基于实测数据的3D 视景显示技术在水中兵器试验中的应用
2015-07-01吕海涛管启亮
吕海涛,管启亮,谭 鑫
(91439 部队,辽宁大连 116041)
随着科学技术的不断发展和军事需求的不断深化,单一的二维显示技术已经无法满足现代军事斗争的需要,尤其是在多维度的水中兵器试验中,更是需要在三维立体角度直观地显示目标在水下的运动情况和为位置关系。所以3D 视景显示技术应运而生并迅速应用于各项水中兵器的试验中。如何更好地显示试验中目标的运动轨迹和相对位置关系,将对试验的成功提供很大的帮助,因此3D 视景显示的应用已经成为目前试验、作战、演练中必不可少的一项手段。
1 系统设计
1.1 功能
1)态势设置及推演
在试验前为了更好地完成任务,需要对试验进行态势设置和推演,将事先录入的环境参数和目标参数进行解算,按照试验步骤进行预演,如果发现运动路径、方位等设置不合理,可以提前进行修改,避免了试验的失败。
2)3D 实时显示
3D 实时显示以试验实测数据为依托,通过相关的数据传输电缆和GPS(或北斗)定位系统将试验中的目标运动参数、位置参数等传输到显控主机中,通过数据解算,在显控界面中实时显示出来。在界面中,可以同时看到试验中目标的方位、俯仰、横滚、运动速度等参数,并可以关联目标与目标之间的实际位置关系,如直线距离、精度差、维度差、高度差等。
3)试验过程回放
当试验结束时,为了更好地了解试验中各个步骤的完成情况,可以对读取的数据进行回放,以便于总结试验中的优缺点,为之后的试验提供宝贵的经验。
1.2 组成
1.2.1 模型库
1)环境模型
在态势设置和推演中,需要设置环境参数,这些参数都是事先通过各种渠道进行采集、整理、拟合后,以数据模型的方式存储在环境模型库中,当需要调用的时候,可以直接对其进行调用。
2)目标模型
目标模型包括我方目标模型和敌方目标模型。主要包括:敌我双方的水面舰艇、水下潜艇、鱼雷、水雷发射平台、飞机、干扰器材((声诱饵、气幕弹、应答器、宽带噪声源等)。
我方目标模型可以对已知鱼雷、水雷、舰艇等目标进行建模,通过和实际数据指标的比对进行修正后得出更合理的数据模型。敌方资料通过互联网和其他渠道进行收集,对相关数据进行整理、拟合后建模,并存储到敌方目标数据库中。数据库可以随时将新收集到的数据进行录入,以便完善数据库中的资料。
1.2.2 实测数据库
实测数据库是在真正试验中测量得到的数据,将这些数据以固定的格式存入实测数据库中,因为这些数据都是真实的测量结果,所以需要和目标模型库中通过仿真计算的数据进行区分。试验结束后,可以经实测数据和模拟数据进行比对,以便于对试验模型进行修正,为之后的试验提供数据支持。
1.2.3 通信协议
通信协议用于制定信息在线路中的传输规则,包括信息格式、顺序控制、信息成帧与拆帧、差错控制等。这里采用一种常用的串行通信方式。它是标准的异步通信方式,通信格式为一串行帧,包括起始位、数据位(最低有效位在前)、停止位。这种工作方式下,TXD 用于发送数据,RXD 用于接收数据。当采用中断方式进行通信时,一帧数据的最后一位数据发送完,则发送中断标志TI 置位;同样,当一帧数据的最后一位数据接收完,则接收中断标志RI 置位。若串行口控制寄存器的奇偶校验允许位PEN =1,则发送时的数据由奇偶校验位所代替[1]。
1.2.4 外置接口实测数据的3D 可视化显示系统作为水声试验的一个重要节点,它通过局域网与程控计算机相连。通过网络接口实时接收来自仿真系统传送的鱼雷、目标和干扰器的位置、姿态等数据信息,驱动3D 模型在虚拟场景中的运动。
1.3 工作方式及流程
工作方式主要分为模拟方式和实测方式。模拟方式是指提前对试验目标的航迹进行规划,利用数据库中已有的数据模拟目标运行的轨迹,其主要用于试验模拟和推演。实测方式是指试验中,实时对目标的真实航迹进行录入,通过坐标转换,直观地在界面中显示目标的实际航迹和相对位置关系。主要在真实试验中应用。具体流程如图1 所示。
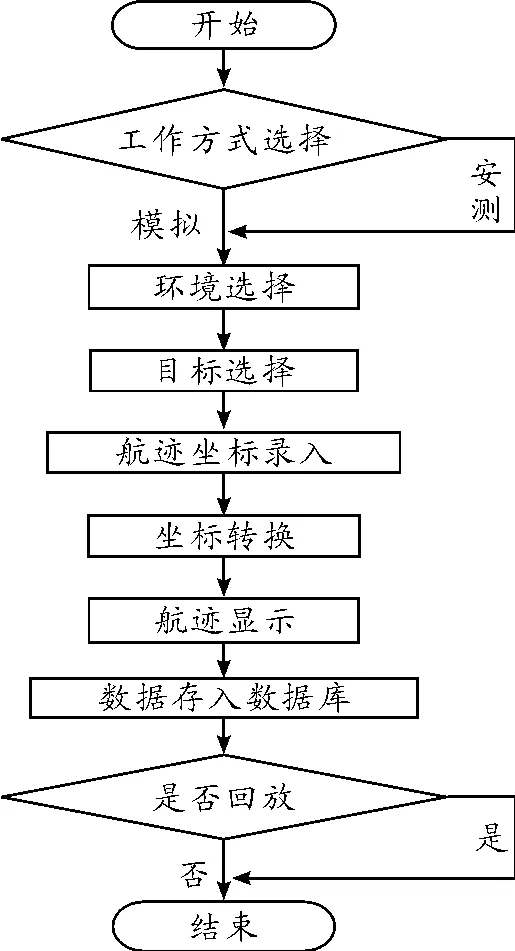
图1 工作方式流程
2 关键技术
2.1 3D 显示
1)3D 动态过程显示
在3D 显示中,最主要的就是动目标运动轨迹的3D 显示,因为以前2D 显示,只能在2 维中显示运动目标在经纬度上的变化,而无法对其高度和起伏、横滚等动作进行明确的显示,只能通过其他辅助方式对其进行反映,所以3D 显示的优点就凸显了,它不仅可以显示经纬度的运动趋势,还能反映方位、俯仰、横滚等运动姿态。
2)视角选择(包括大小、方向)
视角选择在3D 动态显示中也起着极其重要的作用,视角选择的好坏,直接决定了能否更直观表现运动目标的运动状态。这里采用多视窗口的方式,从俯视、侧视、正视3 个角度对运动目标的运动情况进行表征,并可以通过开展软件对视角进行调整。
2.2 坐标转换
在3D 可视化显示中,要将GPS 或者北斗等定位系统测量的位置信息在显控软件上进行显示,但由于需求不同,不能直接将测量得到的经纬度直接显示,而是需要对坐标进行相应的处理,以得到需要的相对位置关系,这就要求对坐标进行转换。
1)大地直角坐标系
大地直角坐标系以椭球中心Oe为坐标原点;Ze轴与椭球的旋转轴一致,指向参考椭球的北极;Xe轴位于起始子午面和赤道面的交线上;Ye轴位于赤道面上,与Xe轴、Ze轴构成右手坐标系。3 个坐标轴的指向如图2 所示。

图2 大地直角坐标系
2)自定义坐标系
由于试验中如果采用大地直角坐标系,在界面中显示的目标位置关系不够直观,所以通常并不使用该坐标系,而是根据试验中的具体情况,选用更为直观的自定义坐标系。这就要求在软件中可以设定需要坐标系的原点和显示范围等参数。
3)坐标转换
转换原理简介[2]。将BJ -54 坐标转换为WGS -84 坐标步骤如下:①同一坐标系下,平面坐标到大地坐标的转换。在BJ-54 坐标系下,利用高斯投影坐标反解公式,将矢量地图所采用的在BJ -54 坐标系下的平面坐标(x,y)转化为同一坐标系下的大地坐标(B,L),其中央子午线经度手动设置[3]。②同一坐标系下,大地坐标到三维直角坐标系的转换。在BJ-54 坐标系下,将大地坐标(B,LH)转化为空间直角坐标系下的坐标(X,Y,Z)。③不同基准下,相同坐标系之间的转换。将在BJ -54 坐标系下的空间直角坐标(X,Y,Z)转换为在WGS - 84 坐标系下的空间直角坐标(X,Y,Z),本文采用的是布尔沙模型即七参数转换法,必须已知3 个在BJ-54 坐标系下和在WGS -84 坐标系下的点的空间直角坐标。即3 个平移参数3 个旋转参数一个尺度参数。④同一坐标系下,空间直角坐标到大地坐标的转换。采用迭代算法,由H 和N 的初值算出B,再迭代算出N,H。在WGS-84 坐标系下,将空间直角坐标(X,Y,Z)转换为大地坐标(B,L)。
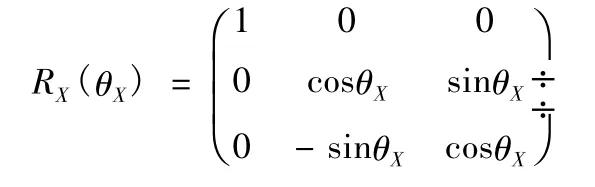
旋转矩阵符号的引入[4]。任意一个空间直角坐标系,可以由原点相同的另一个空间直角坐标系经3 次旋转得到,3个旋转矩阵符号分别表示如下:
保持OX轴不动,按右手规则,Y 轴向Z 轴旋转θX角度
1)保持OY轴不动,按右手规则,Z 轴向X 轴旋转θY角度

2)持OZ轴不动,按右手规则,X 轴向Y 轴旋转θZ角度

3 结束语
随着3D 视景显示技术在试验、作战、演练中的作用愈加重要,在水声领域的应用越来越广,尤其是对水中动目标航迹显示的不断深化,该技术已经成为试验、作战、演练中必不可少的一环。因此,如何更好在运用3D 视景显示技术已经成为水中兵器试验、测试和水声对抗的一个着力点和重点。
[1]沙琪,郑为.3D 视景在鱼雷制导系统半实物仿真中的实现[J].鱼雷技术,2005(9):35-38.
[2]严庆新,黄洁.电子海图制作中坐标转换的应用与实现[J].交通科技,2007(6):113-114.
[3]赵长胜.高斯投影坐标反算的迭代算法[J].测绘通报,2004(3):16-17.
[4]袁智荣.火箭弹制导化中的坐标转换问题[J].测控技术,2009,28(11):91-94.