热电混合动力在水下无人航行体中的应用研究
2015-06-27傅强
傅 强
(海军驻昆明地区军事代表办事处, 昆明 650051)
热电混合动力在水下无人航行体中的应用研究
傅 强
(海军驻昆明地区军事代表办事处, 昆明 650051)
本文探讨了热电混合动力在水下无人航行体中的应用,提出了热电混合动力需要解决的关键技术,进行了热电混合动力系统技术设计并进行了相关试验,取得了预期的效果,开展热电混合动力在无人水下航行体中的应用研究对于增加航行体的航时、提高航程具有重要意义。
混合动力 水下 无人航行体
0 引言
水下无人潜航器UUV(Unmanned Undersea Vehicle)[1]是一种无人装备,包括遥控水下航行器ROV(Remotely Operated Vehicle)和自主式水下航行器AUV(Autonomous Underwater Vehicle)两类[2-4]。美国海军对军用UUV的最新定义:“UUV是自主推进的无人潜航器,其行动或完全自主(通过预编程执行任务,或通过适时控制调整任务),或仅需少量监视控制;UUV与其他平台或无系留,或仅以数据广缆系留。”[5]
UUV最早出现在20世纪60年代[3,4],长期以来主要代替潜水员进行深水勘探、沉船打捞和水下电缆铺设和维修。例如, 1966 年美国海军利用遥控水下航行器侦察并参与打捞沉入地中海 870 米深的 8 枚氢弹[6]。1974年美国用“探险者”号 UUV参与打捞了沉没在夏威夷附近海域的一艘苏联潜艇[4]。但直到 20 世纪 90 年代中期才开始用UUV解决水下侦察、通信和反潜、反水雷作战中遇到的新问题。
UUV是未来夺取水下战优势的力量倍增器[1,2,5,7,8]。为了在未来海战中取得优势,各海洋大国都在开发各种用途的军用UUV,其中美国、俄罗斯、欧洲和日本在水下航行器领域居于世界先进水平[2]。特别是美国,经过二十多年的发展,与世界上其他十几个研制UUV的国家相比,美海军处于领先地位,在各项关键技术如导航、控制、水声通信和推进各方面都取得了一批研究成果,UUV 发展已呈现出“无人化”、“模块化”和“智能化”三大趋势[3,9]。
开发高性能电池,为UUV 提供充足的电力,使其具有长续航能力,是当前研制工作中面临的最大挑战。除了研制比能高、安全性好、费效比高、对环境无影响、可重复充电使用的电池外,热电混合动力推进具有广阔的前景,它可为UUV提供数天(并有望长达数周)的作业时间。俄罗斯的Тритон-НН和КТВ,美国的MRCC以及瑞典的The SEAL均使用了柴电混合动力推进。据报道,美国国防高级研究计划局正在研制一种反潜持续跟踪无人潜航器(ACTUV),ACTUV要求3000公里的作战半径和二个月的连续部署。但是在这么小的艇体上满足大续航力所需的燃料,和解决高功率动力系统的紧凑化,在技术难度上都不小。

图1 MRCC示意图
1 热电混合动力需要解决的关键技术
无人水下航行体采用类似于柴电潜艇的热电混合动力系统,当其浮出水面处于通气管状态时,柴油发电机开始启动工作,为电池组充电,当充电完毕后,发电机停止工作,关闭相关阀件,下潜至航行深度,它具有良好的隐蔽性,随着载油量的增加,其航时可达数月,航程可达数千公里,相比单纯依靠电池作为能源的航行体,具有极大的优越性。其工作原理与柴电潜艇一样,但是由于其几何尺度和排水量较小以及航行体上无人操控的特点,其系统集成设计考虑的因素就比较多,也比较复杂,需要突破解决一系列关键技术。
1)柴油发电机以及充电器的设计
柴电潜艇上的柴油发电机组技术已经比较成熟,其功率大,体积也庞大,不适合用于小尺度小排水量的无人水下航行体上。必须根据需要研制或者选择适合的柴油发电机,并根据发电机和电池组的充电参数,研制配套的充电器。
2)电池能源的选择设计
UUV在作战中的性能和作用在很大程度上取决于续航能力。因此,能源与动力技术的研究对无人潜航器的发展至关重要。目前,UUV使用的能源包括铅酸电池、银锌电池、镍镉电池、闭式柴油机、碱性锰/锂电池、氯亚硫酰锂电池等。选择能源时,必须充分考虑机型的体积、任务使命、活动水域特点和其他方面的设计情况。综合几方面因素,小型UUV 选择能量密度较高的一次性或充电锂电池,大型UUV则可使用技术发展较成熟、成本较低的高密度燃料电池或混合动力系统[9]。
3)进排气系统的设计
潜艇上的柴油机有一套比较复杂的进、排气系统,如图2所示。但是这样一套系统用于无人水下航行体上,是不合适的,必须研制一套小型化,全自动控制进排气系统。
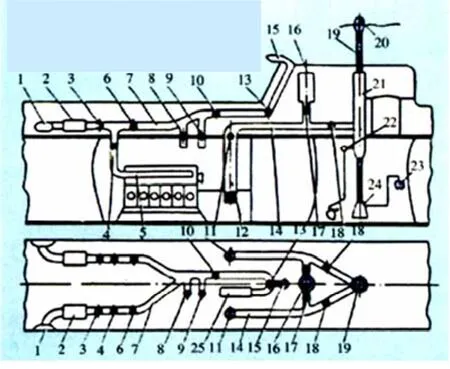
图2 常规潜艇柴油机进排气系统示意图
4)自动疏水系统的设计
潜艇上疏水系统又叫主水管系统,由泵、管路和附件组成,它是保证潜艇抗沉性的重要系统之一[11]。无人水下航行体热电混合动力系统也需要功能类似的一套自动疏水系统,当发电机耐压密封舱以及进排、气系统意外进水时,疏水系统能够自动启动,将水排除舱外,确保热电系统的安全。
5)自动均衡系统设计
当航行体在水下航行时,要使航行体保持平衡,必须满足两个基本要求:第一、重量等于浮力;第二、重心和浮心在同一铅垂线上[11]。航行体在航行过程中,随着携带燃油的不断消耗,航行体的浮力和重量在随时发生变化,对于无人水下航行体,必须时时监控这些变化并对此自动进行响应调节。为此,需要设计一套全自动的高精度均衡调节系统。
2 热电混合动力系统设计
无人水下航行体热电混合动力系统从功能结构来划分主要包括舱体和热电部分。如果是湿式水下航行体,舱体包括舱段壳体、耐压密封舱、进气系统、排气系统、电气控制系统、疏水及气源系统、舱段管理系统等。如果是干式水下航行体,则以上的一些系统均可以布置于一个耐压密封舱段内。热电部分包括柴油发电机、充电器、电池组、自动供油及补水平衡系统等。
舱段壳体主要用于支撑装有发电机的耐压密封舱、舱段管理系统、电器控制系统、疏水及气源系统、浮力筒等,并提供与航行体其它舱段连接的法兰接口,提供起吊接口。为了安装维修方便,最好采用上下开式剖分组合结构。
耐压密封舱主要为柴油发电机、充电器、各种阀门、油箱组件等提供安装和支撑空间和平台,实现水下耐压密封,同时为发电、充电电路以及进排气系统、疏水及气源系统等提供优化安装接口。
进气系统用于在通气管状态下为柴油发电机提供新鲜空气,在下潜时关闭相关阀件,防止海水进入耐压密封舱内。
排气系统用于将柴油发电机产生的废气排至水中,在下潜前关闭相关阀件,防止海水进入柴油发电机内。
电气控制系统用于对气瓶气体的分流、压力检测以及控制水泵通道阀体等的开启和关闭等。
疏水及气源系统包括疏水和供气两部分。当耐压密封舱内由于意外进水进入集水舱达到一定高度,当液位计检测到进水时,自动启动水泵将水抽出集水舱外。气源部分实现对各种阀门等气动元件的供气和配气。

图3 冷却水与冷却液温升曲线图
舱段管理系统与上位机通信,执行上位机进排气通道启闭、热机启停、充电等有关指令,监测舱内进水并自动排水,实现舱段补水平衡等。
柴油发电机包括热机发电机、冷却、控制等部分。热机发电机将生物化学能转换成电能;循环冷却系统对密封舱内发电机进行循环冷却,使热机温升控制在允许范围之内;控制系统接受舱段管理器的指令进行启动、停机、输出功率调节等。充电器用于为电池组充电并进行充电管理。自动供油及补水平衡系统实现为柴油机不间断供油以及由于油料的消耗,自动补水以实现全艇的平衡。
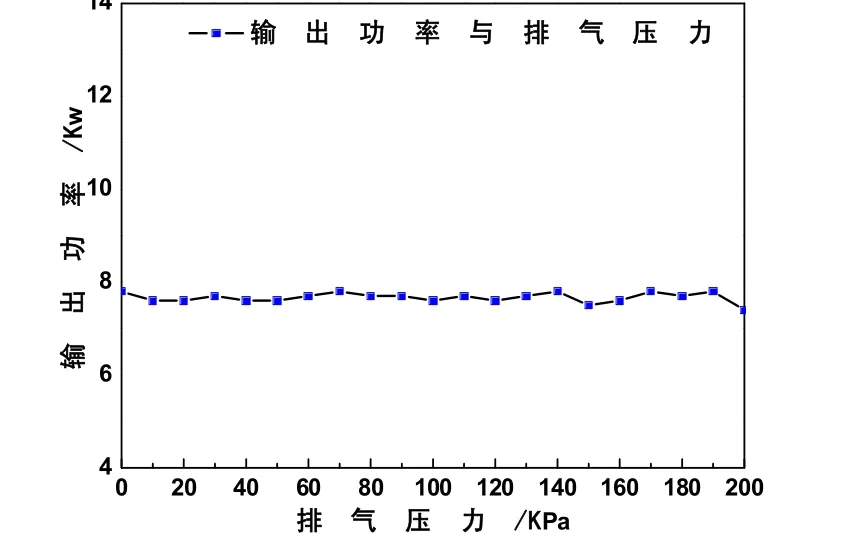
图4 排气压力与输出功率的关系曲线
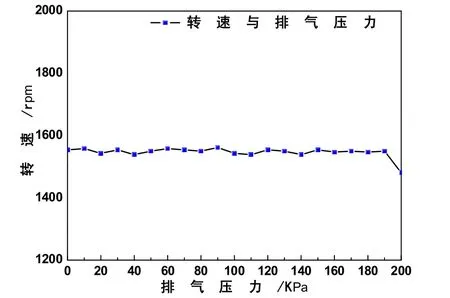
图5 排气压力与转速的关系曲线
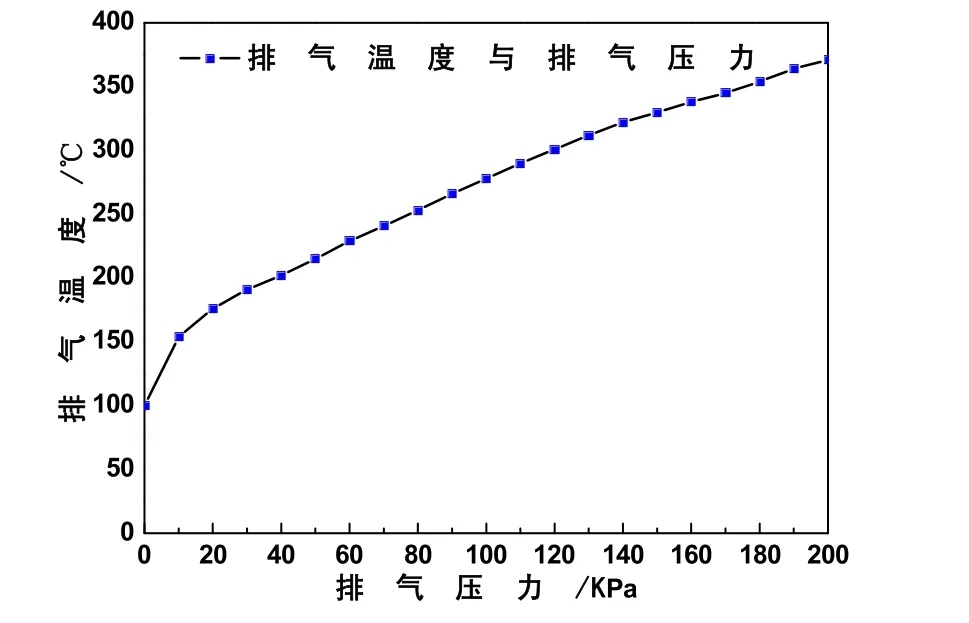
图6 排气压力与排气温度的关系曲线
3 热电混合动力系统试验
根据热电混合动力系统设计,进行了相关试验,验证了系统及组部件的功能和系统协调性。
1)水冷系统试验
试验中对发电机进出口冷却水和冷却液温度进行采集,关系曲线如图3所示。
2)系统工况随排气背压变化试验
进行了系统工况随排气背压变化试验,得到了输出功率、转速、排气温度与排气背压的关系,关系曲线如图4、5、6所示。
3)控制系统及充电机环境箱内温度试验
在试验中提取了控制系统及充电机环境温度数据,关系曲线如7、8所示。
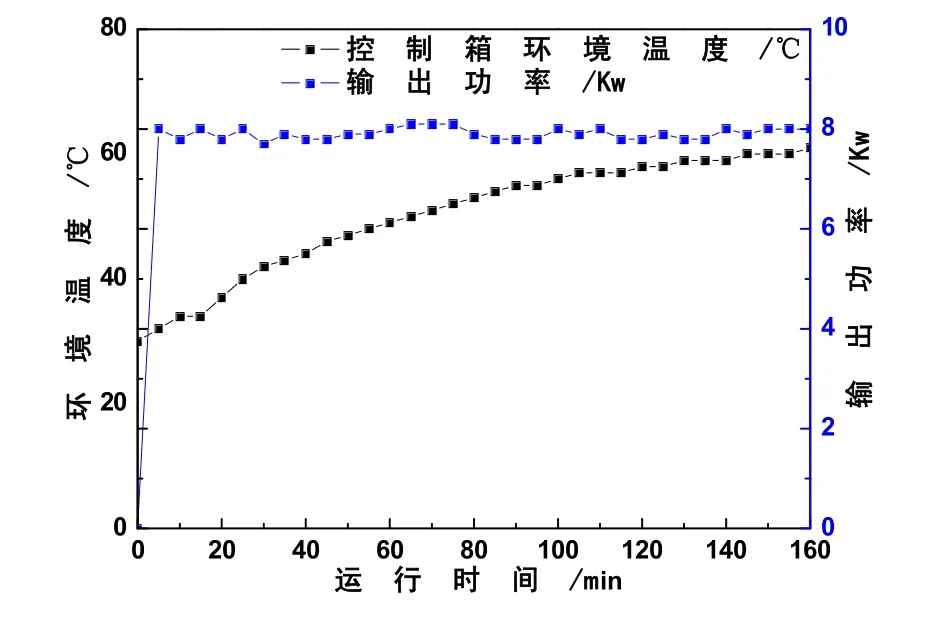
图7 控制箱环境温度与运行时间关系曲线
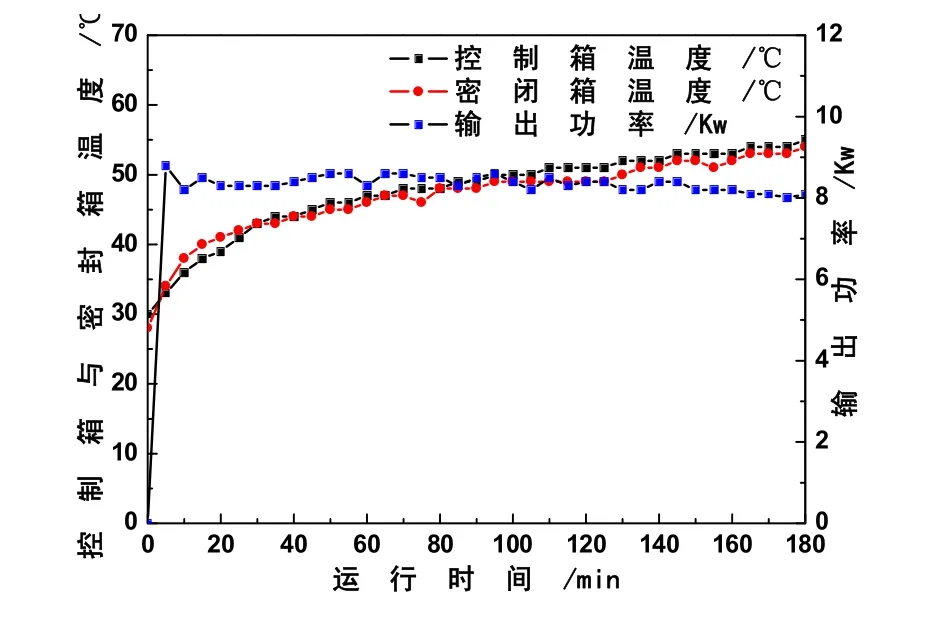
图8 控制箱与密闭箱环境温度与运行时间关系曲线
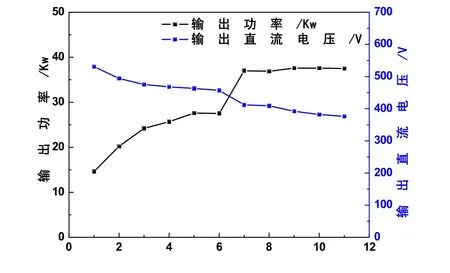
图9 1800 rpm时输出功率与输出电压关系曲线
4)发电试验
试验中进行了发电试验,关系曲线如图9、10所示。
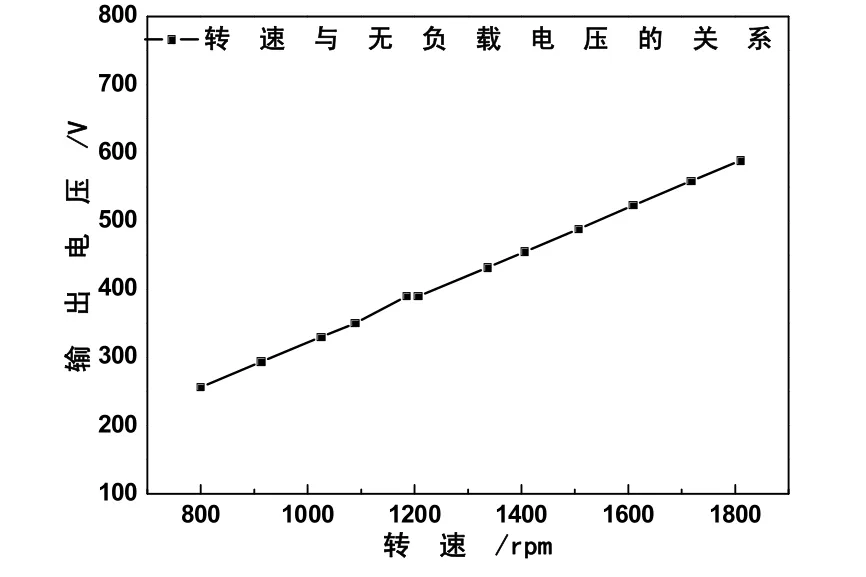
图10 转速与无负载关系曲线
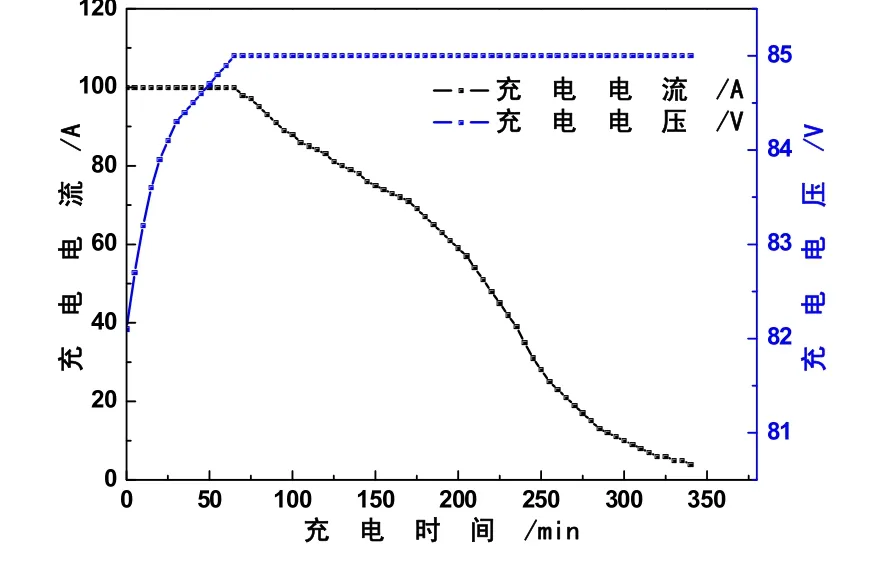
图11 充电电压电流关系曲线
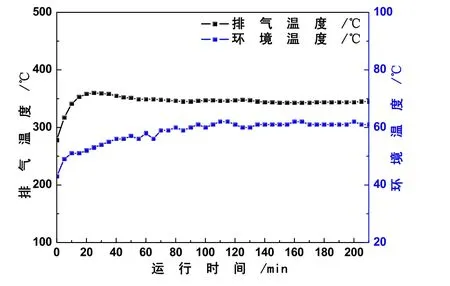
图12 在排气压力为150 kPa时排气温度与环境温度曲线
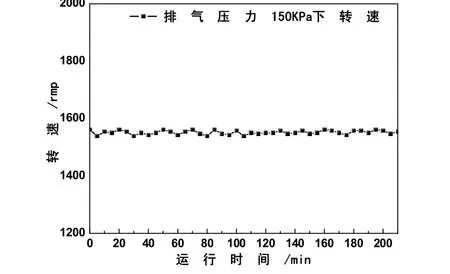
图13 在排气压力为150 kPa时转速曲线
5)充电控制试验
试验中进行了充电控制试验,曲线如图11所示。
6)在给定排气背压下输出工况变化试验
实验中进行了在给定排气背压150 kPa下输出工况变化试验,曲线如图12、13、14 所示。
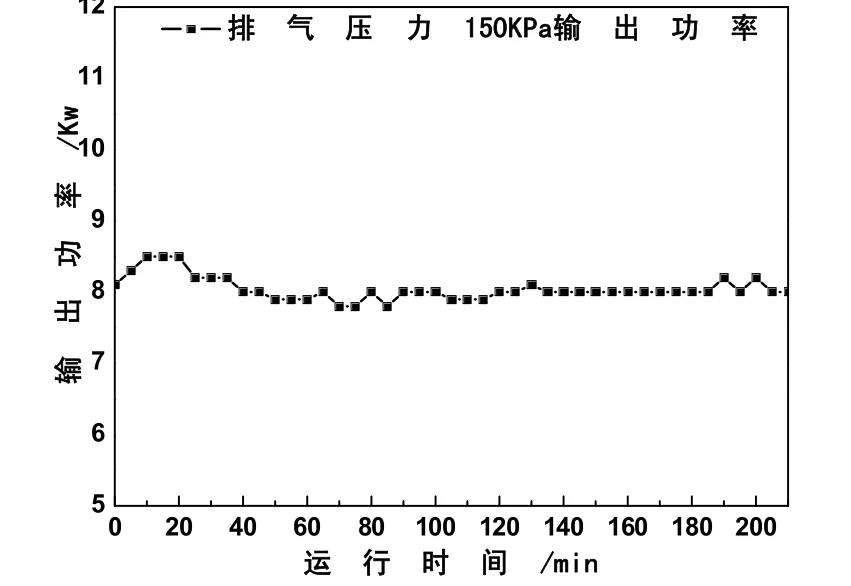
图14 在排气压力为150 kPa时输出功率曲线
4 结束语
热电混合动力系统经过设计和相关试验,取得了预期的效果,但还需要针对一些关键技术进行进一步研究。热电混合动力可以大大增加无人水下航行体的航时,提高航程,开展热电混合动力在无人水下航行体中的应用研究具有重要意义。
[1] The Navy Unmanned Undersea Vehicle (UUV) Master Plan. November 9, 2004 Approved for Public Release. Distribution Unlimited.
[2] 王蓬. 军用UUV的发展与应用前景展望. 鱼雷技术, 2009, (2).
[3] 许韦韦, 孟昭香. 新兴的水下作战平台UUV. 指挥控制与仿真, 2006, 6.
[4] 袁思鸣, 陈强. 美国海军水下无人航行器发展综述.中外船舶科技, 2006,(4).
[5] 美国海军无人潜航器主计划分析报告. 海军装备研究院科技信息研究所, 2005.
[6] 兰志林. 周家波. 无人水下航行器发展. 国防科技, 2008, (2).
[7] 郭凤水等. 军用UUV使命任务和装备性能分析. 中国舰船研究, 2007, (10).
[8] 徐玉如等. 海洋空间智能无人运载器技术发展展望,中国舰船研究, 2006, (6).
[9] 孙碧娇等. 美海军无人潜航器关键技术综述. 鱼雷技术, 2006.
[10] CB/Z204-82 潜艇柴油机动力装置进、排气系统设计方法.
[11] 张希贤. 唐荣庆编. 潜艇装置及系统. 上海: 上海交通大学出版社, 1996年2月第1版.
Application of A Thermoelectric Hybrid Technology to Unmanned undersea Vehicles
Fu Qiang
(Naval Representatives Office in Kunming, Kunming 650051, China)
This paper discusses the application of a thermoelectric hybrid technology in unmanned undersea vehicles, and devises the key technologies needed to solve in this area. It also designed a thermoelectric hybrid technology system and tested the related experiments, which achieved the anticipated results. It's important to investigate the application of thermoelectric hybrid technology in unmatched vehicle under water, because the technology will enhance the sailing time and distance.
hybrid electric vehicle; undersea; unmanned vehicle
TP242
A
1003-4862(2015)04-0067-05
2014-05-12
傅强 (1965-),男。研究方向:鱼雷。
