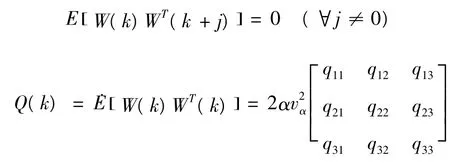
其中
卡尔曼滤波观测方程为

其中当仅有含噪声的目标位置数据可观测时,有
V(k)是零均值,方差为R(k)的高斯白噪声序列。
2 自适应卡尔曼滤波算法
根据机动目标的运动方程和观测方程,运用卡尔曼滤波方程可以估计目标的运动状态。标准卡尔曼滤波算法描述如下。
1)输入初值X1,P1;
3)状态预测协方差阵,
Pk|k-1=Φ(k,k-1)Pk-1|k-1ΦT(k,k-1);
6)状态估计协方差阵,Pk|k=[I-KkHk]Pk|k-1;
7)是否停止解算? 是,结束;否则,转回2);

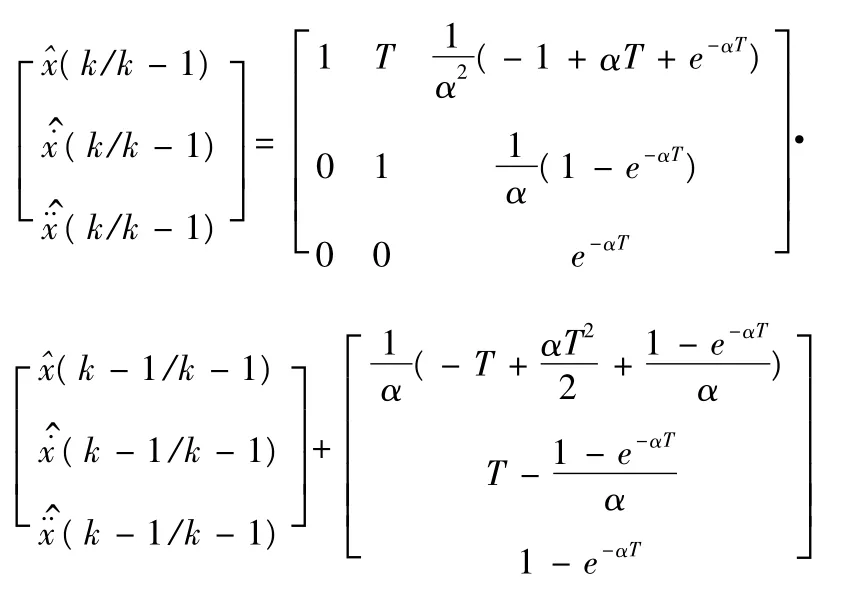
考虑以上方程,得到下式:
根据“当前”加速度均值,目标机动加速度方差自适应调整如下:
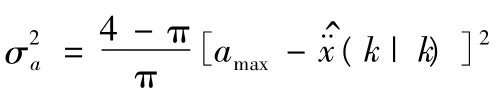
因为目标机动加速度方差影响卡尔曼滤波增益值,这样就使卡尔曼增益值随目标机动当前加速度自适应变化,至此基于当前加速度的自适应卡尔曼滤波算法推导完毕。
3 仿真实验
3.1 仿真数据处理与分析
为了验证算法的合理性与有效性,本文利用2014年全国研究生数学建模竞赛试题4 中一组给定的机动目标雷达测量位置数据,进行算法仿真分析。经过坐标系转换和处理数据,画出机动目标东、北、天向位置变化曲线如图2、图3、图4 所示。
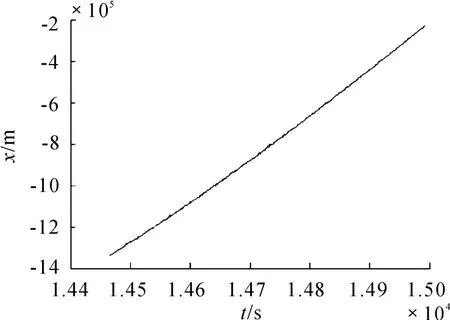
图2 雷达测量的东向位置
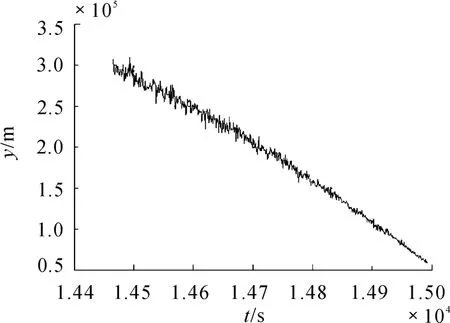
图3 雷达测量的北向位置

图4 雷达测量的天向位置
将机动目标3 个方向的运动曲线分别拟合为二阶多项式,得到如下结果
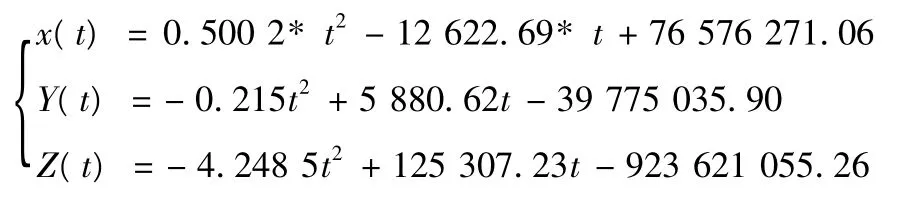
经初步离线计算可得加速度空间三个方向加速度大约为ax=1 m/s2,ay= -0.4 m/s2,az= -8.5 m/s2,负号表示加速度指向地面。此数据作为仿真验证的标准范围。
3.2 仿真分析
依据上述给定目标机动雷达测量数据进行仿真,以此检验跟踪性能。仿真条件设定,假定采样周期T =1 s,东北天三个方向独立观测。测距误差为零均值高斯白噪声序列,东向标准差为10 m,北向标准差为50 m,天向标准差为50 m。仿真结果与分析如下。
采用“当前”模型加自适应卡尔曼滤波进行滤波处理,得到的机动目标滤波如图5、图6、图7 所示。
由3.1 数据可以分析出东向北向加速度近似为零,天向是一个常值加速度,即对目标运动已知情况下,东向、北向目标机动模型采用Singer 模型加卡尔曼滤波算法,天向目标机动模型采用加速度“当前”模型加自适应卡尔曼滤波算法,滤波结果如图8、图9、图10 所示。
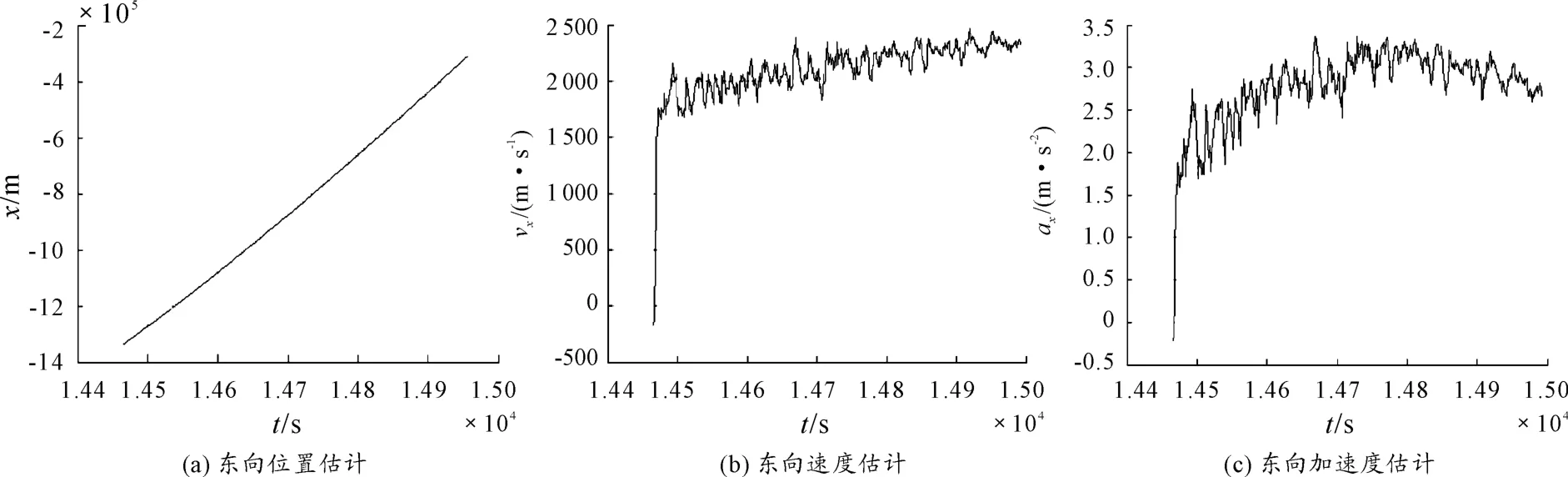
图5 “当前”模型跟踪目标东向运动信息
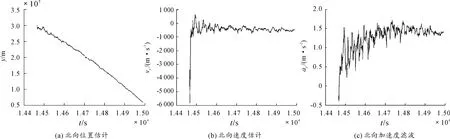
图6 “当前”模型跟踪目标北向运动信息
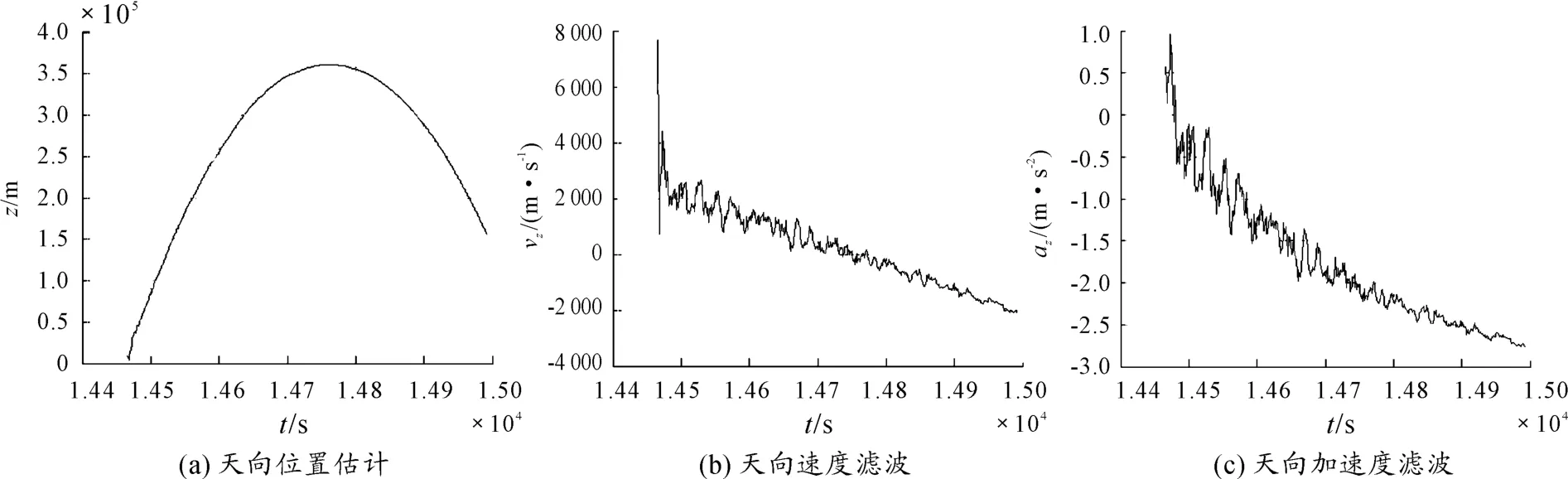
图7 “当前”模型跟踪目标天向运动信息
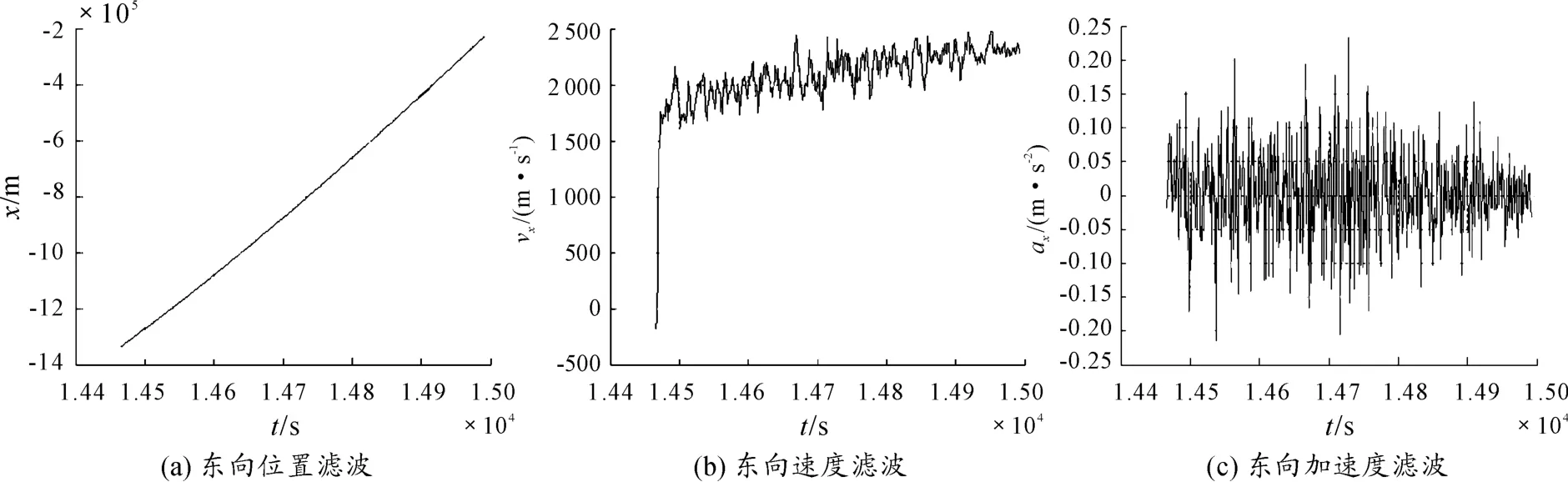
图8 “当前”模型+singer 模型跟踪目标东向运动信息
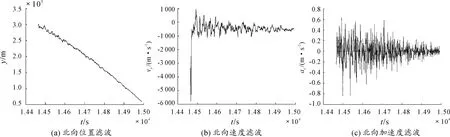
图9 “当前”模型+singer 模型跟踪目标北向运动信息
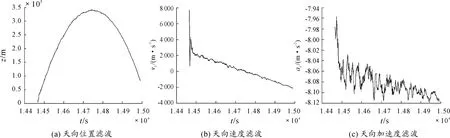
图10 “当前”模型+singer 模型跟踪目标天向运动信息
由仿真图的结果可以看出,分别两种模型对机动目标进行滤波估计,航迹估计都取得比较好的效果,速度估计的趋势大体相当。但是只采用“当前”模型的机动目标跟踪的加速度估计与此前数据分析的结果出现明显偏差,而采用对不同坐标方向建立复合模型对目标信息进行滤波并跟踪,不仅航迹滤波跟踪效果较好,而且加速度滤波估计值也更精确,也符合常理值,说明复合模型更具有实用性。
4 结束语
本文利用给定一组雷达数据进行仿真,分别采用“当前”模型与复合模型,运用自适应卡尔曼滤波进行空间机动目标跟踪,通过仿真数据分析可知,机动模型和滤波算法有机的结合才能得到更真实的信息,机动目标跟踪才更具有意义。许多飞行器在一定时间范围内只在纵向平面内或横向平面内进行机动,飞机的降落和起飞,国外的侦查飞机为了对特定目标的侦查也是纵向平面内的机动,目标的逃逸以及弹道导弹再入等都是符合这一运动学规律,所以建立对目标跟踪这种混合模型进行机动目标跟踪更具有实用价值。下一步工作中,将考虑机动目标辨识以及模型的切换问题,使跟踪算法进一步满足自适应性。
[1]杨艳成.基于交互式多模型的机动目标跟踪算法研究[M].哈尔滨工程大学,2011.
[2]周宏仁,敬忠良,王培德.机动目标跟踪[M].北京:国防工业出版社,1991.
[3]胡洪涛,敬忠良,田宏伟,等.基于“当前”统计模型的模糊自适应跟踪算法[J].系统仿真学报,2005,17(2):293-295.
[4]戴瑞金,吴敏,吴学军.基于神经网络的机动目标跟踪模糊Kalman 滤波算法[J].信息技术,2008(4):56-59.
[5]严浙平,黄宇峰.基于卡尔曼滤波的动目标预测[J].应用科技,2008,35(10):29-32.
[6]李伟彤,司锡才.一种基于JPDAF 的机动目标轨迹融合算法[J].弹箭与制导学报,2003,23(4):62-64.
[7]李辉,沈莹,张安.机动目标跟踪中一种新的自适应滤波算法[J].西北工业大学学报,2006,24(3):354-357.
[8]唐吉. 卡尔曼滤波算法在强机动目标跟踪中的应用[D].南京:东南大学,2008.
[9]王君,闻娟,吴妍岩.机动目标的跟踪滤波处理[J].四川兵工学报,2013(11):111-113.
[10]许文忠,张阳阳,王梓斌,等. 雷达目标跟踪模拟技术[J].四川兵工学报,2013(5):104-106.
