基于有色Petri网的RBC行车许可生成建模与仿真*
2015-06-29严建鹏
马 军 严建鹏
(1.兰州职业技术学院,730070,兰州;2.国电南瑞科技股份有限公司,210061,南京∥第一作者,副教授)
0 概述
CTCS-3级列控系统是我国300~350 km/h高速铁路的重要技术装备。它通过GSM-R(面向铁路的全球移动通信)无线网络实现车地通信,实现列车运行的闭环控制,为列车的安全、高效运行提供给了可靠的技术保证。作为CTCS-3级列控系统地面部分的核心设备,RBC(无线闭塞中心)最重要的功能是负责接收辖区内列车位置报告,根据运营场景计算列车的行车许可(Movement authority,简为MA),并发送给对应列车。行车许可是指列车从当前位置开始向前运行所能到达的最远距离,以及该段线路范围内最高速度限制等行驶权限的命令信息。它是列车安全运行的行车凭证[1],是RBC 对列车运行状态进行实时控制的基础。列车是否能够安全运行,关键在于RBC 能否向车载设备提供全面、正确、可靠的行车许可。因此,分析行车许可信息生成过程,搭建一个仿真试验模型以便研究系统性能、寻求列控技术的改进方法,具有重要的理论意义和实际价值。
在我国现有技术文献中,对CTCS-3级列控系统RBC行车许可生成问题已有多人进行了分析和研究,采用的方法也各不相同。文献[2]对RBC行车许可功能模块进行了划分,采用安全状态机建立了不同场景下的 MA 计算模型,并用UPPAAL软件验证了模型的合理性。文献[3]在RBC仿真平台基础上,建立了行车许可生成的UML(统一建模语言)模型,并按照不同的功能需求,对MA 进行了建模,利用仿真平台对模型进行了验证。文献[4]采用随机Petri网对行车许可数据完备性进行了建模,并采用TimeNet 4.0仿真软件,对模型进行了仿真分析。文献[5-6]采用有色Petri网(Colored Petri Nets,简为 CPN)对行车许可生成过程进行了建模,通过赋时模型分析了GSM-R 网络质量对行车许可生成的影响。文献[7-9]则更偏重于系统的功能实现,定量分析系统性能。这些研究成果为行车许可相关问题的深入研究奠定了基础。
当前,对于行车许可的相关分析主要采用了测试集成平台模块分析和形式化建模两种方案。相比而言,形式化建模更具灵活性,也比较容易实现。而在众多的形式化建模方法中,CPN 具有严格的语义逻辑,适合于描述同步、并发、实时的系统模型[8];同时借助于成熟的图形化分析工具,不仅便于修改,而且还可以加入时间参数,构造时间序列,研究系统实时性,进行定量分析。为了进一步分析系统性能参数对行车许可生成的影响,需要建立一个相对完整的仿真试验平台。本文采用动态仿真性能较好的CPN 分析方法,根据CTCS-3级列控系统不同运营场景,搭建完全监控模式、RBC 交接模式、等级转换模式、临时限速模式、引导模式以及自动过分相六种场景下的MA 生成模型;再运用动态仿真和状态空间分析工具,对模型的正确性进行验证。
1 模型的结构设计
通常在CTCS-3级列控系统控车时,RBC 需要根据列车运行的不同状态和前方线路条件,实时计算MA 并发送给对应的列车。但为了满足不同的运营需求,CTCS-3级列控系统中设计了14种运营场景,而各种场景下对MA 的需求存在差异。在一些特定的场景中,MA 的生成还需要添加相关的场景数据包,才能得到正确的MA 信息。根据研究对象的技术特点,结合CPN Tools模块化分层建模思想,利用替代变迁将CTCS-3级列控系统中主要的完全监控模式、RBC 切换模式、等级转换模式、临时限速模式、引导模式以及自动过分相6种场景下的MA 生成过程划分为6个子模型,不仅有利于整体建模,而且可以对子模型逐步进行细化,有利于模型的扩张和功能的完善。MA 生成过程总体计算流程如图1所示。

图1 MA 生成过程总体流程图
图1反映了从列车发送MA请求信息到收到RBC计算的MA 并检查执行的整体过程,但这只是对系统单次运行过程的描述。实际上,随着列车不断向前运行,RBC 必须实时更新列车MA,并及时发送给车载设备。因此,实际建模中,需要将系统设计成具有回归性的可循环模型,以便准确描述系统行为。
2 基于CPN的MA生成模型
2.1 MA生成顶层模型
根据上述建模方案,设计MA 生成顶层模型来描述列车向RBC 发送当前位置、列车基本参数和行车许可请求信息,RBC 接收到请求后与相关设备交换信息并获取前方线路条件,再根据当前列车运行场景进入对应的MA 生成子模型计算MA,最后通过GSM-R 无线网络发送给列车的过程,如图2所示。在图2中:库所“Train”代表车载设备状态,具有初始 Token(状态),即图2 中的“1`″Message 132″”;变迁代码段规定了变迁的输入与输出信息,有向弧上的注入式表示变迁触发需满足的条件和传递的信息;替代变迁“Data prepare”描述的是RBC为计算行车许可进行数据准备的过程,替代变迁“FS MA”、“Handover MA”、“C3/C2 MA”、“TSR MA”、“CO MA”、“Pass NZ MA”依次代表完全监控模式下 MA 生成子模型、RBC 切换模式下 MA生成子模型、等级转换模式下MA 生成子模型、临时限速模式下MA 生成子模型、引导模式下MA 生成子模型以及自动过分相模式下MA 生成子模型。
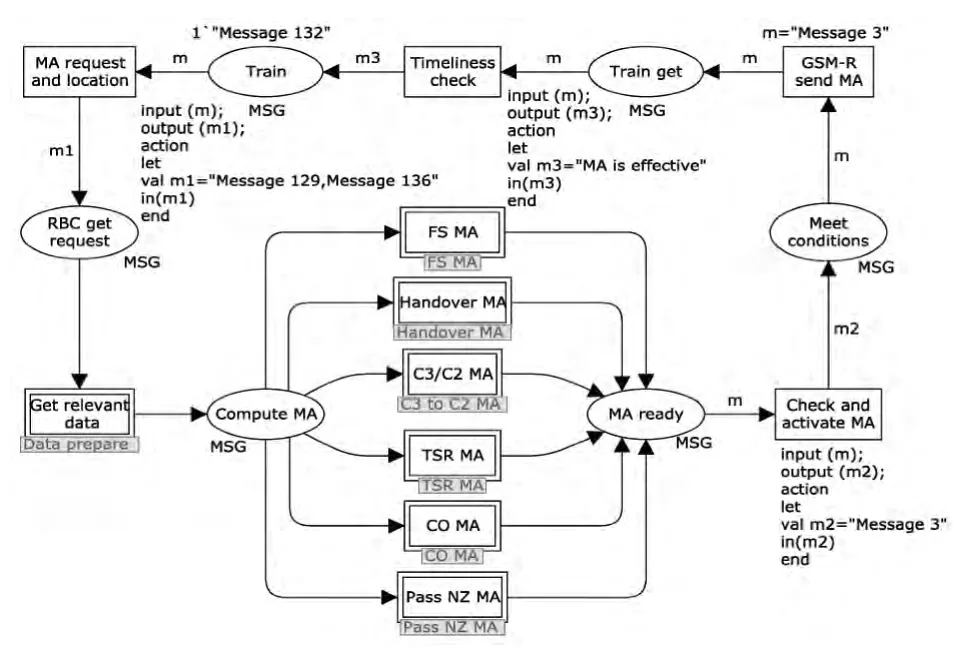
图2 MA 生成顶层模型
当MA 生成顶层模型得到激励被触发后,库所“Train”中的初始 Token 通过变迁“MA request and location”向下传递,模拟列车向RBC 发送 MA 请求信息包Message 132,同时向RBC发送列车基本参数信息包Message 129和位置信息包Message 136。库所“RBC get request”表示RBC接收到列车信息的状态。库所“Compute MA”表示RBC获得相关数据,并根据列车运行状态判断运营场景的状态。库所“MA ready”表示行车许可计算完毕并生成MA 信息包的状态,变迁“Check and activate MA”模拟了 RBC 根据标准对MA进行检验并激活的过程。当发送条件满足时,MA 信息包 Message 3通过 GSM-R 发送给对应列车。库所“Train get”表示列车接收到MA 信息,变迁“Timeliness check”模拟了车载设备对MA进行实时性检验,判断接收到的MA信息是否过期。如MA未过期,则列车按照接收到的MA 生成速度控制曲线,监控列车向前运行。库所“Train”接收到信息m3后,变迁“MA request and location”再次被触发,模拟列车不断前行时随着位置的改变,继续向RBC报告当前位置并发送MA 请求。这样使得模型能够反复模拟MA生成过程,构成闭环模式,使模型中的变迁具有了回归属性。
2.2 RBC数据准备子模型
替代变迁“Data prepare”描述了RBC 接收到列车MA 请求,定位列车当前所处位置,并根据列车运行方向和前方线路条件,生成列车串路径,并实时更新路径的过程。在此过程中,RBC 需要从联锁、CTC(中央调度集中)线路数据库等相关设备处获取列车运行前方信息,为计算行车许可做好数据准备。图3 为替代变迁“Data prepare”对应CPN子模型,其对上述过程进行了具体的形式化描述。图3中,库所“LRBG position”、“Get line data”、“Train path”、“Train position”分别表示获取LRBG(最近相关应答器组)位置、获取线路描述信息、串路径、定位列车等一系列数据准备;变迁“Update path”描述了更新串路径的过程。

图3 RBC 数据准备子模型
2.3 完全监控模式下MA生成子模型
列车在完全监控模式下具备控车所需的全部基本数据,这是CTCS-3级列控系统的主要运营模式。当RBC数据准备完毕,判断列车当前处于完全监控模式时,进入完全监控模式下MA 生成子模型为列车计算MA,如图4所示。
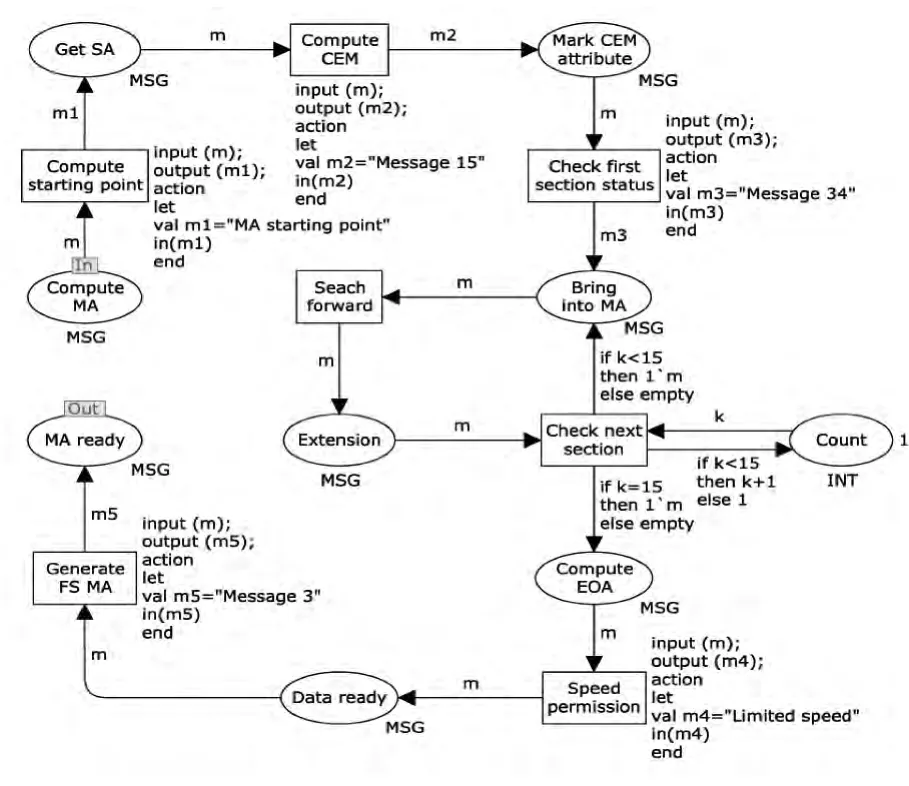
图4 完全监控模式下MA 生成子模型
在图4的模型中,首先确定MA 起点,再根据联锁系统的信号授权计算CEM(有条件紧急停车消息)并标记,然后从车头开始沿列车运行方向依次向前延伸MA区段。模型中设置循环处理环节来模拟RBC进行MA区段延伸的过程,其中由库所“Count”负责对轨道区段遍历个数进行统计。由于CTCS-3级列控系统中MA最多包含15个闭塞分区,因此当闭塞区数k=15时,区段遍历完毕,MA 包含区段个数达到最大。同时,RBC对区段状态空闲状态、有无信号授权逐次进行判断,以计算行车许可终点(EOA)。此后,RBC根据线路限速信息计算MA 覆盖区域内区段的最高限制速度,得到MA 中所有数据。最后,RBC根据 MA 信息包标准格式生成 MA 信息包Message 3,返回顶层模型并继续向下传递。
2.4 RBC切换模式下MA生成子模型
当列车运行至相邻两个RBC 边界区域时,随着控制权的移交,MA 的计算也随之变化。RBC 切换过程分为嵌套通信方式和直接通信方式两种,同时根据GSM-R 无线电台工作状态,又可分为单电台切换和双电台切换。无论用那种切换方式,对于MA 的需求都是一样的。设 RBC1 为移交方,RBC2为接收方,根据系统需求,当列车到达切换预告点(LTA)时,RBC1向RBC2发送移交预告和进路请求信息,同时为列车计算延伸MA。当列车到达切换点(RN)时,发送切换信息包 Message 131,RBC1与RBC2交接列车控制权,由RBC2接管列车,并为列车计算MA。RBC切换模式下MA 生成子模型如图5所示。
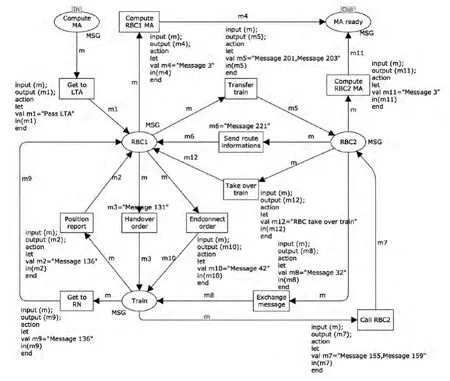
图5 RBC 切换模式下的MA 生成子模型
2.5 等级转换模式下MA生成子模型
为了满足高速列车跨线运行的需求,同时兼顾列车运行安全,列车从 CTCS-3 区段进入 CTCS-2区段或者由 CTCS-2 区 段 进 入 CTCS-3 区 段 时,需要进行列控系统等级转换。根据等级转换模式下MA 需求建立的等级转换模式下MA 生成子模型,描述了列车通过等级转换边界时MA 的生成过程,如图6。
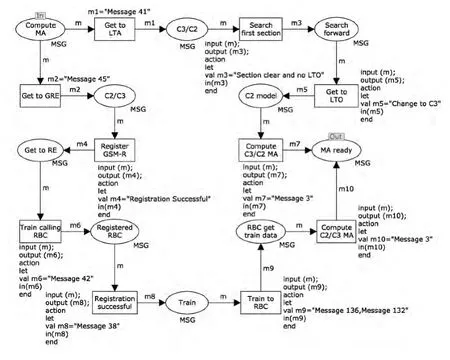
图6 等级转换模式下的MA 生成子模型
其中由CTCS-2区段进入CTCS-3区段时,列车需要在到达GSM-R 链接注册信息应答器组(GRE)时,发送信息包 Message 45 注册 GSM-R无线网络。网络注册成功,列车到达RBC 连接应答器组(RE)时,列车发送信息包 Message 42 与RBC建立通信会话。会话建立后,列车向RBC 报告当前位置和基本参数,发送信息包Message 136和Message 132。RBC 收到列车信息后,为列车计算等级转换模式下的 MA,并生成 MA 信息包Message 3,返回顶层模型。
2.6 临时限速模式下MA生成子模型
临时限速命令由CTC 临时限速服务器产生,包括临时限速起始位置、限速等级、限速时间段、限速类型以及其他文本信息等。当列车接近时,RBC 计算MA 的过程就需要加入临时限速信息,并判断临时限速状态,最后将包含临时限速信息的MA 发送给列车,以保证列车能够安全通过限速区域。临时限速模式下MA 生成子模型如图7所示。图7中,变迁“Search TSR section”描述了RBC 沿进路授权方向查找区段临时限速信息的过程;变迁“TSR effective”和变迁“TSR noneffective”分别描述了区段执行临时限速和撤销临时限速的两种情况;库所“Data ready”表示限速信息已获取,准备计算MA。
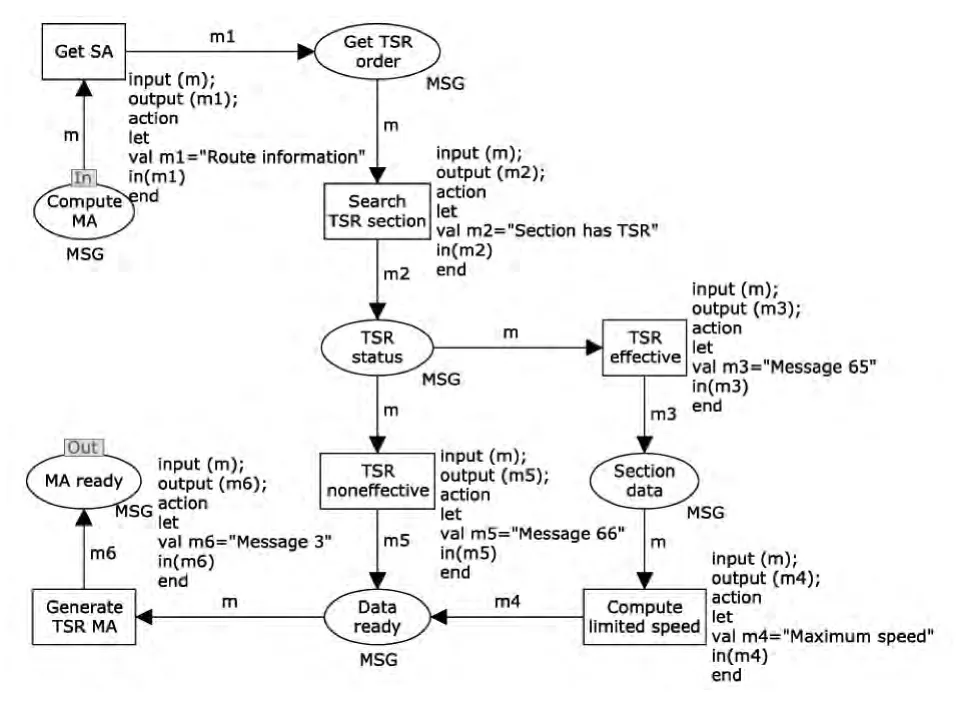
图7 临时限速模式下MA 生成子模型
2.7 引导模式下MA生成子模型
CTCS-3级列控系统中规定,当开放引导信号或出站信号机开放且列车前端距离出站信号机大于250 m 发车时,列控系统需要启动引导模式监控列车运行。此时,RBC 对MA 的计算也需要按照引导模式下的要求来进行。首先,需要根据联锁信号授权确定引导进路类型,如果接车进路为引导进路,则标记列车车头至进路始端引导区段,并依次逐个向前延伸;最后,添加引导模式限速曲线信息,生成引导模式下的MA 信息,返回顶层模型。引导模式下MA 生成子模型如图8所示。
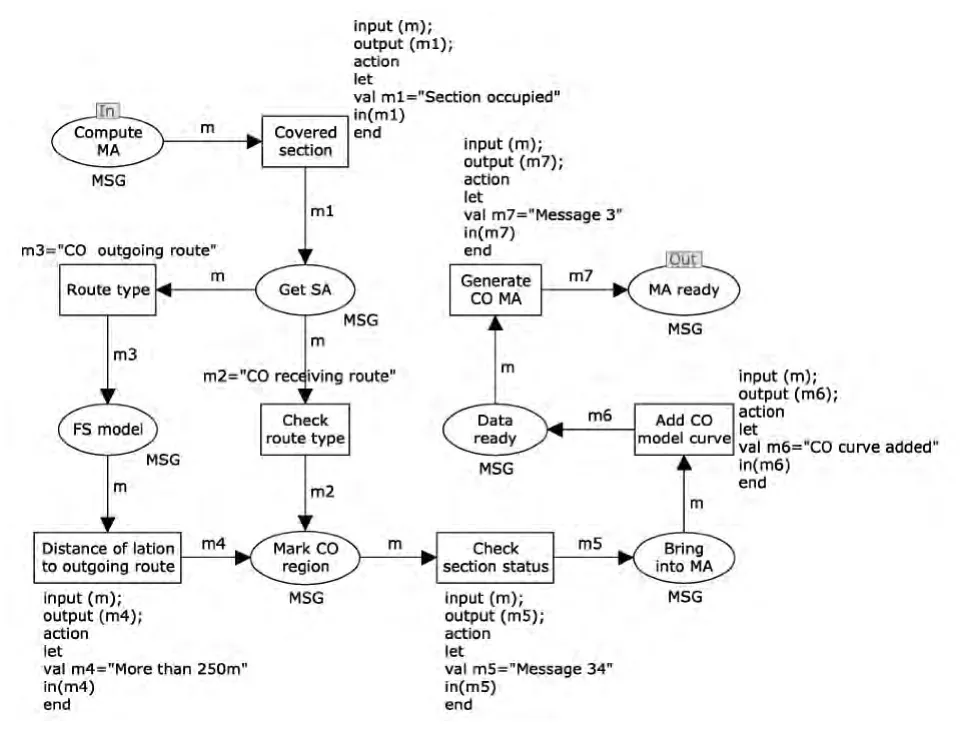
图8 引导模式下MA 生成子模型
2.8 自动过分相模式下MA生成子模型
自动过分相场景是列控系统根据地面设备和线路数据库提供的分相区信息,在列车接近分相区一定距离范围内向列车发送分相区预告信息,并驱动列车以一定的动能闯过分相区,以防止列车停在分相区而造成行车事故。在自动过分相模式下,RBC对MA 的计算必须要考虑分相区位置和长度等信息,EOA 的计算一定要避开分相区,并满足列车在分相区外方停车的要求;同时还需要向列车提供当前位置距分相区的距离,以便列车提前加速,储备足够的动能。自动过分相模式下MA 生成子模型如图9所示。
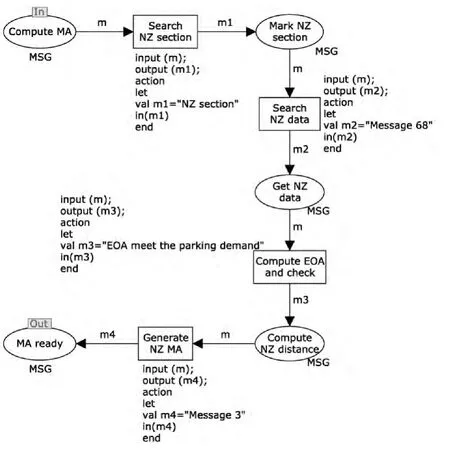
图9 自动过分相模式下MA 生成子模型
3 模型的仿真及状态空间分析
利用CPN Tools中动态仿真工具对模型进行仿真,通过单步仿真和自动仿真,可看出模型中Token的流动符合设计意图,能够正确反映MA 生成过程,并可以循环模拟车地通信;同时利用状态空间分析工具对模型进行评估,得到相应的状态空间报告。状态空间报告一共分为五部分:状态空间信息统计、有界性报告、回归性报告、活性报告及公平性报告,具体结果如图10~图13所示。从图10中可以看出,模型中一共有76个节点和108条弧,全部处于可触发状态。图11反映了模型运行过程中对有关资源容量的要求,可以看出Token到达网络中任意位置都能够满足有界性,不存在资源溢出的情况;同时也证明了,本文所建 MA 生成的CPN 模型是安全、有界的。图12表示模型循环运行中初始标识能够返回规定的初始状态,模型中节点全部能够被触发,不存在死锁现象。图13反映了模型中各变迁发生频率相对公平,系统资源无饥饿问题。

图10 状态空间信息统计结果
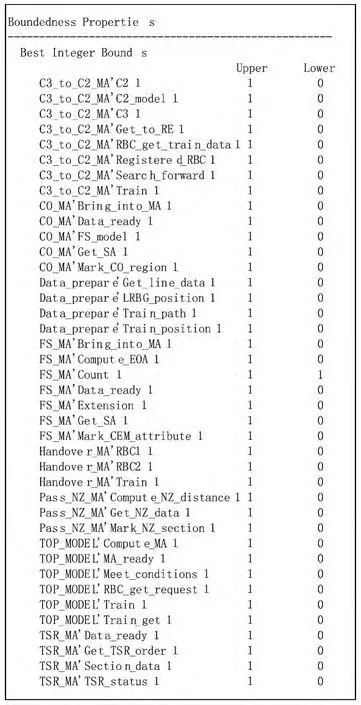
图11 模型状态空间有界性报告
以上分析结果表明,本文建立的基于CPN 的列车行车许可模型是正确的,能够满足CTCS-3级列控系统MA 生成需求,从逻辑功能上能较好地描述了不同场景下MA 的生成过程,为列控系统的深入研究提供了一个较好的仿真平台,也为系统相关软件的开发提供了理论参照。
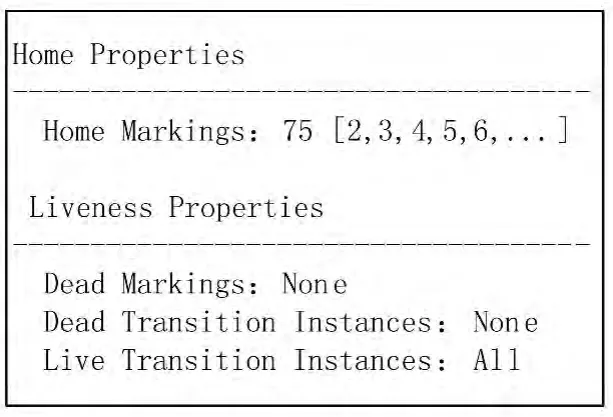
图12 模型状态空间回归性与活性报告
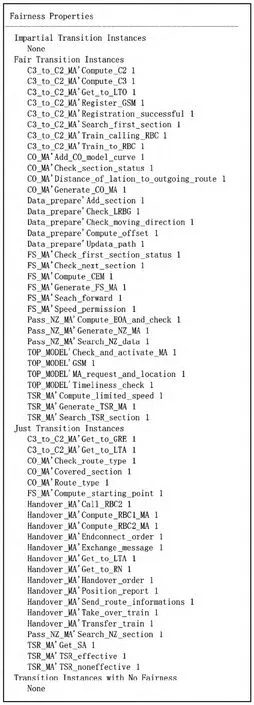
图13 模型状态空间公平性报告
4 结论
本文利用有色Petri网建模工具CPN Tools建立了六种不同运营场景下的MA 生成模型,其简洁易扩张,能够较好地描述RBC 生成 MA 以及车地之间MA 信息的传输过程;同时能够循环动态仿真MA 生成过程,可以实现对系统的定性分析,对研究系统性能、改进设计方案具有一定的参考价值。在所建模型上,通过添加时间参数、设定优先级等技术修改,还可以对系统的性能进行定量分析。但相比实际信息处理过程,所建模型仍然过于简单,还需要根据实际进一步细化、改进和完善。
[1]张曙光.CTCS-3级列控系统总体技术方案[M].北京:中国铁道出版社,2008.
[2]耿鹏.基于安全状态机的RBC系统行车许可模块的建模与验证[D].北京:北京交通大学,2009.
[3]陈燕.无线闭塞中心行车许可生成方法研究与实现[D].北京:北京交通大学,2011.
[4]张栋.基于SPN 的RBC 行车许可数据完备性建模和分析[D].北京:北京交通大学,2011.
[5]张爱玲,徐智,宗岩,等.基于CPN 的切换模式下行车许可生成过程研究[J].计算机技术与发展,2012(4):157.
[6]张爱玲.CTCS-3级列控系统RBC 行车许可生成的形式化建模与分析[D].兰州:兰州交通大学,2012.
[7]牛儒,曹源,唐涛.ETCS-2级列控系统RBC 交接协议的形式化分析[J].铁道学报,2009(4):52.
[8]陈磊,宁滨,张勇,等.基于有色Petri网的CBTC 系统列车追踪过程建模与仿真[J].系统仿真学报,2009(3):637.
[9]张友兵,唐涛.基于有色Petri网的CTCS-3 级列控系统RBC切换的建模与形式化分析[J].铁道学报,2012(7):49
[10]李俊娥,李丽兰.列车控制系统中的行车仿真计算[J].城市轨道交通研究,2013(1):46.