基于状态观测器的多艘船舶鲁棒同步控制
2015-06-24丁福光马燕芹王元慧李江军
丁福光,马燕芹,2,王元慧,李江军
(1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.中国科学院声学研究所北海研究站,山东青岛266023)
基于状态观测器的多艘船舶鲁棒同步控制
丁福光1,马燕芹1,2,王元慧1,李江军1
(1.哈尔滨工程大学自动化学院,黑龙江哈尔滨150001;2.中国科学院声学研究所北海研究站,山东青岛266023)
为了实现多艘船舶的同步运动,满足海上作业的需求,提出了基于状态观测器的多艘船舶鲁棒同步运动控制策略。建立了多艘船舶运动数学模型;建立了扰动观测器对未知扰动进行估计;在此基础上,为每艘船预先设定期望路径,并用有向图表示船舶之间的通信,将多艘船的同步运动误差引入到反馈控制器,控制多艘船舶实现同步运动;在多艘船的速度和加速度不可测的情况下,通过分别对每一艘船舶设计非线性状态观测器,进而得到多艘船的速度和加速度估计值;利用李雅普诺夫稳定性理论,证明了所设计的控制律的稳定性;通过仿真得出该同步控制方法可以很好地解决多艘船舶的同步运动控制问题。
船舶运动控制;同步控制;扰动观测器;非线性状态观测器;鲁棒控制
随着陆地资源的匮乏,人们渐渐地把更多目光投向资源丰富的海洋。然而,由于海洋环境的复杂多变,海上作业的安全性引起人们的极大关注。船舶同步运动控制技术保障海上特种作业安全和顺利进行的一项关键技术,在船舶执行航行补给任务时,需要船舶之间保持固定距离,来保证补给过程的安全进行;同时进行海上搜救的救助船与受援船之间同样需要控制救助船来保持与受援船的相对距离以实现顺利救助;机动式海上基地(MOB)之间的相对位置的控制避免基地之间碰撞等都涉及到船舶之间的同步运动控制问题,为了保证任务的顺利完成,这就需要高效的同步运动控制策略保持船舶的同步运动。
同步可以认为是在多个系统之间的时间的一致性[1]。随着同步在控制领域达到广泛应用[2],多艘船舶同步运动的控制方法也逐渐成熟。如采用虚拟控制方法的船舶同步运动控制[3],Kyrkjebø E在船舶补给操作过程中将多个非线性观测器引入到反馈同步控制器中[4]。Angeles A R设计了协调同步控制策略[5]。Fossen T I提出基于输出反馈的观测器-控制器同步控制策略[6]。Kyrkjebø E把跟踪参考点问题视为同步的概念,采用了反馈控制实现了同步运动[7]。王仲采用了基于神经网络的PID控制使动力定位船舶与自由漂浮船舶达到同步[8]。王丹丹采用了基于模糊自适应的PID控制方法使得救助船达到与受援船的同步实现安全救助[9]。针对控制船舶之间的同步,不仅仅涉及到同步运动控制方法的设计,还要考虑到外界环境的扰动情况[10⁃11]。
针对多艘船舶同步运动控制的研究,本文采用了扰动观测器对未知外界扰动进行估计,并且将船舶之间通信拓扑用有向图表示,这不但降低了对船舶之间通信质量的要求,而且可以得到船舶之间的同步误差。另外,在船舶速度和加速度不可测的情况下,采用非线性状态观测器对未知状态进行估计。
1 图论和船舶模型
1.1 数学图论
如果对于所有(vi,vj)∈E(G)成立,并且满足(vj,vi)∈E(G)成立,那么图G称为无向图,否则,称图G为有向图。
1.2 船舶运动数学模型
水平面船舶在船体坐标下的动力学方程:

船体坐标系和北东坐标系的转换为

式中:R(ψ)为2坐标系下的旋转矩阵。
船舶在北东坐标系下运动模型为

其中,

假设 存在正定函数fk,使得扰动f满足‖f‖<fk,并且扰动的变化率满足‖·f ‖≤Δ,Δ是正的常值。
2 鲁棒同步运动控制器设计
针对环境扰动未知的情况下,利用扰动观测器对未知量进行估计,并且结合船舶之间的通信拓扑引入同步误差,设计同步控制律来控制船舶达到同步运动。
2.1 扰动观测器设计
设计观测器的形式如下:


式中:f^为未知环境扰动f的估计值,b是临时变量,K是要设计的正定对角矩阵.
定义船舶的扰动观测器误差为

式(6)对时间求导可以得到·

定理1 对于未知的海洋扰动,通过调整K和β,扰动观测器(5)可以使得观测器估计误差指数收敛于任一小的值。
证明:取候选李雅普诺夫函数为

式(8)对时间的导数为

式中:λmin(K)表示K的最小特征值,并且β是正的常数。通过调整K和β可以保证:

由此,扰动观测器的误差指数收敛于半径为Robs=的圆。
2.2 鲁棒同步运动控制器设计
假设多船的船舶运动数学模型参数和所有的状态信息已知时,采用状态反馈设置控制律τi为

式中:Kpi,Kdi∈Rn×n是正定的,参考位置ηri为

位置同步误差si∈Rn×n定义为

式中:ηdi为期望的信号,为循迹误差,dij是预设路径的相对距离。
定理2 若船舶运动数学模型(3)在扰动观测器(5)和同步控制器(11)的控制下,且满足条件(18)。则,同步误差和观测器估计误差均一致稳定有界。
将式(11)代入式(3),并结合式(6),可以得出:

式(14)为船舶的同步误差表达式,下文将对所设计控制器的稳定性进行分析。
证明:定义误差s=[s1,s2,…,sn],则李雅普诺夫函数选为

其中,Ke=diag(k1,k2,…,kn),Ka=diag(ka1,ka2,…,kan)分别为正定对角矩阵,并且取
李雅普诺夫函数对时间的导数为
通过调整Ka、Ke、Kd、Kp、ε1、ε2,可以保证:

定义变量μ为

取Λ=diag(Δi),同时定义δ=F~TΛ。
则不等式(16)可以写成:

由等式(19)可知,闭环系统的所有误差是全局一致有界的,即
由是(13)可知,ηi,ηdi的关系可以通过转换矩阵T获得:

式中:ηd==

矩阵,并且dij=di-dj。
结合图论的知识以及矩阵论知识可知,T为非奇异矩阵,则能得到,由可知lt
3 同步运动控制器设计
在建立好扰动观测器的基础上假设船舶的速度和加速度信息不可测,可以通过非线性状态观测器对速度和加速度进行估计。由此,设计基于状态观测器的鲁棒同步运动控制器为




通过下式引入坐标转换:

将控制器(21)以及扰动观测器(5)和状态观测器(23)作用到系统(3),系统的同步运动误差为
其中,阻尼矩阵Di在本文中为定常线性矩阵。
定理3 船舶运动数学模型(3)通过观测器(23)估计未知状态下,采用同步运动控制器(21),系统的同步误差趋于全局一致有界。
证明:选定李雅普诺夫函数:

式中:Γ1、Γ2、Γ3为正定的对角矩阵。
定义:

则李雅普诺夫函数对时间的导数为
通过调整Γ1、Γ2、Γ3、ε4、ε5,可以保证:

其中,

4 仿真实验
通过采用5艘船舶证明所提出的同步控制策略的有效性,仿真采用5艘相同CybershipII船模,船模参数见文献[12]。
设定船舶之间的通信拓扑结构图如图1所示:

图1 船舶的通信拓扑Fig.1 The communication topology of the vessels
则通信拓扑图的权值邻接矩阵为

设定船舶的期望轨迹分别为
5艘船舶的初始位置、速度和加速度分别为

假设外界环境未知时变扰动为[13]

设定控制器和观测器参数为
图2给出了5艘船的同步运动轨迹,可以看出此控制器能实现船舶的同步运动。图3和图4分别给出了状态观测器对位置和速度的估计误差情况,可以看出该观测器能较好的对未知状态进行估计。

图2 多船同步运动轨迹效果Fig.2 The move curves of vessels

图3 船舶的位置估计误差Fig.3 The estimated errors of position of vessels

图4 船舶的速度估计误差Fig.4 Estimated errors of velocity of vessels
图5 和图6给出了船舶的同步位置和同步速度效果。
图7给出了扰动观测器对未知扰动的估计情况。
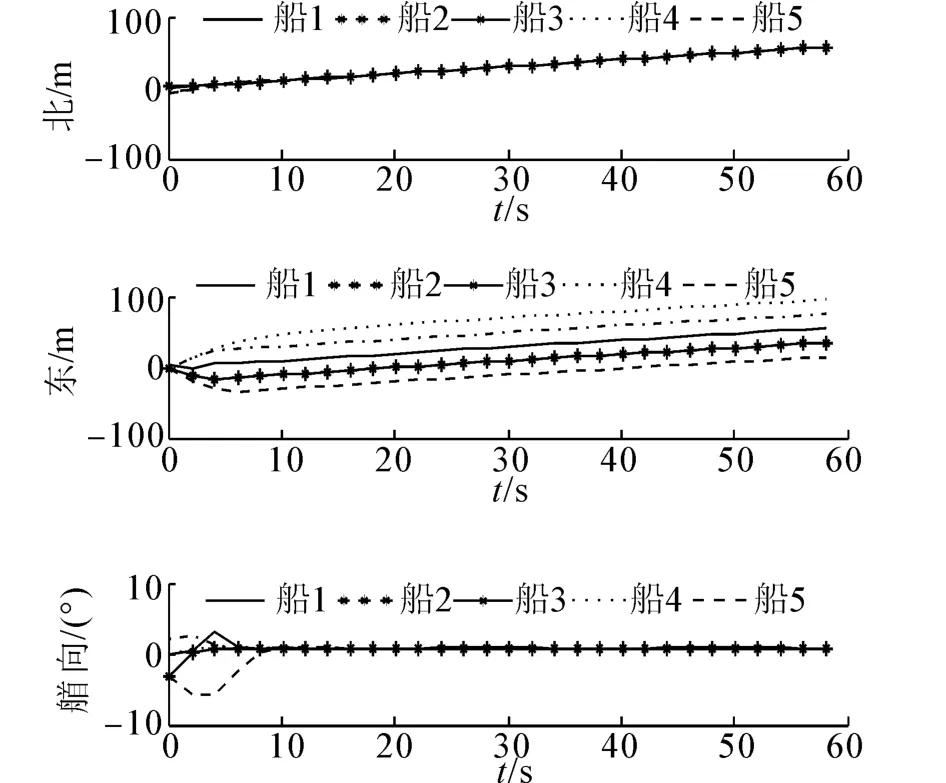
图5 多船的位置同步效果Fig.5 The synchronization position of vessels
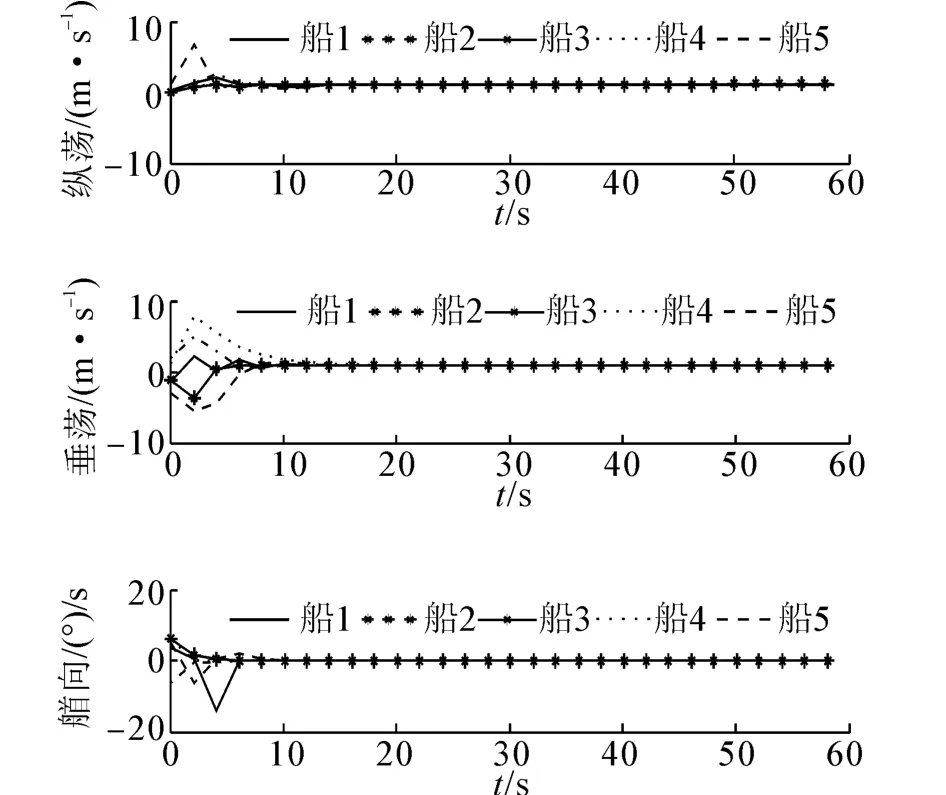
图6 速度同步效果Fig.6 The synchronization velocity of vessels
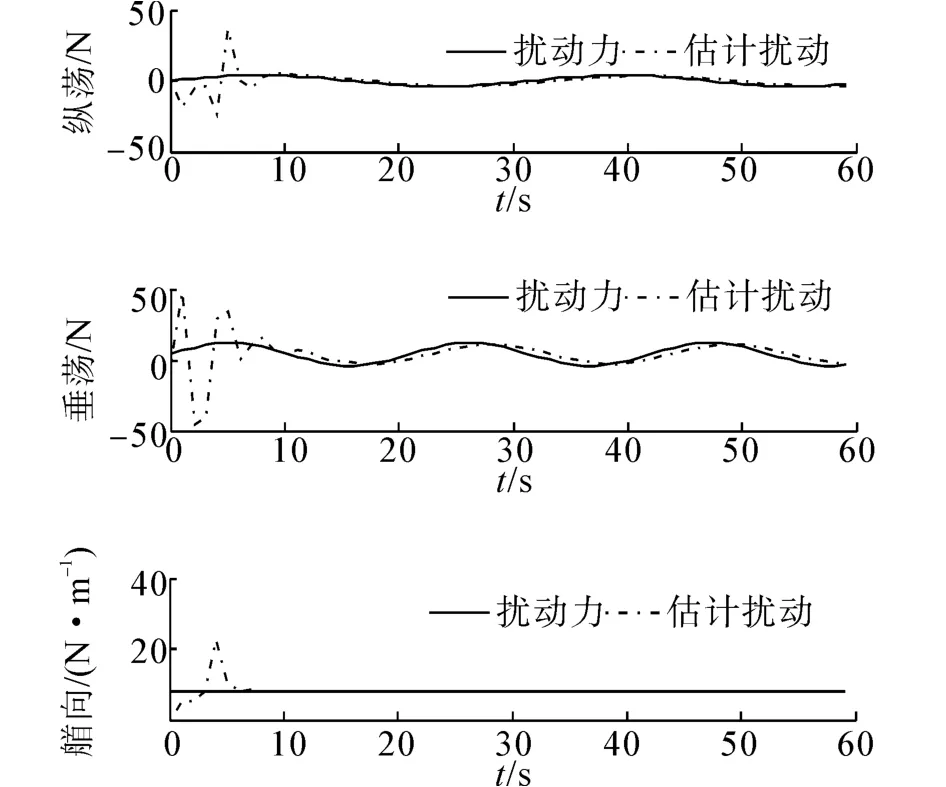
图7 扰动及其估计值Fig.7 The disturbance force and estimate
5 结束语
针对多艘船舶的同步运动控制研究,在外界时变扰动未知和船舶状态不全可测的情况下,采用了非线性状态观测器和扰动观测器,并且利用了数学图论中的有向图来描述船舶之间的通信拓扑,该种通信结构不要求船舶之间的通信是双向的,由此设计了基于状态观测器的多艘船舶鲁棒同步控制策略。最后,仿真结果证明了所设计控制算法的有效性。
[1]ALEJANDRO⁃ANGELES A.Synchronization of mechanical systems[D].The Netherlands:Eindhoven University of Technology,2002:66⁃88.
[2]PENG Zhouhua,WANG Dan,LI Tieshan,et al.Leaderless and leader⁃follower cooperative control of multiple marine surface vehicles with unknown dynamics[J].Nonlinear Dy⁃namics,2013,74(1/2):95⁃106.
[3]KYRKJEBØ E,PANTELEY E,CHAILLET A,et al.A vir⁃tual vehicle approach to underway replenishnment[J].Lec⁃ture Notes in Control and Information Science,2006,336:171⁃189.
[4]KYRKJEBØ E,PETTERSEN K Y,WONDERGEM M,et al.Output synchronization control of ship replenishment opera⁃ tions:Theory and experiments[J].Control EngineeringPrac⁃tice,2007,15(6):741⁃755.
[5]RODRGUEZ⁃ÁNGELES A,NIJMEIJER H.Cooperative syn⁃chronization of robots via estimated state feedback[C]//Proceedings of the 42nd IEEE Conference on Decision and Control.[S.l.],2003:1514⁃1519.
[6]FOSSEN T I,GRØVLEN A.Nonlinear output feedback con⁃trol of dynamically positioned ships using observer backstep⁃ping[J].IEEE Transactions on Control Systems Technology,1998,6(1):121⁃128.
[7]KYRKJEBØ E.PETTERSEN K Y.Tracking from a synchro⁃nization control perspective[C]//Proceedings of 17th IMACS World Congress.Paris,2005:17⁃19.
[8]王仲.相对漂浮船舶动力定位的跟踪控制方法研究[D].哈尔滨:哈尔滨工程大学,2008:203⁃300.WANG Zhong.Relative floating ships dynamic position tracking control[D].Harbin:Harbin Engineering Universi⁃ty,2008:203⁃300.
[9]王丹丹.救助船相对受援船动力定位方法研究[D].哈尔滨:哈尔滨工程大学,2010:1⁃85.WANG Dandan.Research on relative dynamic positioning method between rescue vessel and wreck vessel[D].Har⁃bin:Harbin Engineering University,2010:1⁃85.
[10]PENG Zhouhua,WANG Dan,LAN Weiyao,et al.Robust leader⁃follower formation tracking control of multiple under⁃actuated surface vessels[J].China Ocean Engineering,2012,26(3):521⁃534.
[11]付明玉,焦建芳,张爱华.基于虚拟领航者的多艘船舶协调路径跟踪控制[J].华中科技大学学报:自然科学版,2013,41(2):102⁃108.FU Mingyu,JIAO Jianfang,ZHANG Aihua.Coordinated path following control for multiple surface vessels by using virtual⁃leader[J].Journal of Huazhong University of Sci⁃ence and Technology:Nature Science,2013,41(2):102⁃108.
[12]KYRKJEBØ E.Motion coordination of mechanical systems:leader⁃follower synchronization of Euler⁃Lagrange systems using output feedback control[D].Trondheim,Norway:Norwegian University of Science and Technology,2007:102⁃108.
[13]DING Fuguang,WU Jing,WANG Yuanhui.Stabilization of an underactuated surface vessel based on adaptive sliding mode and backstepping control[J].Mathematical Problems in Engineering,2013,2013:1⁃5.
Robust synchronization control of multiple vessels with state observer
DING Fuguang1,MA Yanqin1,2,WANG Yuanhui1,LI Jiangjun1
(1.College of Automation,Harbin Engineering University,Harbin 150001,China;2.Qingdao Branch,Institute of Acoustics,Chi⁃nese Academy of Sciences,Qingdao 266023,China)
In order to implement multiple vessels synchronization movement and thus fulfill assignments at sea,a ro⁃bust synchronization control strategy with state observer was specified.Firstly,the vessel model was established.Secondly,a disturbance observer to estimate unknown disturbance was presented.Meanwhile,the desired path for each vessel was planned and a directed graph that describes the communication network of vessels was proposed.In addition,the synchronization error was applied into the controller to control the vessels achieve synchronization movement.When velocity and accelerate of vessels were unavailable,a nonlinear state observer was designed for each vessel to get the estimated values of speed and acceleration of vessels.Thirdly,the stability of the proposed synchronization movement was proven utilizing the Lyapunuy theory.Finally,simulation results indicated the de⁃signed control strategy can solve the synchronization movement problem accurately.
vessel movement control;synchronization control;disturbance observer;nonlinear state observer;ro⁃bust control
10.3969/j.issn.1006⁃7043.201404001
U661.338
:A
:1006⁃7043(2015)06⁃0789⁃06
http://www.cnki.net/kcms/detail/23.1390.u.20150428.1119.025.html
2014⁃04⁃01.网络出版时间:2015⁃04⁃28.
国家自然科学基金资助项目(51209056);中央高校基本科研业务费资助项目(HEUCF041401).
丁福光(1963⁃),男,教授,博士生导师;王元慧(1981⁃),女,副教授.
王元慧,E⁃mail:wangyuanhui@hrbeu.edu.cn.
