城市轨道交通运营安全模拟沙盘列车模型控制系统的设计*
2015-06-28陈岳剑邢宗义
陈岳剑 邢宗义 黄 超
(1.南京理工大学机械工程学院,210094,南京;2.同方人工环境有限公司,100080,北京∥第一作者,硕士研究生)
运营安全是城市轨道交通的基础。城市轨道交通运营安全模拟沙盘可以模拟不同类型的事故或危险环境,并可进行不允许实际发生的重大事故的仿真实验,从而为城市轨道交通安全运营积累经验和提供技术支持,在实际运营中减少或避免安全事故。城市轨道交通运营安全模拟沙盘的核心是列车模型控制系统,通过该系统实现运营图模拟、列车救援等功能。对列车模型控制系统功能的基本要求是能够控制列车模型、道岔和信号灯,准确判断列车位置。
列车模型控制系统的功能通过工控机、可编程逻辑控制器(PIC)和单片机等实现[1-5]。文献[1]开发的城市轨道交通综合实训系统采用工控机控制沙盘站场设备,采用AT 96 总线连接各工控机,并设计了列车、信号灯和道岔控制电路。文献[2]开发的轨道交通实验控制系统采用工控机作为主站进行控制:由工控机通过功率输出板实现信号机和道岔转辙机的输出控制,并同时用于驱动轨道供电电路的继电器,实现列车的正反向行驶;通过开关量输入板实现列车位置等信息的采集。采用工控机实施控制存在成本高、通用性差的缺点,不利于推广应用。文献[3]开发的城市轨道交通ATC(列车自动控制)模拟系统采用调制解调器产生的轨道电流信号控制列车,采用MSP 430 单片机控制道岔、信号灯和列车定位,在PC(电脑)端运行调度软件实现各个被控对象的模拟控制。但该系统未考虑分布式控制,现场道岔信号灯均集成在一块控制板上,导致场景内走线杂,系统可维护性较差。文献[4]开发的铁路运输综合演练沙盘采用C8051F330 单片机控制道岔、信号灯和进行区间定位,通过单片机控制接触网供电从而对机车进行控制。但该系统未应用数字电流控制技术,且机车采用接触网与干电池联合供电,使得系统兼容性较差。
本文提出一种基于485 总线的PIC 单片机分布式列车模型控制系统设计方案。根据城市轨道交通运营安全模拟沙盘仿真需要,该系统实现了列车模型方向及速度控制、道岔与信号灯控制、列车位置探测,并可通过串口与PC 端的上位软件互联,实现基于PC 端软件的列车模型控制。
1 列车模型控制系统设备基本原理
列车模型控制系统的设备主要包括列车模型、道岔、信号灯、道岔转辙机、列车定位设备等。由于主流的列车模型已经配置了解码模块,因此,本文只介绍列车模型数字命令控制的原理,不再进行列车解码器的开发工作,本节也不再赘述列车模型的基础知识。信号灯一般采用简单的发光二极管,采用开关量输出驱动显示,道岔根据实际需要采购现成的产品,因此本文对此也不再进行详述。道岔转辙机和列车定位有多种实现方式,实现方式是列车模型控制系统的核心,下文分步进行原理介绍及优缺点分析。
1.1 列车模型数字直流控制
在列车模型控制系统中,模型列车通过金属车轮获取加载在轨道上的驱动电流,实现列车的速度及方向控制。
根据电流信号的不同,列车模型控制可分为直接直流控制(Direct Current,简为DC)和数字命令控制(Digital Command Control,简为 DCC)[6]。早期的DC 控制属于模拟控制,通过加载电流的大小和极性实现列车的速度和方向控制,但在同一区间内DC无法实现不同列车的独立控制,且存在低速时列车运行不平稳等缺点,因此DC 控制只能用于简单的展示沙盘等场景。在DC 基础上发展完善的DCC控制,采用在轨道上加载数字电流信号的方式实现了对列车模型的控制。列车模型对轨道的数字电流进行整流后作为驱动电源,同时通过解码器获取列车地址、运行方向及调速信号,实现了模型列车的独立控制。
DCC 的电流信号由方波信号调制而成,如图1所示。方波幅值根据不同比例的列车模型确定,如HO 比例的列车模型对应的方波幅值为14.5 V。在方波电流信号中,短波代表1,其周期为116 μs;长波代表0,其周期为232 μs;延伸0 代表数据包结束,周期在 95 μs 至 9.9 ms 之间。

图1 DCC 信号时序示意图
数字命令控制DCC 数据包由引导位、地址字节、数据字节、校验字节组成,其中引导位由大于14 位的1 组成,数据字节不大于4 且每个字节由0 间隔。DCC 信号除了实现传统的列车速度与方向控制、列车灯光与音效控制、信号灯道岔解码操作外,还可以针对地址字节实现车头解码变量配置等功能。
1.2 道岔转辙机
在列车模型控制系统中,道岔转辙机可分为舵机转撤和电磁转撤2 种。舵机转撤是在轨道上安装小舵机,通过连杆机构实现道岔的转撤控制,但存在舵机机械安装复杂、故障率高、扳道时间较长等缺陷。电磁转撤是在道岔附件上安装2 个电磁线圈,通过线圈内部的卡簧实现锁闭功能,当需要进行转辙时,控制系统对应的驱动电路输出电流至电磁线圈,并克服卡簧的锁闭,从而带动叉芯位移实现道岔转辙。道岔转辙机可采用DCC 传输控制信息,然后通过专门的解调单元实现控制,也可以直接由专门控制板卡实现。
1.3 列车模型定位
列车模型定位是指对列车位置的反馈探测,是实现区间闭塞控制的基础,主要有机械微动开关、电流判断、光电传感器、霍尔传感器以及干簧管等定位方法。机械微动开关方式是在轨道上铺设机械触点,列车经过时接触式检测出列车位置,该方法存在机械开关寿命短且接触式检测影响列车运行等缺点。电流判断方式是将轨道划分为若干个区间,并实现不同区间的物理电隔离,当列车处于某区间时,由于轨道供电会造成该区间轨道电流变化,从而可通过电流检测实现列车定位。光电传感器方式是在轨道区间内铺设光电对管,当列车经过时,光电对管的信号经列车底部反射,经信号调理电路生成0 或1 信号,从而进行列车有无判断,实现列车定位。霍尔传感器方式与光电对管类似,在列车底端安装一小块磁铁,当列车经过时霍尔传感器由于磁场变化产生霍尔电势差,经信号调理后产生0 或1 信号。干簧管方式同样是在列车底端安装一小块磁铁,当列车经过时,磁铁使得干簧管的簧片磁化,簧片触点被磁力吸引,常开触点状态转换为吸合,从而进一步经由数字量输入模块实现列车定位。干簧管结构简单、体积小、寿命长、工作可靠,已经成为非接触式列车定位的主要方式。
2 列车模型控制系统架构及关键技术
2.1 单片机选型
根据列车模型控制系统的需要,本文选用美国微芯公司的PIC16F628A 单片机作为调制解调板和道岔解码板等的核心控制器。该单片机具有精简指令集和哈佛总线,自带2048 字节的闪存程序存储器、224字节的SRAM 和128 字节的EEPROM,除此之外还有16 路I/O、RB 口电平变化中断、3 路定时器和可寻址的通用同步/异步收发器等资源,可完全满足列车模型控制系统中解码编码板的主控制器要求。
2.2 列车模型控制系统架构
列车模型控制系统主要由电脑接口板、调制解调板、区间编码板、信号灯解码板和道岔解码板,以及传统的列车模型、道岔、转辙机、信号灯和轨道组成,如图2所示。电脑接口板实现上位机与单片机之间的通信,并直接读取区间编码信息。调制解调板作为控制中心,接收上位机控制指令或扩展接口连接的其它控制站的指令,将电流信号调制为标准的DCC 信号加载到轨道。区间编码板实现对干簧管开关信号采样编码。信号灯和道岔解码板实现对轨道DCC 对应信号的解码,以实现信号灯和道岔转辙机控制。上位机运行列车模型控制软件,通过电脑串口发送指令,实现列车自动控制、救援调度等功能。
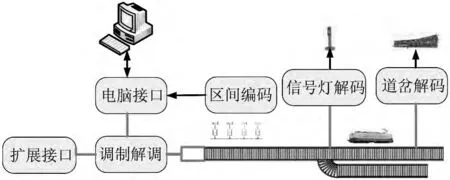
图2 列车模型控制系统架构
控制系统的结构遵循了分布式设计,逻辑上可以分为3 个系统:以调制解调板为主控站的串行总线多机通信系统、分布式级联的区间编码系统以及信号灯道岔DCC 信号解码系统。
2.3 串行总线多机通信系统
本文设计的串行总线多机通信系统的总线连接方式。总线标准遵循RS 485 半双工异步通信协议,采用平衡驱动器和差分接收器组合传输,抗共模干扰能力强,在1 Mbit/s 传输速率下最远有效距离可达100 m,并可允许最大挂载32 台设备,完全满足城市轨道交通运营安全模拟沙盘的需要。PIC 单片机通过美信公司MAX 485 芯片挂载到总线。可将调制解调板视为主机,而电脑接口板与手持遥控器、功放板和场景音效设备等可作为从机。PIC 单片机的可寻址通用同步/异步收发功能可对数据进行第9 位地址区分,使接收器自动寻址产生接收中断,提高了总线传输效率。本文设计的串行总线多机通信系统支持分布式扩展,可以遵循总线标准挂载多块调制解调板和电脑接口板等主从设备。
3 硬软件设计
3.1 电脑接口板设计
电脑接口板由USB(通用串行总线)转换接口、485 总线接口、PIC 单片机和区间编码读取接口组成。由于PIC16F628A 单片机未集成USB 接口功能,因此本文采用FTDI 公司的FT232BL 接口转换芯片实现USB 转换。区间编码读取接口采用德州仪器生产的8 路双向非门集成芯片SN74LS245N。该芯片的传输方向控制引脚T/R 接高电平,从而定义芯片的A 引脚为输入,定义B 引脚为输出;该芯片的 B7、B6 和 B5 与单片机的 RST(复位)、LOAD(装载)和CLOCK(时钟)连接,实现单片机输出控制,A4 与单片机的DATA(数据)连接,实现数据输入读取控制。
3.2 调制解调板设计
调制解调板由 DCC 调制电路、PIC 单片机和485 总线接口组成。列车及信号灯、道岔等控制信号,经由单片机两个I/O 口,结合58μs 定时器进行DCC 信号的时序调制,然后经功率放大后加载到轨道。功率放大选用了意法半导体公司的全电机驱动芯片L 6203。L 6203 的最高工作电压为48 V,最高工作电流为5 A,切换频率为100 kHz,放大后的DCC 信号能驱动10 台HO 比例的列车模型,满足了本文沙盘系统的需求。
3.3 信号灯与道岔解码板
信号灯解码板与道岔解码板均包含解调电路、单片机和输出控制接口。采用光耦6N137 作为解调电路的输入隔离,其最高切换速度为10 Mbit/s,完全满足DCC 解码要求。轨道中的DCC 信号作为元耦6N137 的输入,其输出连接到单片机的RB 口。单片机通过电平中断和58 μs 定时器一起完成DCC信号解码。单片机输出口的控制信号,经ULN 2803达林顿管芯片功率放大后,实现信号灯点亮或道岔转辙机线圈上电。
3.4 区间编码板设计
区间编码板由前端触发电路和后端串/并入串出电路组成,实现对列车有无的1/0 信号编码。8路干簧管并行信号接入由两片RS 触发器CD4044B的S1-S4 口,并在每个端口处接10 kΩ 限流电阻、100 kΩ 上拉电阻和10 nF 消抖电容;触发器的R 口实现复位功能,在系统初始化时所有触发器的输出均复位为0;触发器的输出Q1-Q4 接串/并入串出编码芯片CD4014B 的P0-P7。CD4014B 芯片的低级串入口支持低级编码板的数据输入口,低级的串出口接高级编码板的串入口,从而实现了多块编码板的级联功能。本文设计的区间编码板共有4 块CD4044B 触发器和2 块 CD4014B 编码芯片,支持16 路干簧管信号,在满足功耗及读取时间要求的前提下,最大可级联8 块区间编码板,可实现128 路干簧管信号的编码。
3.5 485总线通信协议
在485 总线通信协议中,调制解调板作为主机工作,电脑接口板等作为从机工作。主机的程序定期轮询系统,查看是否有新从机设备挂载到总线。主机实现列车速度与方向、信号灯、道岔等状态信息的存储,以及DCC 信号调制功能。当从机向主机发送状态信息查询时,主机负责将对应的列车、信号灯等状态信息回馈给从机,当从机向主机发送控制命令时,主机负责将该命令调制为DCC 信号加载到轨道。
3.6 上位机软件串口通信
城市轨道交通运营安全模拟沙盘的上位机软件基于VS 2008 开发环境的MFC 编写,上位机软件通过串口向调制解调板发送查询或控制命令。本文采用通信控件MSComm 实现串口通讯,其串口初始化及数据收发过程如下。
3.6.1 串口初始化
(1)选择串口号:put__CommPort();
(2)设置通信方式为:9 600 kbit/s,无校验,8位数据位,1 个停止位,put_Settings();
(3)以二进制方式检取数据:put_InputMode();
(4)设置串口接收缓冲区中有多于或等于1 个字符时将引发一个接收数据的OnComm 事件:put_RThreshold(1);
(5)设置接收全部数据:put_InputLen(0);(6)打开串口:put_PortOpen(1)。
3.6.2 数据收发
串口每接收到一个字节数据后便触发OnComm事件,在该事件的消息响应函数中编写相关接收子程序。发送数据通过put_Output()子程序,将数据转换为Variant 类,并进行 COleVariant 封装。发送完成后等待电脑接口卡应答确认接收指令或状态数据包,若在规定的时间内未收到应答数据则假设数据发送失败,重新进行数据发送。
4 试验
为验证列车模型控制系统各板卡的功能,在实验室搭建了功能测试环境。基础环境包括2 辆由德国Fleischmann 公司生产的ICE 4460 火车模型,3 个道岔和对应的电磁转辙机,5 个LED(发光二极管)自制信号灯,环形轨道;控制系统包括电脑接口板、调制解调板、区间编码板、信号灯解码板和道岔解码板等5 块本文开发的控制板卡。在上位机基于MFC 编写的单文档软件界面如图3所示。试验结果表明,采用本文所介绍的控制系统,可以实现列车模型的独立正反向控制和128 级调速控制、信号灯点亮和道岔转辙控制、列车区间位置反馈等功能,从而验证了本文开发的板卡的有效性。

图3 上位机界面
在城市轨道交通运营安全模拟沙盘中,采用本文所介绍的列车模型控制系统进行列车控制,除实现测试环境的功能以外,也成功实现了列车定点停车、故障列车拖挂救援、列车应急声光报警等功能,满足了安全模拟沙盘的需求。
5 结语
本文提出了一种利用PIC 单片机进行列车模型分布式控制系统设计的方案,该系统实现了列车模型的定位与控制、信号灯与道岔控制、应急救援控制等功能。在测试环境及模拟沙盘中进行了列车模型控制试验,结果验证了该系统的可用性,能够满足城市轨道交通运营安全模拟沙盘的列车模型控制的需求。
[1]秦武.城市轨道交通综合实训系统的设计与实现[J].城市轨道交通研究,2013(1):77.
[2]翟国锐.轨道交通实验控制系统的研究[D].北京:北京交通大学,2008.
[3]邸鹏.城市轨道交通的ATC 模拟系统设计[D].南京:南京理工大学,2010.
[4]张博,王思明,肖健华.基于C8051F330 的铁路模拟沙盘的设计与开发[J].科学技术与工程,2008(3):700.
[5]张占军.铁道信号沙盘模拟显示系统研究[D].成都:西南交通大学.2009.
[6]NMRA.DCC Signal Standard S-91.S-92[S].
[7]吴玲英.叶华平.李立明,等.基于 DCC 及 C-S 模型的城轨运营仿真系统设计[J].沿海企业与科技,2012(7):38.
[8]李绍斌.蒋大明.铁路运输沙盘综合演练联锁系统的设计和实现[J].中国铁路,2005(6):39.
[9]闫保中,杨欣颖.基于VC 的地铁智能沙盘控制系统设计[J].应用科技,2009(10):34.
[10]Yulong J,Jiaqiang Y.Design an intelligent environment control system for greenhouse based on RS485 Bus[C]//Digital Manufacturing and Automation (ICDMA)Second International Conference on.Guilin:IEEE,2011.
[11]冯子陵,俞建新.RS485 总线通信协议的设计与实现[J].计算机工程,2012.
[12]Kai SQC.Design of the multi- computer communication system based on RS485 [C]//Electric Information and Control Engineering (ICEICE)International Conference on.Wuhan:IEEE,2011.
[13]龚建伟.Visual C+ + /Turbo C 串口通信编程实践[M].北京:电子工业出版社,2007.
[14]张波,武国斌,朱永忠.USBUART 芯片 FT232BM 及其应用[J].电子质量,2004(2):1.
[15]余孝安,夏彬.基于RS_485 总线实现PC 机与多单片机间通信的一种方法[J].现代经济信息,2009(1):85.
