基于单机动平台的滑窗式最小二乘定位算法
2015-06-23关欣,关欣,陶李,衣晓
关 欣,关 欣,陶 李,衣 晓
(1.海军航空工程学院电子信息工程系,烟台 264001;2.海军航空工程学院航空训练基地,青岛 266108)
工程与应用
基于单机动平台的滑窗式最小二乘定位算法
关 欣1,关 欣1,陶 李2,衣 晓1
(1.海军航空工程学院电子信息工程系,烟台 264001;2.海军航空工程学院航空训练基地,青岛 266108)
针对纯方位系统下扩展卡尔曼滤波等递推算法性能不稳定,最小二乘定位算法计算量大、实时性差的特点,提出了一种改进的最小二乘定位算法。该算法根据目标与平台之间的几何关系得到一个包含目标初始位置和分量速度的伪线性方程组。为减少求解方程组的计算量,保证定位的实时性,对常规的最小二乘法进行了加滑窗处理,并进一步将方程组的解表示为递推形式。仿真实验验证了算法的有效性,并比较了平台做不同机动运动的定位性能,给出了满足一定精度时平台的机动策略。
无源定位;纯方位系统;最小二乘法;滑窗式
0 引 言
随着电子对抗技术的不断进步,欺骗雷达获取目标频率、相位等信息的手段不断增强,导致到达角度成为无源被动雷达系统可以检测到的可信度最高的目标信息[1]。因此对基于角度信息的无源定位进行深入研究具有十分重要的意义[2-4]。
基于角度信息的无源定位本质上属于非线性估计问题,由于系统的非线性程度较高,并且不易获得高精确度的初始条件,导致扩展卡尔曼滤波(expand Kaman filter,EKF)[5]等递推算法存在较大的线性化误差,在收敛速度和定位精度等方面性能欠佳。普通最小二乘误差算法(least-squared error,LSE)[6-7]虽然将非线性方程利用几何关系转化为伪线性方程,但同时也将噪声引入系数矩阵,从而导致其估计有偏且协方差增大。总体最小二乘估计算法(total least-squared,TLS)[8-12]虽然通过奇异值分解法,使有偏问题得到解决,但其运算量大,实时性差。Pages-Zamora、Vidal和Brooks基于蜂窝电话系统的应用需求提出了一种最小二乘误差定位算法[13-14],但该方法主要用于多个固定观测站对固定目标定位的情况。
本文提出了一种改进的滑窗式最小二乘定位算法(sliding window least-squares,SWLS)。其基本思想是将平台与目标之间的几何关系用向量方式表示,得到一个伪线性方程组,通过对该方程组求解获得目标的位置信息。采用滑窗形式获得方程组的系数矩阵和观测向量可以有效避免观测向量和系数矩阵维数随时间不断增大的问题,大大减少了求解方程组的时间,提高了定位速度。
1 定位原理
以二维空间为例,目标T与平台O的几何关系示意如图1所示。
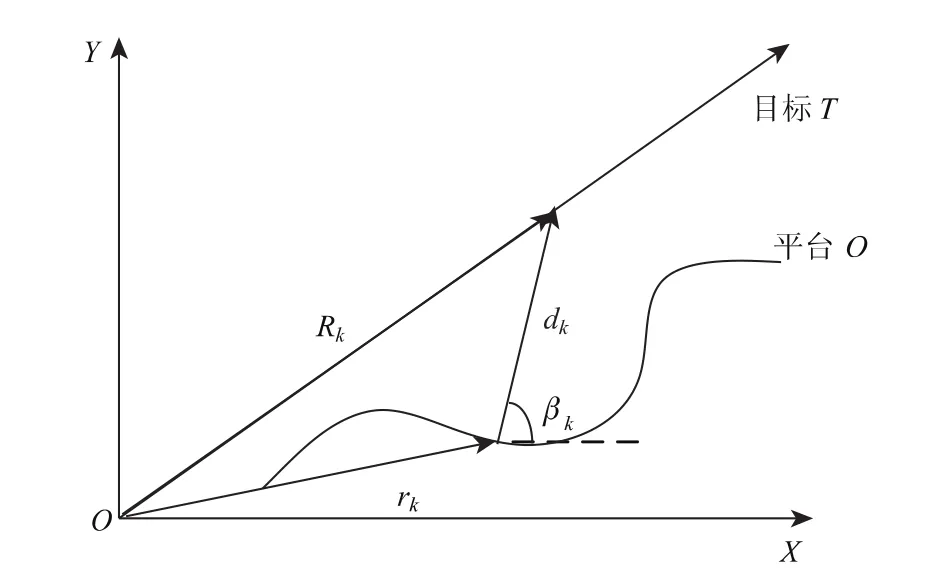
图1 平台与目标之间的几何关系
显然,k时刻目标与平台有如下关系

其中dk表示k时刻目标与平台之间的距离,vk表示对应的方位单位矢量。假设此时目标T的位置为(xTk,yTk),平台的位置为(xk,yk),它们与目标的方位角分别为βk,则有

假设目标T作匀速直线运动,初始位置为(xT0,yT0),x方向和y方向的速度分别为vx和vy,则k时刻目标位置可以表示为

将式(3)代入到式(2)中,并将矩阵改写成方程组形式,有

整理式(4)并消去dk,可得

将k时刻的累积测量记成矩阵形式

其中观测向量Z和系数矩阵H分别为
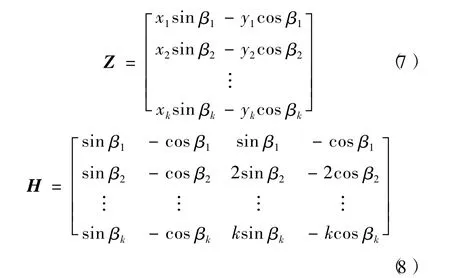
状态变量X为

2 算法模型
对于观测向量Z,通常有采样次数k>2,所以该矩阵是超正定的。这样H的逆矩阵不存在,必须使用广义逆矩阵进行求解。k时刻式(6)的最小二乘解为

当观测次数为k时,系数矩阵Hk是一个k×4维矩阵,观测向量Zk是一个k×1维向量。随着观测次数的递增,Hk和Zk的维数也不断增大,为求得式(6)的最小二乘解Xk的计算量将呈爆炸式增长。
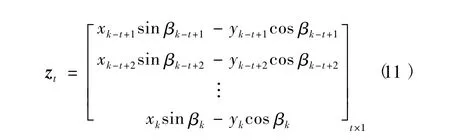
为解决这一问题,本文采用滑窗方式实现系数矩阵H和观测向量Z的动态序贯更新,这样可以在保证定位精度的前提下,大大减小求解方程组的计算量。记滑窗部分的观测向量zt和系数矩阵ht分别为

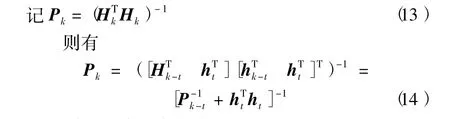
利用矩阵反演公式可得

其中I4表示4阶单位矩阵,这样Pk可由Pk-t递推得到,由式(10)可知

将式(14)代入上式,并化简可得

这样Xk可由Xk-t递推得到。
算法具体步骤如下:
(1)观测次数k小于l时,观测向量Zk和系数矩阵Hk分别由式(7)和(8)确定,通过式(10)求解Xk,式(13)计算Pk,并根据Xk中目标的初始位置和速度进一步获得目标的位置信息,Xk和Pk将作为k +t时刻的递推初值;
(2)观测次数k大于l时,观测向量zt和系数矩阵ht分别由式(11)和(12)确定,以Pk-t和Xk-t为初值,通过式(14)和式(16)计算得到Pk和Xk,并确定k时刻目标位置。
不难看出,当l=k时,算法即为普通最小二乘法;当t=1时,算法则为递推式最小二乘法。
在纯方位系统下,单机动平台对目标进行无源定位,方位角测量误差服从正态分布,对目标初始位置和分量速度的估计是无偏的。三维情况下,利用传感器测量得到的方位角和俯仰角,同样根据目标与平台之间的几何关系列出伪线性方程组,求解目标的初始位置和运动速度。
3 算法仿真
仿真环境如下:辐射源目标以200 m/s的速度作匀速直线运动,运动方向与X轴正方向夹角为45°,起始点为(5000,0)。方位角测量周期为1 s,连续观测200点,滑窗长度为5,测量噪声服从零均值正态分布。进行100次Monte-Carlo实验,以圆概率误差(circular error probability,CEP)衡量算法的定位精度。

仿真实验1:与不同算法定位精度比较。测量误差标准差σ为0.5°时,扩展卡尔曼滤波算法、最小二乘法、总体最小二乘估计算法以及本文算法定位性能如图2所示,最小二乘法、总体最小二乘估计算法以及本文算法的运算时间如图3所示。
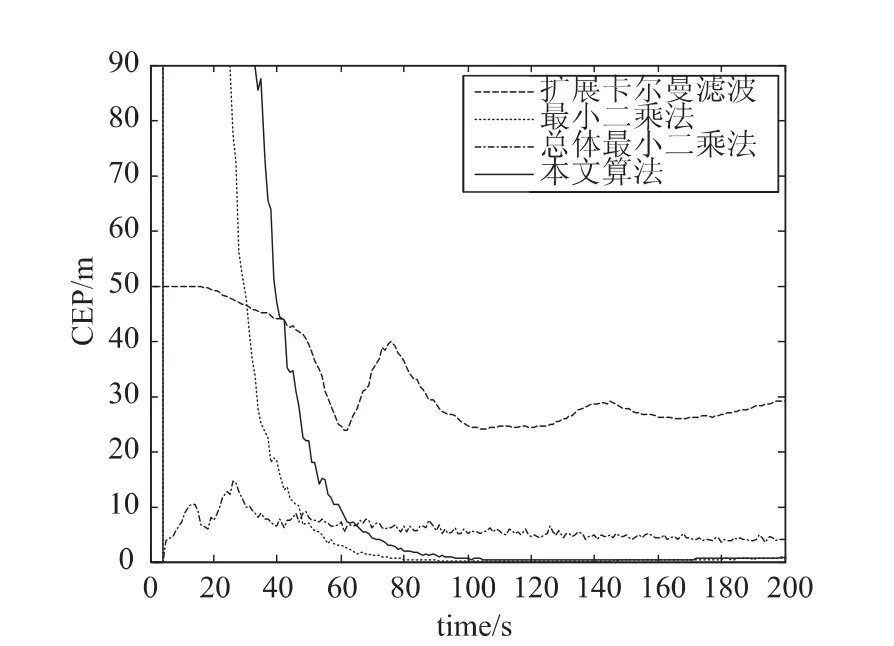
图2 不同算法定位精度比较
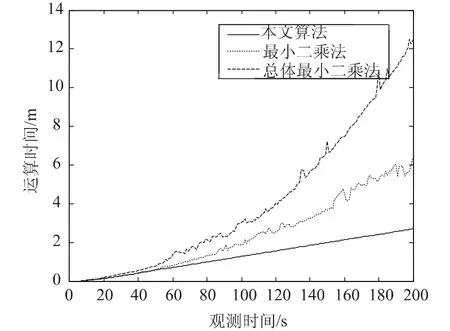
图3 不同算法运算时间比较
由图2可以看出,本文算法收敛后的定位精度与最小二乘法相近,但明显高于扩展卡尔曼滤波和总体最小二乘法。图3表明,本文算法和最小二乘法的运算时间随着观测点的增多基本成线性增长,且本文算法的运算时间明显少于最小二乘法,而总体最小二乘法则呈指数增长。
仿真实验2:平台以3 m/s2的加速度进行运动,滑窗长度取值不同时,算法的定位精度和运算时间如图4和图5所示。
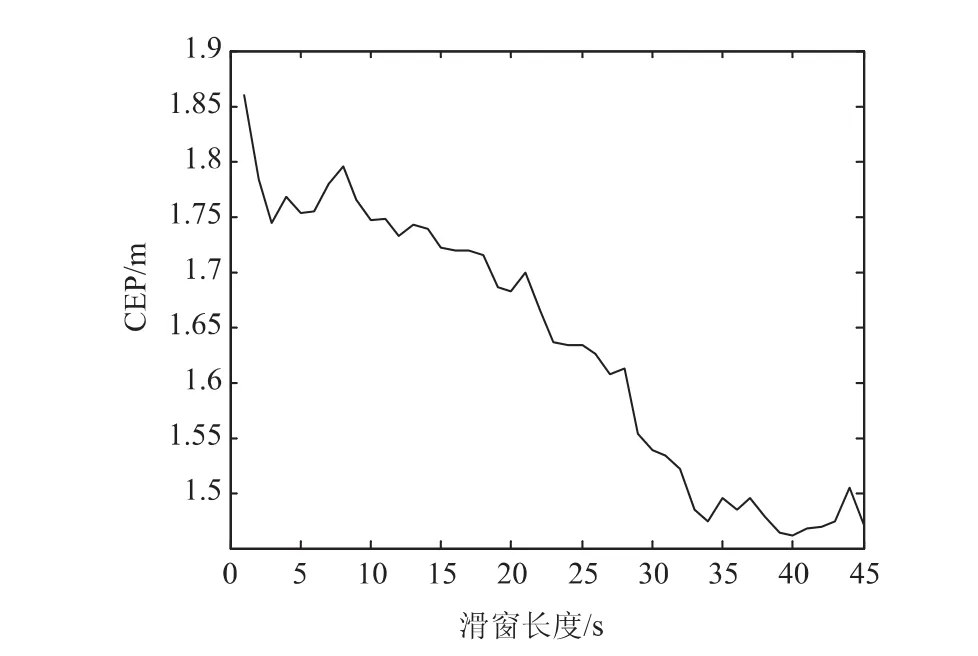
图4 滑窗长度对定位精度的影响
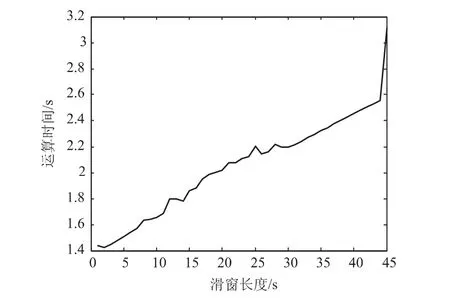
图5 滑窗长度对运算时间的影响
由图4和图5可以看出,滑窗越长,算法的定位精度越高,但运算时间也随之增加,在实际应用中,可根据具体需求选择合适的滑窗长度。
仿真实验3:平台分别以3 m/s2、5 m/s2、7 m/s2加速度进行加速运动的定位精度如图6所示。
可以看出,加速度越大,收敛速度越快,但收敛后的定位精度越差,在实际应用中,可以根据实际情况选择加速度的大小。
仿真实验4:平台做交替圆周运动,每完成半个圆周运动改变一次运动方向,各圆心连线与X正半轴夹角为45°,运动示意图如图7所示,运动速率为200 m/s,运动半径分别为1 km、5 km、10 km时定位精度如图8所示。
图6 匀加速不同加速度定位精度比较
图7 交替圆周运动示意图
图8 不同半径下交替圆周运动定位精度比较
由图8可以看出,平台所作的圆周运动半径越小,定位精度收敛速度越快,但半径的大小对收敛后的定位精度影响不大,同时与图4对比,平台做交替圆周的定位精度要高于加速运动。
其他条件均相同,圆周半径为1 km,运动速率分别为200 m/s、300 m/s、400 m/s时,定位精度如图9所示。
由上图可以看出,速率越小收敛速度越快,但收敛后的定位精度越差。
仿真实验5:平台作变加速直线运动,加速度绝对值分别为5 m/s2、10 m/s2、15 m/s2,以30 s为周期分别作匀加速和匀减速运动,初速度为100 m/s,运动方向与X正半轴夹角为45°,算法定位精度如图10所示。
9 不同速率下交替圆周运动定位精度比较
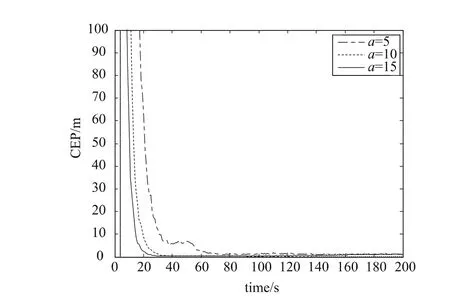
图10 不同加速度下变加速运动定位精度比较
如图10所示,平台的加速度绝对值越大,收敛速度越快,但对收敛后的定位精度影响不大。
加速度为15 m/s2,变加速运动加速度改变的周期分别为20 s、40 s、60 s时定位精度如图11所示。
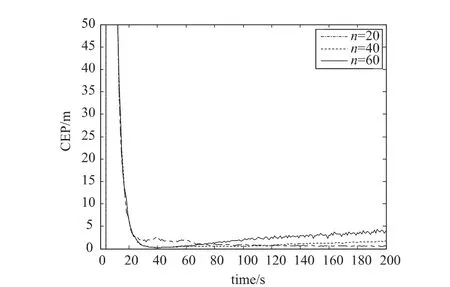
图11 不同周期下变加速运动定位精度比较
由图11可以看出,周期的改变不影响收敛速度,却影响收敛后的定位精度,周期越短定位精度越高。
4 结 语
(1)通过滑窗方式改进的最小二乘定位算法适用于单机动平台下的无源定位,具有无偏性;
(2)该算法可以实现对目标的准确快速定位,具有比扩展卡尔曼滤波算法和总体最小二乘定位算法更好的定位精度,具有比最小二乘定位算法更快的运算速度,在保证定位精度的前提下,同时可以减少定位时间;
(3)通过仿真实验3、4、5,可以根据实际应用中对定位精度CEP和收敛速度的不用要求给出不同的平台机动策略。
若要求定位精度CEP优于10 m,则仿真实验2、3、4的机动策略均可以满足此要求,此时可根据实际情况选择适合的机动策略;若要求CEP优于5 m,可以选择仿真实验3和4的机动策略;
若要求收敛时间少于60 s,则可以选择仿真实验2和4的机动形式,若选择3的机动形式,则要求圆周半径小于5 km,运动速率小于300 m/s;若要求收敛时间少于40 s,可以选择仿真实验4的机动策略,仿真实验2的机动策略需要加速度大于7 m/s2,仿真实验3的机动策略需要速率小于300 m/s;若要求收敛时间小于20 s,选择3的机动策略,要求圆周半径小于1 km,速率小于200 m/s,选择4的机动策略,要求加速度小于5 m/s2。
[1] HU XIAO-HUI,ZHANG ZHONG-ZHAO,XIE KAI. Passive Lo-cation Analysis In Bearing-only Constellation System[J].IEEE Transactions on Aerospace and Electronic System,2010:1398-1402.
[2] GHAREHSHIRAN O N,KRISHAMURTHY V.Coalition formation for bearings-only lacalition in sensor networks-a cooperative game approach[J].IEEE transactions on signal processing.2010,58(8):4322-4338.
[3] 王燊燊,冯金富,李骞,等.基于角度信息的近空间雷达网定位算法[J].空军工程大学学报:自然科学版,2012,13(1):33-36.
[4] 张凯,刘洋.慢速目标仅测角无源定位算法研究[J].雷达科学与技术.2014,3:291-296.
[5] FUCHENG G,ZHONGKANG S,KAN H.A modified covariance extended Kalman filtering algorithm in passivelo-cation[C]//Proceedings of 2003 IEEE Internationak Conference on Robotics,Intelligent System and Signal Processing.Shenyang:IEEE,2003:307-311.
[6] 何青益,赵地.基于最小二乘方法的单机侧向定位算法[J].舰船电子对抗,2013,36(1):37-39.
[7] 莫成坤,陈树新,吴昊,张艺航.基于角度信息的递推最小二乘无源定位算法[J].计算机测量与控制,2014,22(9):2863-2866.
[8] 吴昊,陈树新,张衡阳,等.基于总体递推最小二乘的单站无源定位仿真分析[J].火力与指挥控制,2013,38(6):19-22.
[9] AIDALA V J,NARDONE SC.Biased estimation properties of the Pseudo-linear tracking filter[J].IEEE Transactions on Aerospace and Electronic System,1982,18(4):432-441.
[10]HO K C,CHAN Y T.An asymptotically unbiased estimator for bearings-only tracking and Doppler-bearing target motion analysis[J].IEEE Transactions on Signal Processing,2006,54(3):809-821.
[11]BERTRAND A,MOONEN M.Consensus-based distributed total least squares estimation in ad hoc wireless sensor networks[J].IEEE transactions on signal processing,2011,59(5):2320-2330.
[12]DOGˇANçAY K.Relationship between geometric translations and TLS estimation bias in bearings-only target localization[J].IEEE Transactions on Signal Processing,2008,56(3):1005-1017.
[13]Pages-Zamora,A JVidal,D Brooks.Closed-form Solution for Positioning Bases on Angle of Arrival Meas-urements[C]//PIMRC 2002.
[14]刘聪锋.无源定位与跟踪[M].西安:西安电子科技大学出版社,2011.
关 欣(1990—),女,黑龙江人,硕士生研究生,主要研究方向为无源定位;
E-mail:378887027@qq.com
关 欣(1978—),女,辽宁人,博士,教授,硕士生导师,主要研究方向为智能信息处理,多源信息融合;
陶 李(1989—),男,山东人,硕士,主要研究方向为多源信息融合,目标识别;
衣 晓(1976—),男,山东人,博士,教授,硕士生导师,主要研究方向为无线传感器网络,多源信息融合。
Least-square Localization A lgorithm Based on Single Platform in Sliding W indow W ay
GUAN Xin1,GUAN Xin1,TAO Li2,YIXiao1
(1.Department of Electronic and Information Engineering Naval Aeronautical Engineering Academy,Yantai,264001,China;2.Aviation Training base,Naval Aeronautical Engineering Academy,Qingdao 266108,China)
In view of the unstable performance of recursionmethod,such as expand Kaman filter,large amount of calculation and poor real-time performance of least squares localization algorithm,this paper puts forward an improved least square method.The algorithm based on the geometric relationships between the target and platforms gets a pseudo linear system of equations including the initial position and velocity of target.To reduce the amountof calculation for solving system of equations and ensure real-time positioning,the paper deal with the conventional least squaremethod in a sliding window way,and further expressed the solution of equations as the recursive form.Simulations experiments verify the effectiveness of the algorithm,compared the positioning performance when platform doing differentmaneuvering,giving themobile strategy that can obtain the position performance.
passive location;bearings-only system;least squaremethod;sliding window way
TN957/TP274
A
1673-5692(2015)05-557-06
10.3969/j.issn.1673-5692.2015.05.019
2015-07-28
2015-9-20
教育部新世纪优秀人才支持计划(NCET-11-0872)
