图像探针测量汽轮机湿蒸汽二次水滴参数方法研究
2015-06-24蔡小舒黎石竹
高 伟, 周 骛, 蔡小舒, 黎石竹, 刘 浩
(上海理工大学能源与动力工程学院,上海 200093)
图像探针测量汽轮机湿蒸汽二次水滴参数方法研究
高 伟, 周 骛, 蔡小舒, 黎石竹, 刘 浩
(上海理工大学能源与动力工程学院,上海 200093)
汽轮机中二次水滴粒径大,容易造成叶片水蚀,降低汽轮机效率.但由于其数量少,测量困难,加大了研究的难度.在众多测量方法中,图像法具有同时测量二次水滴粒径、速度、方向和湿度等参数的优点.采用图像探针测量二次水滴,利用镜头参数确定测量区,提出根据水滴图像的模糊程度来确定该水滴是否处于测量区内,处理测量区内二次水滴,得到其粒度、速度和湿度等参数.通过实验室研究,得出模糊程度和颗粒的关系,并经过湿蒸汽模拟实验,计算出喷雾水滴的粒度和体积浓度,验证了该处理方法的有效性,为二次水滴的测量提供了一种新的思路.
汽轮机;图像法;二次水滴;湿蒸汽
汽轮机中过热蒸汽推动叶片膨胀做功,温度、压力不断降低,逐渐转变为湿蒸汽.湿蒸汽流经叶片时一部分会沉积在叶片表面形成水膜,受叶片离心力和高速气流的作用被撕裂和破碎,形成二次水滴.二次水滴直径较大,是低压缸动叶片水蚀破坏的主要原因,影响汽轮机运行的效率和安全性[1-2].
二次水滴多集中在叶顶及叶根部分,粒径分布很宽,速度相对较低[2].但是,由于其大小、多少以及出现的位置具有随机性,给测量和数据分析都带来了很大困难,因此,有关二次水滴测量的研究非常有限[3].近年来,国外对二次水滴的研究都侧重于二次水滴的运动稳定性[4]、水滴冲击影响以及二次水滴生成原理[5]等方面.作者所在研究所前期利用光脉动等方法对汽轮机内二次水滴进行测量,发现存在大于400μm的二次水滴,在汽轮机内图像拍摄中也发现疑似二次水滴图像[6],其粒径远大于400μm.这和理论研究中认为二次水滴的尺寸小于400μm[7]相矛盾,因此有必要通过合理的方法对二次水滴进行测量,得到正确的尺寸.
二次水滴的测量内容包含其粒度、速度、体积浓度和湿度.湿度的计算需要确定被测二次水滴是否处于测量区内,并且为了获得二次水滴的粒径等参数,需要通过水滴影像模糊程度的分析,确定水滴的离焦位置,选取合适的离焦范围.因此,图像法探针的测量区可定义为可以获得准确二次水滴参数的焦平面前后一定距离范围(景深)内的区域.该区域可确定为测量视场的空间体积,进而可以计算出二次水滴的数量、体积浓度和湿度.为此,如何界定颗粒的模糊程度和选取合适的离焦范围成为本文的研究重点.本文针对该问题,提出了实验模糊标定,通过梯度面积和灰度均值的计算来界定颗粒的离焦距离,进而计算颗粒的粒度、速度、体积浓度等参数,并进行喷雾水滴测量实验以验证方法的可行性.
1 测量系统
二次水滴图像法测量探针系统由CCD(charge coupled device)相机、远心镜头、高亮LED(lighting emitting diode)背景光源和电脑等组成.图1为测量系统示意图.
二次水滴是由附着在动叶片表面的水膜受到汽流剪切和离心力共同作用,破裂甩出产生,运动速度大,可能超过200 m/s[8].为了测得高速运动的二次
水滴,图像探针选用的CCD相机是AMAZON2 SERIESIMC-720G,它的全局快门最短曝光时间为1μs,像素大小为4.4μm,传感器面积为1/1.8″,有效像素为2百万.
选择镜头时考虑到二次水滴数量很少,如果镜头放大倍率太大,视野太小会极大降低捕捉到的概率;而倍率太小,视野太大会导致图像像素尺寸过大,小尺寸的二次水滴无法拍到,并且图像处理精度也会下降.综合这些因素,选择放大倍率为0.45的远心镜头,其工作距离为85 mm,景深为4.4 mm,分辨率为18.3μm,配合CCD相机后的图像像素大小为9.8μm.
为满足高速曝光下的光强要求,照明光源使用了功率3 W的高亮白光二极管,并配合透镜将其形成近似平行光,作为逆光照明光源.

图1 图像法测量系统Fig.1 Measurement system
2 模糊图像处理思路
二次水滴的运动为三维立体运动,并受到主汽流和离心力的影响,运动情况复杂,为了建立完善的运动模型,图像处理中需要作以下假设:
a.假设二次水滴在流经测量区间时是匀速直线运动;
b.由于本算法是基于单相机单帧单曝光图像法,对于垂直于图像的运动方向无法进行计算处理,所以计算结果为平面投影速度,即垂直于图像方向的运动速度为0.
在以上假设条件下,由于汽轮机中二次水滴的运动速度快,在最短曝光时间1μs下,捕捉到的二次水滴并非“冻结”状态,而是有一定长度的轨迹图像.轨迹图像包含了水滴和相机的相对位移信息,即模糊长度和模糊宽度.颗粒运动图像参数如图2所示.已知相机的曝光时间为t,通过图像得到颗粒的位移阴影区域长度L以及水滴的直径D,则水滴速度为


图2 颗粒运动图像包含的参数Fig.2 Parameters in the image of particle motion
2.1 图像处理思路
二次水滴的运动图像中,由于背景、水滴模糊和水滴大小等原因,在图像处理时需要解决以下问题:
a.非均匀背景的影响.由于汽轮机中流场不均匀,存在一次水滴和二次水滴,图像的背景是明暗不均匀的[5].
b.水滴离焦程度和测量区的确定.二次水滴在测量空间的位置是随机的,为了测量二次水滴的湿度,需要确定测量空间,并且确定二次水滴是否在测量空间内.
c.大水滴(20像素及以上)、小水滴(20像素以下)的处理方式.小水滴图像像素较少,小水滴影像的模糊程度受离焦的影响大于大水滴[9],需要对大水滴和小水滴分别用不同的方法进行计算.
针对上述问题,水滴模糊图像处理方法如下:
a.先在实验室对已知粒径和离焦距离的颗粒进行标定拍摄,获得离焦距离、颗粒粒径分别与灰度值和梯度幅值的关系,找到合适的表征参数并建立表征参数数据库;
b.对实际拍摄得到的水滴图像,获得水滴的灰度值和梯度幅值参数后,通过代入标定数据中插值反演算出水滴的大概离焦距离和粒径大小;
c.通过离焦距离筛选出处于测量区间内的离焦水滴;
d.将符合设置测量区间内的离焦水滴进行大小水滴分类,并作均匀背景处理;
e.最后将背景均匀的大小水滴分别用不同方法处理得到水滴参数.
2.2 大水滴处理方法
在一定景深范围内的大水滴拥有很好的边缘信息,可以通过边缘算子提取它的边界,进而得出水滴的粒径、速度等信息.边缘算子有很多,如Sobel算子、Canny算子、Prewitt算子和其它改进算法[10]等,本文经对比后选择了Canny算子作为大水滴处理的边缘算子.
Canny算子的基本原理是首先通过高斯卷积对图像进行高斯平滑,然后对平滑后的图像进行微分操作,得到梯度图,再采用“非最大抑制算法”寻找图像中的可能边缘点,最后通过双门限值递归寻找图像边缘点,得到单像素宽度边缘图.Canny算子对图像的要求很高,在采用Canny算子前需要很好的图像预处理.
2.3 小水滴处理方法
由于小水滴包含的像素少,通过梯度或者边缘检测的方法会带来较大误差,本文选用Otsu算法,在一定离焦范围内,在背景干扰去除和大水滴分离的情况下,能有效地提取出小水滴信息.
Otsu算法是一种使类间方差最大的能自动确定阈值的方法,其基本思想是把图像像素分为背景和目标两类,通过搜索计算类间方差最大值得到最优阈值[11].
3 模糊图像标定
根据模糊图像处理思路,需要进行大量的实验室模糊标定,进而找到合适的表征参数并建立表征参数数据库.
3.1 模糊标定系统和方法
实验室模糊标定系统由拍摄系统、标定板、光源和电脑组成.系统通过对具有多个不同大小标准圆颗粒的标定板在不同离焦位置上进行拍摄测量,得到不同大小标准圆颗粒在不同离焦位置的图像.标定时将拍摄系统和光源固定,调整标定板和系统的相对位置,获得相应的图像,标定中改变标定板到镜头的距离可获得不同模糊程度的图像.
实际二次水滴的尺寸在几十微米到几百微米之间,受标定板的限制,本文只对25~400μm共19种不同粒径的颗粒进行标定测量,离焦区间为-3~3 mm,离焦距离为0.3 mm.图3(见下页)为不同离焦位置的标定图像.
3.2 有效梯度、梯度面积和灰度均值
对大量标定数据研究后,利用灰度值和梯度幅值衍生出梯度面积和灰度均值,用这两个参数来表征图像的模糊程度.
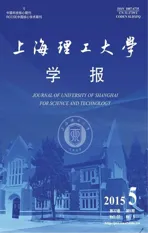
在颗粒图像中,不仅颗粒图像边界存在梯度变化,图像背景的明暗变化和噪音也会产生一定的梯度变化,如不消除,会给测量带来误差.因此,需要定义颗粒图像的有效梯度,用来区别背景梯度和颗粒梯度.图4(见下页)是不同背景颗粒图像及相应的梯度幅值分布图.

图3 不同离焦距离的标定板图像Fig.3 Calibration board images with different defocussing distance
对不同背景图像的研究比较发现,被测目标仅占整个图像的小部分,图像中梯度幅值在4以下的占到了整体的90%以上.假设梯度幅值4为阈值,梯度幅值小于4的都作为背景和噪音梯度略去,大于4的保留下来作为颗粒有效梯度.图5(a)为图4(c)略去梯度值小于4后的图,可以看出用4作为梯度幅值的阈值能很好地区分背景梯度和颗粒梯度,因此,有效梯度阈值确定为4.
颗粒的梯度面积则是颗粒影像从梯度开始变化的边界到颗粒中心的整体面积(图5(b)).颗粒的梯度面积所包含的所有像素在原始图的平均灰度值就是该颗粒在该离焦距离下的灰度均值.
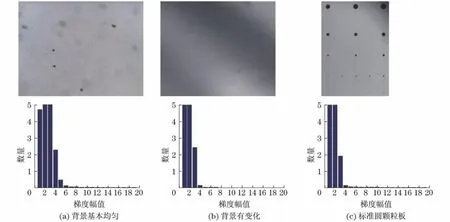
图4 不同背景的颗粒图像实验图像及相应的梯度幅值图Fig.4 Particle images with different background illumination and their gradient value distributions

图5 标定板梯度和梯度面积图像Fig.5 Gradient image and gradient area image of the calibration board
3.3 模糊标定曲线关系
通过模糊标定图像获得不同标准圆颗粒在不同离焦距离下的灰度均值和梯度面积后,可以得到灰度均值、梯度面积与颗粒粒径及离焦距离的关系.图6为灰度均值、颗粒粒径和离焦距离的关系图,图7为梯度面积、颗粒粒径和离焦距离的关系图.
由图6和图7可以看出,灰度均值和梯度面积是关于焦平面对称的,说明颗粒的前离焦和后离焦模糊程度变化是相当的.其中灰度均值随着离焦距离增大逐渐减小,随着颗粒尺寸增大而逐渐增大;梯度面积随着离焦距离增大逐渐增大,随着颗粒尺寸增大而逐渐增大.
由模糊标定实验可以看出,灰度均值和梯度面积能很好地表征图像的模糊程度.同时,在获得标定数据后,可以分别得到灰度均值、梯度面积与颗粒大小的关系,以及灰度均值及梯度面积与离焦距离的关系,并建立数据库.因此,在实际测量中,获得水滴图像的灰度均值和梯度面积后,将这两个参数插值代入标定数据库中,分别得到水滴的大小和离焦距离.通过对离焦距离的选择,可以确定水滴是否处于测量区,从而得到水滴在测量区内的数量和体积浓度.
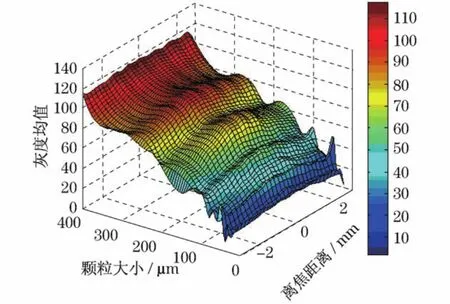
图6 颗粒大小、离焦距离和灰度均值关系图Fig.6 Diagram for relationships among particle size,defocussing distance and mean value of gray level

图7 颗粒大小、离焦距离和梯度面积关系图Fig.7 Diagram for relationships among particle size, defocussing distance and gradient area
4 湿蒸汽模拟实验、处理过程和结果
4.1 模拟实验思路和设备
为了验证本文模糊图像算法,本实验选用水滴喷雾器来模拟二次水滴,其喷出的水滴粒径在130μm左右;超声雾化器用来模拟一次水滴背景,其产生的水雾粒径为2~5μm.
湿蒸汽模拟实验由测量探针、水滴喷雾器、超声雾化器、电脑等组成.由于超声雾化器和喷雾器产生的水滴速度不可能达到汽轮机中湿蒸汽流速,因此,选择降低背景光强、增加曝光时间的方法来模拟运动效果.实验时曝光时间为100μs,在该曝光时间下,喷雾水滴在图像中形成的轨迹能较好地模拟二次水滴轨迹.图8为湿蒸汽模拟系统示意图,图9为实验中拍摄的图像.

图8 湿蒸汽模拟系统示意图Fig.8 Illustration of the wet steam simulation system

图9 湿蒸汽模拟实验图像Fig.9 Image from the wet steam simulation experiments
在实验中部分颗粒因为运动速度较快,在图像中形成了轨迹,而运动速度相对较慢的水滴被“冻结”.在图像处理中先对颗粒轨迹进行判断,轨迹长度小于1.5倍轨迹宽度的水滴定义为“冻结”水滴,其大小用等效圆直径表示.
4.2 图像处理过程
针对上文水滴模糊图像处理方法的基本思路,选取图9所示模拟实验图像,介绍水滴模糊图像的处理过程.经过去噪处理和梯度处理,得到图像的梯度图,如图10所示.将该图的水滴梯度图像填充得到各个水滴的梯度面积,并计算图9中相应水滴影像的灰度均值.将得到的各水滴的梯度面积和灰度均值代入标定数据库插值反演计算后得到水滴的初步预估粒径大小和离焦距离.

图10 梯度图像Fig.10 Gradient image
由于测量系统所采用的远心镜头的景深范围是±2.2 mm,为了测量更加准确,本文将远心镜头的景深范围±2.2 mm作为图像探针的测量区.凡是经图像处理得到的水滴离焦距离大于2.2 mm的均示为不在测量区域中,不作处理.图11为离焦距离在±2.2 mm内的水滴图像.
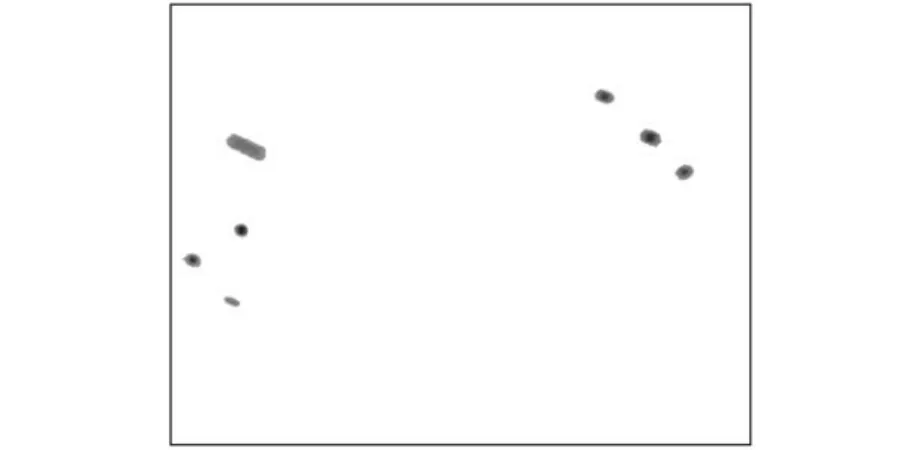
图11 离焦距离在±2.2 mm内的水滴图Fig.11 Droplets image with defocussing distancewithin±2.2 mm
选出符合景深范围内的所有水滴后,对大小颗粒须采用不同处理方法.这里将粒度50μm(水滴约占20个像素)作为阈值,凡是初步预估粒径超过50μm的水滴均作为大颗粒处理,小于50μm的水滴作为小颗粒处理.由于本文图像拍摄系统中图像像素为9.8μm,小于20μm(水滴约占4~5个像素)的水滴像素太低,得到的测量误差会比较大.因此,小于20μm的水滴不作处理,在进行大小水滴分类时予以删除.图12为对落在焦距距离±2.2 mm内的水滴进行大小分类后获得的图像.

图12 分离后的离焦距离在±2.2 mm内的水滴图Fig.12 Droplets image with seperated defocussing distance within±2.2 mm
由于分离出来的水滴背景为白色,不适合直接用算子处理,因此需要对水滴填充合适的背景,将分离出的大水滴和小水滴图像按照水滴边界灰度的均值重新填充背景,再用中值滤波减少边缘的影响,得到图13.
将大水滴部分和小水滴部分分别用Canny算子和Otsu算法,求得水滴的运动参数.图14为最终二值化后的图像.

图13 填充背景后的图像Fig.13 Images after background filling
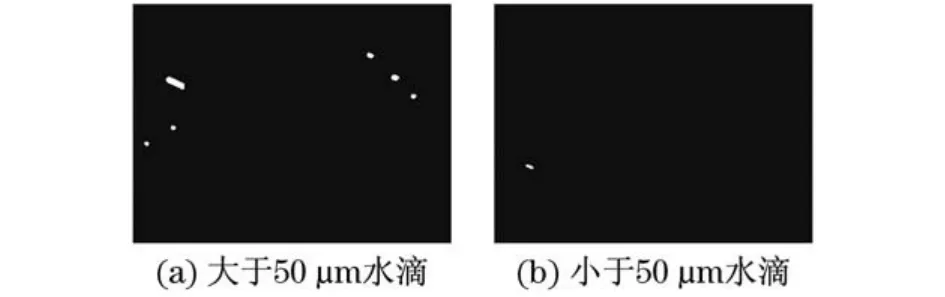
图14 二值化后的图像Fig.14 Images after binarization
4.3 实验结果和分析
通过对模拟拍摄的所有图像进行处理后,得到了所有在指定离焦范围内(离焦距离±2.2mm内)的水滴粒径和速度.图15和图16为喷雾水滴测量验证实验的实验结果.实验共采集了220张水滴图像,其中图15为实验测得的水滴粒径分布图,图16为实验测得的水滴速度分布图.

图15 实验测得的水滴粒径分布图Fig.15 Particle size distribution measured in the wet steam simulation experiment
由图15和图16可知,实验中测得在设定景深范围(±2.2 mm)(测量区)内的水滴数据626个,其中轨迹水滴218个,体积分数为1.4×10-8.水滴粒径分布在20~260μm之间,其中在20~60μm和100~160μm之间数量居多.水滴的速度主要分布在0.5~5 m/s之间,其中0.5~3 m/s的居多,个别水滴速度达到6 m/s以上.实验可以看出本文图像算法可以区别模糊水滴的离焦程度,并且可以对大小不同的水滴进行分类处理.

图16 实验测得的水滴速度分布图Fig.16 Particle velocity distribution measured in the wet steam simulation experiment
在实验数据处理中,偶尔会发现有水滴重叠的现象,这种情况会导致水滴梯度面积和灰度均值的计算出现错误,从而两个水滴都被离焦筛选时剔除,导致测量结果错误.但是,由于实际汽轮机中的二次水滴浓度很低,几乎不可能出现水滴重合的情况,因此,在实际汽轮机二次水滴的图像处理中,不用考虑水滴重合带来的误差.
5 结 论
采用图像法测量可以直观得到汽轮机湿蒸汽中二次水滴的粒径和数量等参数,但需要确定那些水滴是否处于图像探针的测量区中,因此本文提出根据水滴影像的模糊程度来判断水滴是否处于测量区内的思路.通过本文研究可以得到以下结论:
a.通过实验室标准圆盘颗粒的离焦模糊标定表明,颗粒的灰度均值和梯度面积两个参数能很好地表征颗粒的模糊程度,并且变化规律明显.本文由于时间的原因只作了二维圆盘标定,如果改用空间布置的三维颗粒作标定,标定结果会更加准确.
b.通过湿蒸汽模拟实验表明了本文提出的图像算法具有可行性.根据颗粒影像的模糊程度可以反演确定水滴的离焦位置,进而可以确定水滴是否处于测量区内,筛选出处于测量区内的水滴影像;并且对于大于50μm的水滴和小于50μm的水滴影像须分别采用Canny算子和Otsu算法处理,得到其尺寸.该模糊图像处理方法为二次水滴的测量提供了新的思路.
[1] 王乃宁.颗粒粒径的光学测量技术及应用[M].北京:原子能出版社,1999.
[2] 王娜,张弘,蔡小舒.二次水滴可视化探针的设计[J].热力透平,2006,35(2):79-82.
[3] 王丽莉,蔡小舒.汽轮机湿蒸汽两相流中水滴尺寸研究进展[J].上海理工大学学报,2003,25(4): 307-312.
[4] Aleksandar M,Vukoman J.Stability of the secondary droplet-film structure in polydispersed systems[J]. Journal of Colloid and Interface Science,1995,170: 229-240.
[5] Samenfink W,Elsaûer A,Dullenkopf K,et al.Droplet interaction with shear-driven liquid films:analysis of deposition and secondary droplet characteristics[J]. International Journal of Heat and Fluid Flow,1999, 20:462-469.
[6] BartošO,Cai X S.Measurement of coarse droplets in steam turbines[C]∥7th International Symposiumon Multiphase Flow,Heat Mass Transfer and Energy Conversion.Xi’an,2012.
[7] Moore K J,Sieverding C H.Two-phase steam flow in turbines and separators[M].New York:Mc Graw Hill, 1976.
[8] Kleitz A,Laali A A,Courant J J.Water droplet sizing in LP and HP wet steam turbines[C]∥Fluid Machinery Forum.New York:ASME,1991.
[9] Blaisot J B,Yon J.Droplet size and morphology characterization for dense sprays by image processing: application to the Diesel spray[J].Experiments in Fluids,2005,39:977-994.
[10] 曹春萍,梁慧.图像边缘检测中的改进算法[J].上海理工大学学报,2013,35(2):157-160.
[11] Otsu N.A threshold selection method from gray-level histogram[J].IEEE Transactions on System Man Cybernetics,1979,9(1):62-66.
(编辑:丁红艺)
Particle Parameters Measurement for Coarse Water in Steam Turbine by Image Probe
GAOWei, ZHOUWu, CAIXiaoshu, LIShizhu, LIUHao
(School of Energy and Power Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
The size of the coarse water in steam turbine is large but the number is small.And coarse water is the main factor which causes blade water erosion in steam turbine and also leads to loss in turbine stage efficiency.Among the methods of measuring coarse water,image method has the advantage of simultaneous measurement of the parameters of particle size,speed,direction and humidity.So,in the study the image probe was adopted to measure coarse water.The measurement volume was determined by the parameters of lens,moreover a new image method was proposed to find whether coarse water is in the measure area or not according to the blur degree and the calculated particle size,speed and humidity of coarse water in the measurement volume.And then the relationships between the blur degree of particle image and the particle parameters were obtained by experimental study.A wet steam simulation experiment was carried out to calculate the spray droplet size and volume concentration which verifies the effectiveness of the measurement. The study provides a new idea for coarse water measurement.
steam turbine;image method;coarse water;wet steam
TK 313
A
1007-6735(2015)05-0433-07
10.13255/j.cnki.jusst.2015.05.004
2014-09-17
上海市自然科学基金资助项目(12ZR1446900);上海市教委科研创新项目(12YZ110)
高 伟(1989-),男,硕士研究生.研究方向:汽轮机内二次水滴测量.E-mail:gaowei_jj@163.com
蔡小舒(1955-),男,教授.研究方向:颗粒测量技术.E-mail:usst_caixs@163.com