基于飞机平台的空舰导弹协同航路规划
2015-07-01初丰文
初丰文
(海军航空工程学院研究生四队,山东烟台 264001)
目前,飞机平台的载弹量越来越大,空舰导弹本身也在向智能化方向发展,因此,单架飞机平台具备完成对目标齐射的能力。在军事应用中,通常需要多枚反舰导弹从不同方向对同一舰艇进行攻击。为了使摧毁目标的概率最大,要求所有的反舰导弹同时到达。如何为每一枚反舰导弹生成有效的航迹,并协调各枚导弹的到达时间,是完成攻击任务的前提条件之一[1]。
针对无人飞行器协同航路规划的问题,近年来,国内外学者进行了大量的研究工作[2-6]。对于航路规划中导弹同时到达的要求,多采用飞行器速度调节或者发射时间间隔协调。但由于飞机平台机动性强,且空舰导弹速度一般不可调节,故不能将算法和方法完全移植过来。
本文首先分析了飞机平台空舰导弹协同航路规划的特殊性,建立了飞机平台空舰导弹协同航路规划的模型,并参考前人取得的成就,设计了利用遗传算法求解协同航迹的算法。最后对设计的算法进行仿真实验,证实算法切实可行。
1 问题的描述
1.1 空舰导弹协同航迹规划特点
反舰导弹的使用环境是在海上,攻击目标一般是移动的舰艇,由于环境和目标的变化,使反舰导弹的航路规划存在自身的一些特性;而飞机平台移动速度快,机动性强,区别于陆基、舰艇和潜艇平台,因此空舰导弹的航路规划也区别于普通平台的反舰导弹航路规划。比较明显的特点如下。
1.1.1 整体协同
空舰导弹协同航路规划是与单枚导弹航路规划的最大区别在于合成后的整体“涌现性”[7],这种合成是系统的合成而不是简单的相加。所生成的航路对于每枚导弹来说可能不是最优,但对于导弹编队来说却是最优或者整体最优。
1.1.2 多弹连射
为了实施饱和攻击,必须要求导弹同时到达。空中作战要求飞机在最短的时间内完成导弹发射任务,使飞机尽快脱离战场环境,因此一般采用多弹连射的方法,这种情况下,就需要对各枚导弹航路进行调整,以牺牲航路的最优性为代价,使各枚导弹到达目标点的时间趋于一致。而时间间隔发射的方法(即通过调整各枚导弹的发射时间,使其在到达目标点的时间上趋于一致)虽然可以使每条航路最优,但由于飞机的高机动性,预先规划的导弹发射点在导弹发射时可能难以到达,该方法往往难以用于飞机平台。
1.1.3 纵向简化[4]
在实际使用中,空舰导弹发射后迅速降高,采用低空定高飞行,没有必要安装雷达探测地形,所以通常意义上的地形跟随是没有的,只是在末段攻击时充分利用了导弹的纵向与横向的机动性能。因此,在海上巡航导弹航迹规划中,可以进行一些必要的简化,在隐蔽突防阶段只利用横向的机动性能,航迹规划在二维平面上展开。这一简化将能降低模型的复杂度,减少计算量。
1.1.4 相对简单的地形信息
在海上,低空飞行的导弹需要地形规避是很少的,海上只有少量的岛屿以及其它人工物。在实战应用中,反舰导弹需要地形规避的概率也相对较低,为减小信息量和处理时间,本文在航路规划时不考虑地形规避。
1.2 航迹规划建模
1.2.1 航迹约束条件
基于自身的物理限制和战术使用要求,空舰导弹在飞行过程中需要满足一定的航路基本约束条件,主要包括[1,4]:
1)最小航迹段长度。即导弹在开始改变飞行姿态此前必须保持直飞的最短距离。设最小航迹段长度为lmin,则任意一段航迹的长度都不小于lmin,即

2)最大转弯角。最大转弯角限制了生成的航迹只能小于或者等于预先确定的最大转弯角范围内转弯。该约束取决于导弹的机动性能,设最大允许转弯角为αmax,则

3)最大航迹长度。由于导弹所携带的燃料和执行任务的限制,航迹的长度必须小于或者等于一个预先设定的最大距离。设最大航迹长度为Lmax,则

4)第一段航迹长度约束。为确保导弹能够由发射点准确转入第一个航路点飞行,第一个导航点至发射点的距离应确保导弹能够转入巡航高度上平飞,设lp为导弹发射后转入平飞的最短距离。则

5)最后一段航迹长度约束。导弹到达末制导雷达开机点前必须保证一定的航向,使其能够进入确定的作战方向。设雷达开机点距离为lr。则

6)导航点个数约束。对于空舰导弹,装定导航点最大数量往往受导弹和火控系统的限制,在导弹武器系统研制的过程中一般都确定下来。因此,航迹规划时规划出的导航点数量应不多于规定的导航点数量。即

7)目标进入方向。为达到多方向饱和攻击的目的,通常会给每枚导弹设定进入方向,使导弹按照特定角度接近目标,以实现预期的最大作战效果。为使导弹能够按照预定方向进入目标,可采用限定航路点的方法。如图1 所示。设(Xt,Yt)为目标点,l1为目标与飞机的连线,l2为导弹的航迹,则α 为攻击角,(Xr,Yr)为雷达开机点,由于最后一段航迹长度的约束,要使导弹从攻击角α 进入,导弹必经过点(Xz,Yz)。

图1 目标进入方向示意图
其中:

8)航路无交叉约束。航路交叉可能引起导弹之间可能相互撞击以及导弹的末制导雷达捕捉与之航路交叉的导弹,航路交叉现象也表明导弹增加了不必要的航程,既损失了导弹攻击时间,又违反了航路最短原则。
9)时间协同问题。为了配合其它导弹完成对目标的饱和攻击,往往要考虑多枚导弹几乎同时到达目标点。
10)导弹发射时间间隔问题。飞机火控系统由于自身限制,导弹发射必须有最小间隔时间,而时间协同问题,航路长(攻击角大)的导弹应先发射。
1.2.2 航迹评价指标
根据战术要求,以尽可能短的时间攻击敌舰,要求导弹的飞行距离L 最短,以节省燃料,赢得战争时间。对于导弹协同攻击,要求所有导弹航程的和最短。
对于到达时间的协同问题,本文将时间问题转换为航程问题。由于空舰导弹在巡航状态时,飞行速度基本相等,所以可以将到达时间问题转换为航程问题。由于火控系统自身限制,导弹发射有时间间隔,也必须用航程进行协调补偿。
从上面分析可以看出,可以将航路规划转换为多目标规划问题,利用加权法对目标处理得到航迹代价。

式(9)中:m 为导弹数量;Vd为导弹巡航速度;t 为导弹发射间隔时间;Li为单枚导弹的航程。
2 遗传算法
使用遗传算法对多导弹协同巡逻的航路规划进行仿真。遗传算法的使用包括编码、选择、交叉、变异、重入等过程,针对具体的问题需要进行特定的设计[8]。下面说明本问题使用遗传算法所进行的设计。
1)编码。将所有导弹的航路作为待解的个体,采用距离角度编码的方法,染色体结构如图2 所示。

图2 导弹航路的染色体结构
其中,lm,n为导弹m 每段航路的航程;αm,t为导弹m 的转弯角。考虑到多枚导弹航路之间具有协同作用,因此多枚导弹航路整体作为个体的染色体[9]。
2)适应度的计算。个体的适应度使用式(9)来计算。
3 实例仿真
3.1 仿真条件设定
以300 ×300 km 的作战海区为例,设定如下:
1)飞行速度0.75 Ma,导弹发射时间间隔t=6 s,飞机携带的导弹数量m=4;
2)导弹飞行速度0. 9 Ma,导弹最大转弯角度αmax=60°,雷达开机点与目标距离lr=5 km,最小航迹长度lmin=10 km,导弹发射后转入平飞的距离lp=8 km,导弹航路点n=4(不包含起始点和目标点),导弹最大航程Lmax=400;
3)第一枚导弹发射点坐标为(0,0),目标点坐标(200,0),4 枚导弹攻击角依次为(60°,-30°,30°,0°);
4)λ1=0.5,λ2=0.5;
5)种群数N=100,遗传代数GEN=200,变异概率Pm=0.01,交叉概率Pc=0.9。
3.2 仿真及结果分析
任务规划结果如表1,表2 所示。根据转弯角及航程计算导弹飞行的航路点、飞行距离及耗时,见表3。导弹参考航路示意图如图3 所示。由于导弹依次间隔6 s 发射,因此导弹到达时间间隔不超过3 s,符合实战需求。

表1 各枚导弹转弯角参数(°)
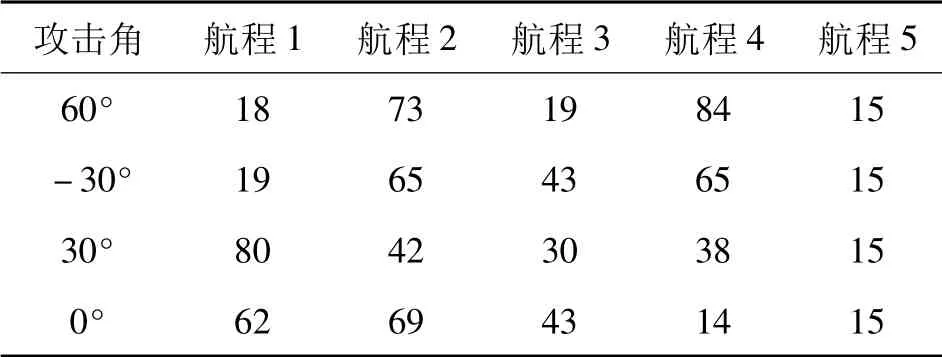
表2 各枚导弹航程参数m

图3 导弹参考航路示意图

表3 航路参数
4 结束语
本文探讨了基于单架飞机平台的空舰导弹协同航迹规划问题。协同攻击的内容包含方向协同和时间协同。为了解决协同问题,方向上的协同转化为限定航路点问题,时间上的协同转化为代价函数。通过遗传算法求解仿真,从仿真结果来看,达到的预期目的。
本文仅研究了单架飞机的导弹航路规划问题,飞机编队的导弹协同航路规划问题将是下一步研究的重点问题。
[1]丁明跃,郑昌文,周成平,等.无人飞行器航迹规划[M].北京:电子工业出版社,2009.
[2]曾家有,宋友凯,车志宇.基于航路规划的反舰导弹发射顺序和间隔研究[J].航天控制,2009,27(2):22-25.
[3]张书宇,张金春,李雪梅.多方向饱和攻击时反舰导弹航路规划方法[J].兵工自动化,2012,31(11):6-9.
[4]王玉林,周绍磊,周超.基于遗传算法的反舰巡航导弹协同航迹规划[J].战术导弹技术,2010(6):1-12.
[5]沈剑锋,刘兴明,吴凌华,等.多平台反舰导弹协同航迹规划[J].战术导弹技术,2009(2):62-66.
[6]王永洁,陆铭华,董汉权,等.单平台反舰导弹协同航迹规划算法研究[J].战术导弹技术,2012(5):67-70.
[7]苗东升.系统科学原理[M].北京:中国人民大学出版社,1990.
[8]沈剑锋,许诚,陈锋.遗传算法在反舰导弹航路规划中的应用[J].飞行力学,2005,23(3):52-55.
[9]巩敦卫,孙晓燕.协同进化遗传算法理论及应用[M].北京:科学出版社,2009:1-3.