面向空间应用的单向微膨胀型热开关特性分析
2015-06-15马明朝郭亮张旭升吴清文
马明朝 郭亮 张旭升 吴清文
(1 中国科学院长春光学精密机械与物理研究所,长春 130033)(2 中国科学院大学,北京 100049)
面向空间应用的单向微膨胀型热开关特性分析
马明朝1,2郭亮1张旭升1吴清文1
(1 中国科学院长春光学精密机械与物理研究所,长春 130033)(2 中国科学院大学,北京 100049)
为了提高探测器等航天器的温度控制精度,降低热波动造成的影响,基于金属的热胀冷缩原理设计了一种单向膨胀型热开关,利用二维稳态导热原理进行建模分析,得到热开关热特性参数。搭建了试验平台模拟热开关工作环境,测定不同功率条件下热开关的工作状态以及相关性能参数。当加热功率为0.4 W时开关断开热阻为230.46 K/W;功率为30 W时开关的导通热阻为0.302 2 K/W,开关控制比为762.6。结果表明,试验数据与理论计算数据吻合较好,进一步说明了热开关的结构合理性以及适用性。
热控制;单向微膨胀型;热开关;特性参数;温度变化;航天器
1 引言
为了解决航天器在轨运行时由于外热流变化剧烈以及频繁工作引起的热控设计问题,一种热开关主动控制方法[1-3]引起了人们的关注。热开关是一种能够根据需求控制部件之间热连接关系的热控装置,具有节能、可实现温度自动控制等特点,早在20世纪60年代,国内外很多研究机构(如美国、欧洲航天局)就已经开始了对这种主动热控方法的研究,并且已经成功应用到航天器设备当中[4]。与传统的散热装置相比,热开关能够更好地疏导空间设备的散热路径,无需外加动力,安装要求相对较低,可根据散热需求定制相应的结构类型。
传统的热开关类型主要包括接触式热开关[5]、气隙液隙式热开关[6]、场效应式热开关[7],由于其结构紧凑、体积小、质量轻、可实现多次开关等一系列优点,被应用于多种空间设备。美国JPL及卫星系统研究公司联合研制的应用于火星探测器的石蜡型驱动热开关[8],主要用于在火星恶劣热环境下保持蓄电池温度在-20~30℃,其中热开关的热连接段与驱动段之间缝隙为1.0 mm,开关比接近100。美国Swales航天中心研制的一种用于低温制冷系统的单向微膨胀热开关[9],第一代热开关的工作温度区间为20~300 K,断开热阻可达到1 400 K/W。国内中科院理化所的王美芬等研制的一种用于低温制冷领域的单向微膨胀热开关,结构长度在20~40 mm之间,热开关闭合热阻小于1.1 K/W,断开热阻大于1 400 K/W,开关比可达1 281~1 410[10]。以上不同系列的热开关针对相应热环境设计,解决了特定空间设备的散热及温度控制需求。
本文基于金属的热胀冷缩性质设计了一种单向微膨胀型热开关,针对其结构进行传热性能分析,通过试验模拟热开关的工作环境,测定了同等试验条件下的工作状态,分析热开关的重要性能参数指标。试验表明理论分析的结果与试验结果吻合较好。
2 热开关传热性能分析
2.1 建模分析
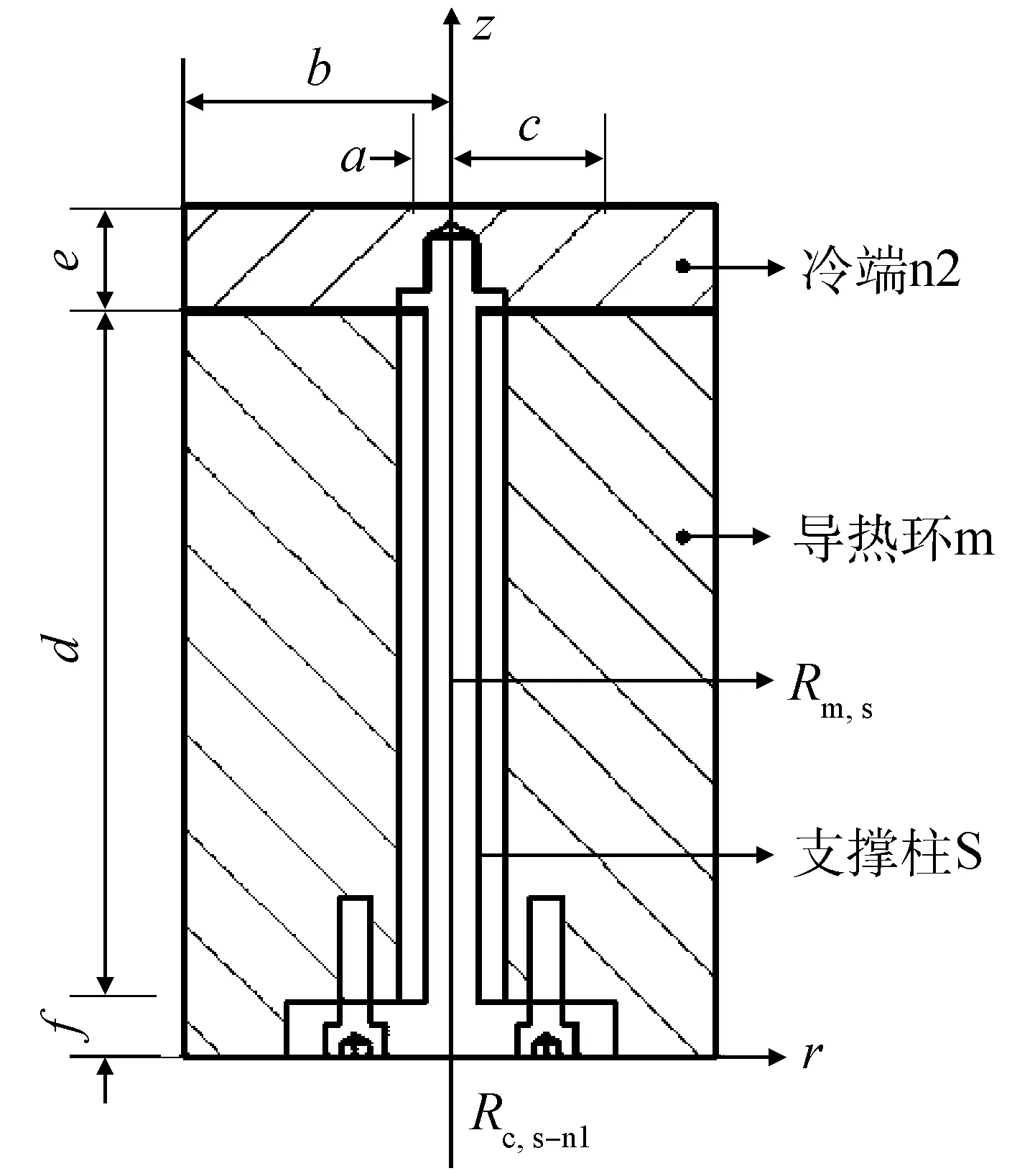
图1 热开关示意
基于微膨胀型热开关的工作原理,分析其传热特性是设计该热控装置的基础。设计的热开关结构如图1所示,主要由冷端、导热环、支撑柱三部分组成,其中冷端与热沉软连接,导热环底部与散热部件连接。热开关工作时,导热环由于受到设备温度升高影响,发生线性膨胀与冷端闭合,形成低热阻导热通路,从而解决设备散热问题。当设备温度降低,导热环与冷端断开,热开关整体热阻变大,阻碍设备散热,起到保温作用。依据二维稳态导热原理分析热开关传热性能,一般条件下为了获得导热物体温度场,根据能量守恒以及傅里叶定律来建立物体中的温度场分布。针对微元体,按照能量守恒以及任意时间段内的热平衡可以得到三维非稳态导热微分方程
(1)

结合设计的热开关结构特性,在热端起始段、导热环及冷端起始段中,导热过程可简化为沿轴向的一维导热模型;由于各安装面之间存在接触热阻,其余部分均采用二维导热模型。故该二维稳态无内热源的导热微分方程为
(2)
式中r为热开关的直径;T为热开关内部温度变化。边界条件如下:
(3)
式中l为热开关结构长度;T0为热开关热端初始温度;T1为导热环与冷端接触温度。通过建立热开关传热模型来分析在非稳态情况下,热开关内部温度随时间变化的分布情况,最终确定相应时间和温度条件下,热开关的工作状态及特性参数。
2.2 热阻计算
对热开关主体结构进行简化来计算热阻分布,如图2所示。中间支柱的热阻用Rm,s来表示;Rc,n2-d为冷端与导热环的接触热阻;Rm,n1-w、Rm,d、Rm,n2-w分别为热端、导热环、冷端的热阻。由于热开关中间支柱与冷端和导热环通过螺纹固定,因此在支柱与热端、冷端都存在一定的接触热阻,分别为Rc,s-n1和Rc,s-n2。中间支撑柱的底部热阻以及与导热环相接触部分的热阻分别为Rm,n1、Rc,s-n3、Rc,n1。
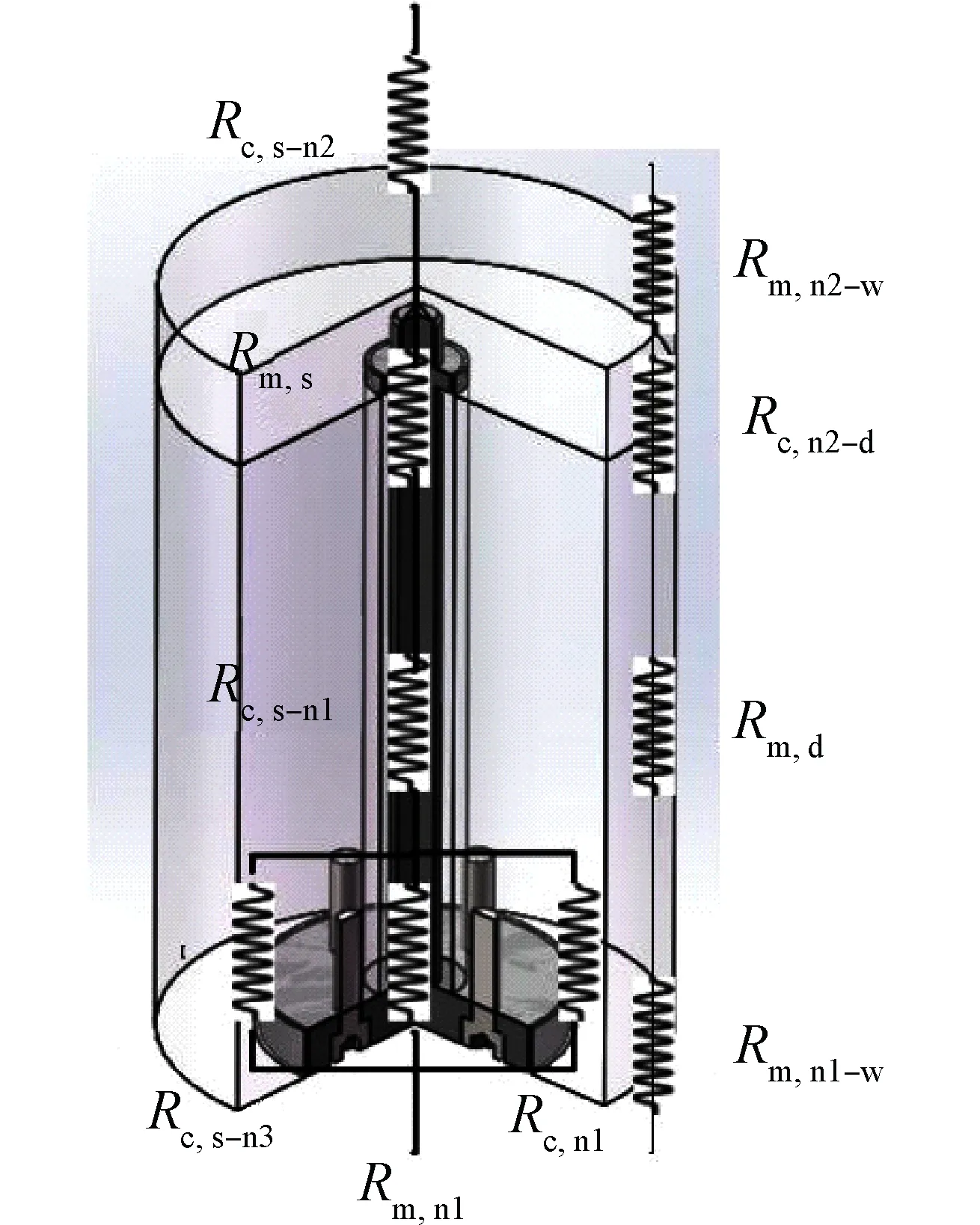
图2 热阻分布示意
(4)

对热开关的热阻模型进一步简化得到图3中各热阻的串并联关系,推导出导通、关断状态下热开关的导通热阻Ron和切断热阻Roff:
(5)
(6)
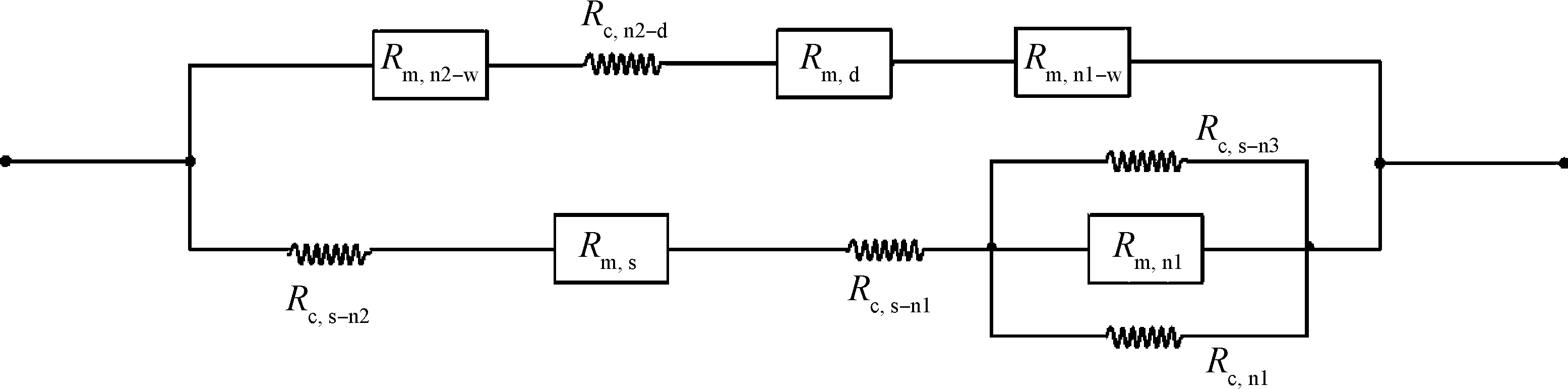
图3 热开关一维传热热阻模型
基于以上各式,结合热开关各结构尺寸参数a=2.5 mm,b=25 mm,c=15 mm,d=50 mm,e=10 mm,f=10 mm分别计算各部分热阻,所得结果如表1所示。

表1 热开关各部分热阻
通过对热开关的热模型分析,可以得出热开关在导通状态下的热阻Ron=0.232 K/W,切断状态下热阻Roff=293.2 K/W,开关的控制比达到了1 273,开关比能够很好地反映热开关的总体性能,是热开关重要的特性参数,控制比越大表明热开关能够达到大的断开热阻以及小的闭合热阻,其性能也就越好。为了进一步验证热开关的特性,设计一套试验方案来测试和检验热开关的性能,将得到的试验参数与理论数值进行对比分析。
3 试验性能评估
3.1 试验原理及方法
微膨胀型热开关主要由冷端、导热环、支撑柱三部分组成,其中冷端和导热环都采用导热系数较高的1 100铝合金材料,支撑柱则采用线胀系数较低并且导热系数较小的铟钢。如图4所示,整个试验系统由加热、数据采集、冷却、隔热四部分构成。热开关主要工作状态分为以下两个阶段:保温状态下,热开关底部导热环受热负载较小,开关处于切断状态;散热状态下,随着加热功率增大导热环受到温度发生线性膨胀,当导热环的线胀程度大于支撑柱时,开关导通形成散热通路,热量通过散热器和恒温水箱所构成的冷却系统散失,当导热环温度下降到一定温度后,开关自动断开恢复到节能保温状态。
为了测定热开关在不同负载条件下的工作状态,通过改变聚酰亚胺加热片两端的电压值来分别设定了0.4~30W之间的11个加热功耗,检测不同工况条件下热开关的热特性,分析其传热性能。为了减小试验过程中的热量流失,热开关表面包覆一层10mm厚的隔热材料,试验结果表明热损失为5%。整个试验过程中热开关表面的温度状态主要通过粘贴在其表面的T型热电偶测得,具体各个测点的位置状态如图4所示,热电偶1~3测量冷端表面温度,4~6测量冷端外壁温度,7~9和10~12分别测定导热环外壁表面温度,13~15测量导热环底面温度。
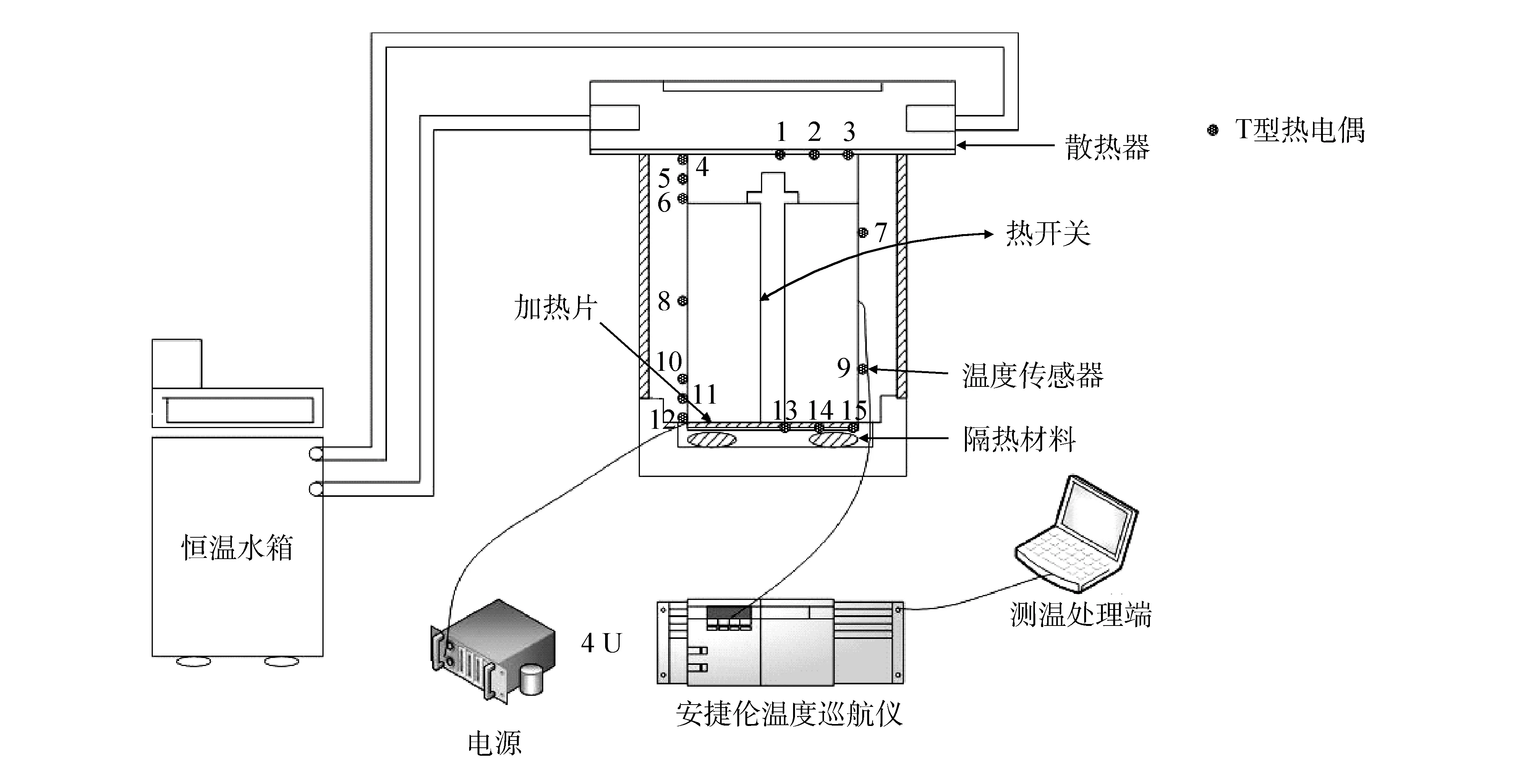
图4 试验平台
3.2 试验系统漏热及效率分析
为了保证试验的有效性,以得到热开关最佳的性能指标,需要对试验过程中存在的漏热以及加热效率进行分析计算。图5反映了在实际功率条件下热开关表面温度随负载增大的变化情况,其中ΔT为测点4与测点11的温度差。通过对试验数据的分析发现,试验过程中由于无法做到完全隔热导致实际加热功率小于理论的加热负载,具体的效率曲线如图6所示。其中小功率条件下热量散失较少,负载为0.4W时其加热效率可达98.90%;随着温度升高,加热效率逐渐下降,当加热功率为30W时,整个加热回路的效率为89.16%,实际的加热功率为26.75W。
为了防止热量流失,整个热开关表面包覆导热系数为0.06的隔热材料,由于隔热材料外表面接触空气,会产生一定的对流换热,整个热开关表面积A=0.013 m2,空气散失的热量

(7)
式中A为换热面;h为对流换热系数,空间自然对流情况下一般为2~10;ΔT为固体表面与空气间的平均温差,最大为20℃。通过计算可知通过对流散失热量为Φ=2.6 W。实际加热功率为27.4W,基本与试验测定的加热功率26.75W相符。因此,热损失对整个试验造成的影响较小。
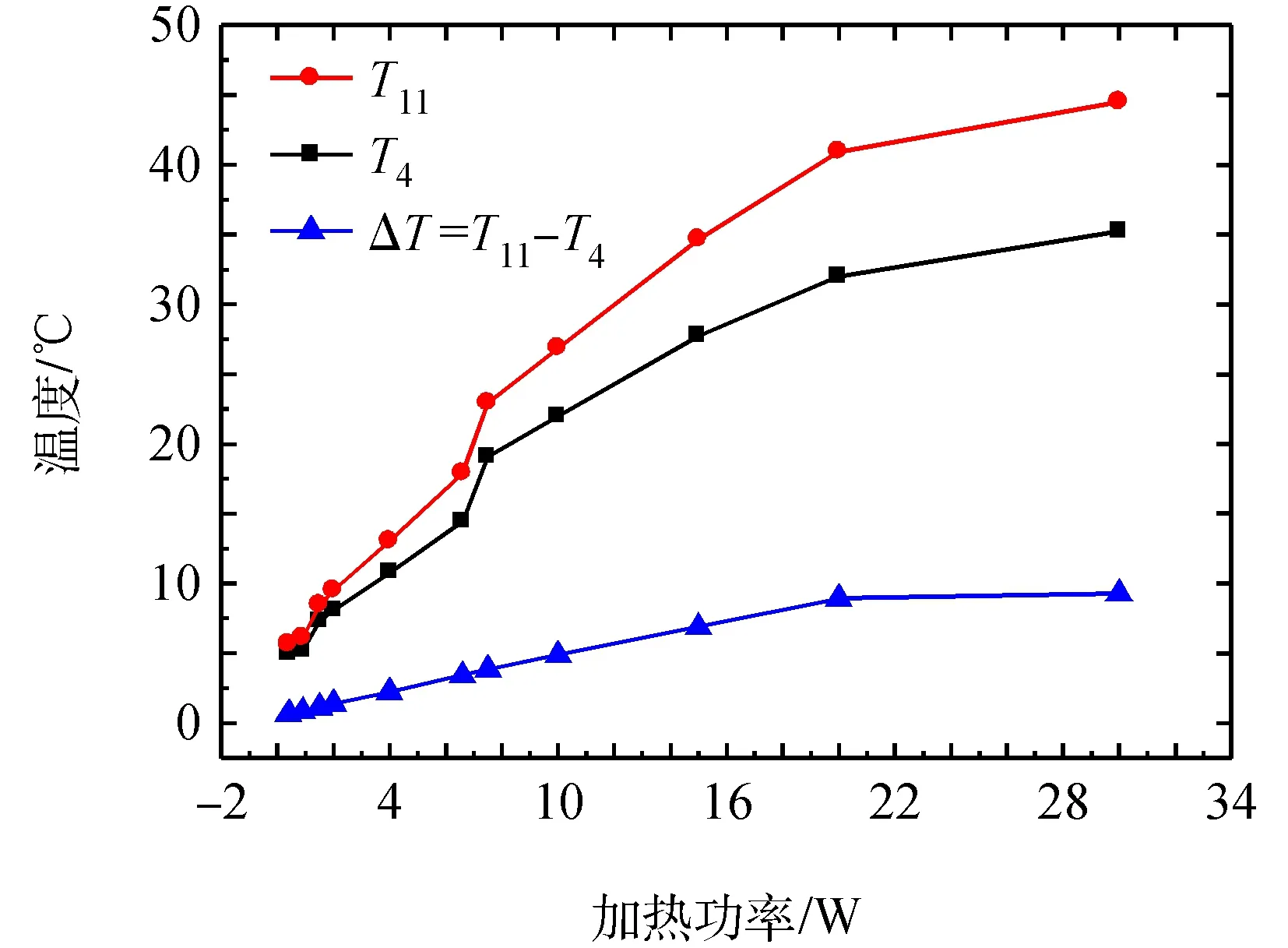
图5 热开关表面测点4和11的温度变化
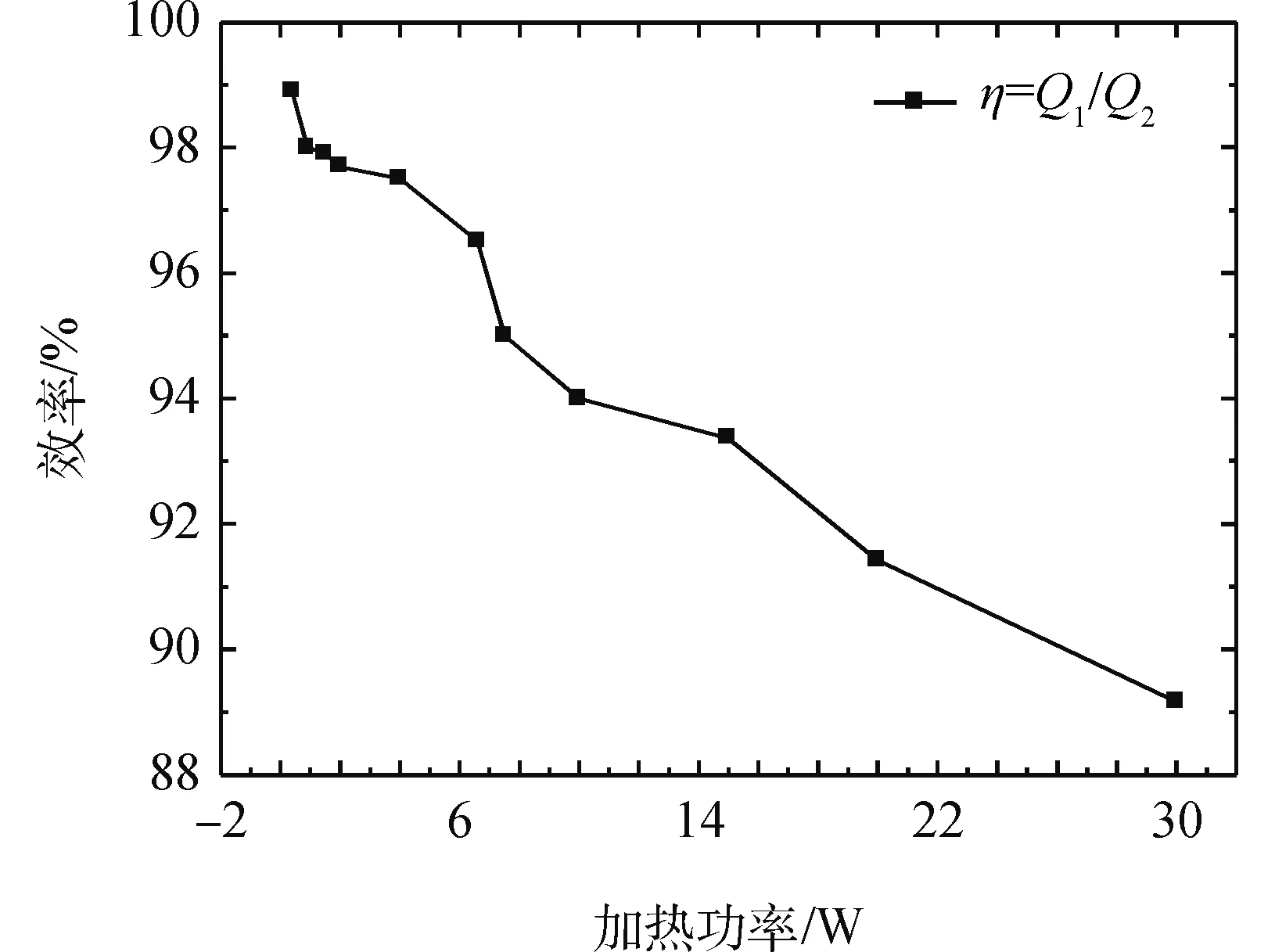
图6 不同热负载下热开关的加热效率
3.3 热特性结果分析
热开关作为一种传导式的主动热控制方法,当设备的发热量较大或者热沉温度变化较大时,相应改变热传导的热阻,从而将被控设备的温度控制在要求的范围之内,其中闭合热阻、断开热阻、开关比是整个热开关的重要特性参数,是能够评定其性能和可靠性的主要依据。热开关在整个工作过程中随着热负载发热量的增大,开关整体传导通路热阻减小,热量由导热环传导到冷端,增加了热排散量,使整个热源的温度升高得以控制。反之,在热源的发热量减小时切断导热通路,通路热阻变大散热量减小,从而使整个装置进入保温状态。
为了测定热开关的特性,模拟热开关实际工作环境,设定不同的加热负载以得到热开关导热环底部各测点的平均温度与热开关整体热阻的变化关系,具体如表2所示。与导热环底部相连的加热片加热功率从0.4W逐渐增大到30W,热开关整体热阻值也随着热负载增大而逐渐减小,整个试验过程中,热开关状态完成了由切断、切断/导通、导通的转化。当热负载为Q=0.4 W时,热电偶测得导热环底部温度为8.323℃,热开关整体热阻达到R=230.46 K/W,此时热开关由于温度无法达到其闭合条件,所以整体处于切断状态。随着热通量增加到Q=10 W时,热开关热阻逐渐减小到R=1.866 4 K/W,导热环随着温度的增加自身也发生线胀,此时热开关导热环端面与冷端端面接近贴合状态,开关还未发生完全导通。当作为模拟被控设备温度的加热片加热功率达到Q=30 W时,热开关随着热源功耗增大发生导通,导通热阻为R=0.302 2 K/W。
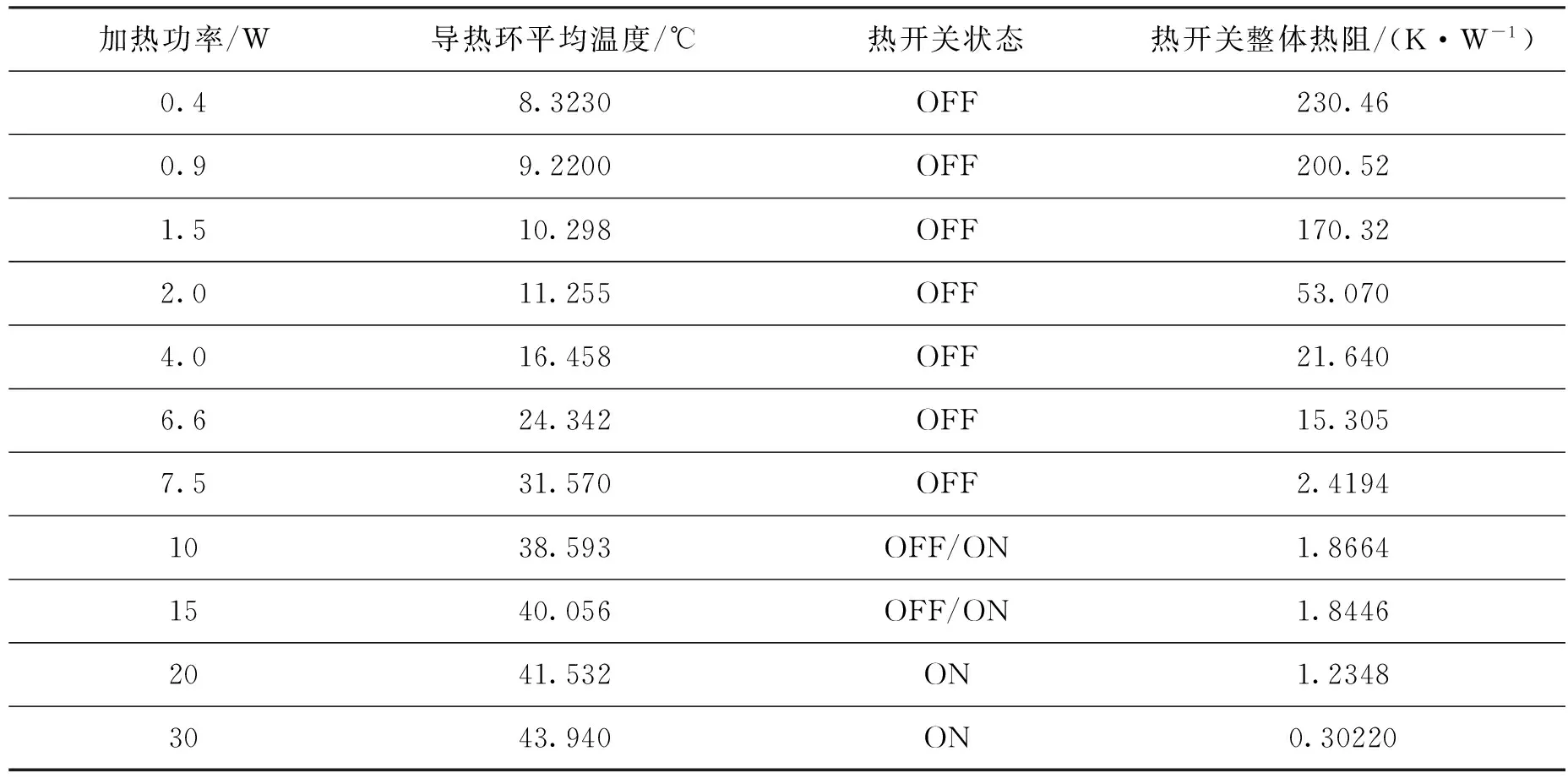
表2 热开关导热环温度及整体热阻
为了进一步完成热开关的性能测试,完成并分析了各功率条件下热开关表面温度状态,图7给出了当热源负载发生变化时,热开关表面各测点温度的变化情况,其中测点(热电偶)1~15分别测定各时刻条件下热开关冷端、导热环表面温度。随着功率负载增大。1~6测温点的温度上升趋势较为缓慢,主要是因为恒温水槽的温度设定为0.5℃,冷端热量通过散热器内部循环水将多余热量散失。7~15测点温度随着导热环受热负载增大也逐渐升高,其中测点1~6和7~15的温度变化相对平稳,而测点6和7之间的温度是非连续平稳的,是由于冷端与导热环之间存在0.02mm的缝隙导致的温度波动不平稳,主要用来分析热开关的断开和导通状态,随着功率增加,热开关整体温度上升,当达到10W和15W时,热开关有比较明显的热启动趋势,当功率达到20W和30W时,开关发生热启动。
试验过程中,衡量热开关特性的一个关键因素就是热阻,热阻能够很好地反映热开关的工作状态,为了能够更好地分析热阻变化情况,在试验测定时主要是通过热源负载,测定不同功率条件下导热环与冷端的温度波动,当热开关功耗达到平衡状态时记录温度值。利用R=ΔT/Q计算在不同功率下的热阻变化情况,图8所示的热开关整体的热阻变化情况,表明了热开关随着温度的变化自身热阻逐渐减小,在温度达到40℃时热阻值基本达到最小,开关达到了导通的状态。
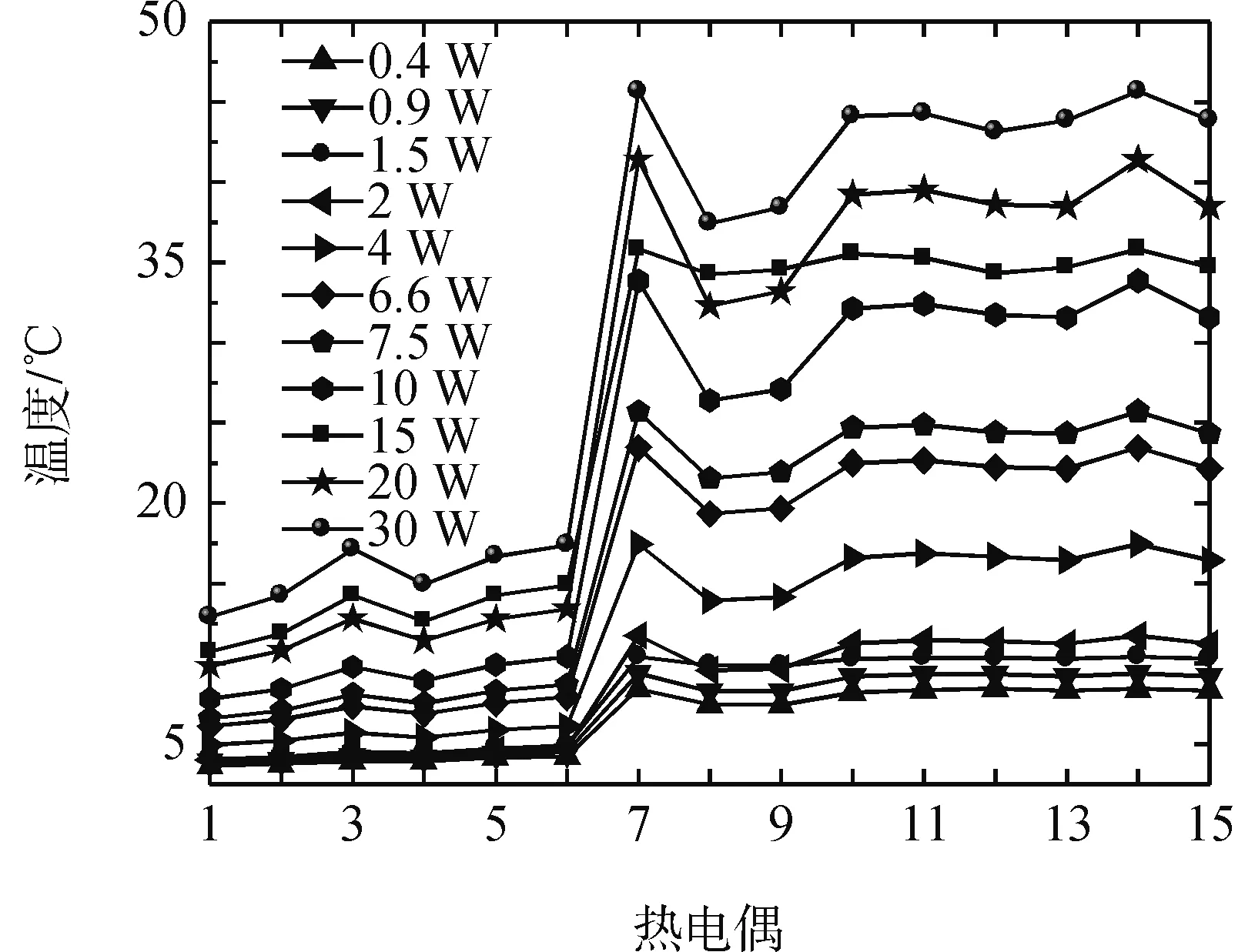
图7 不同热负载下热开关的各测点温度
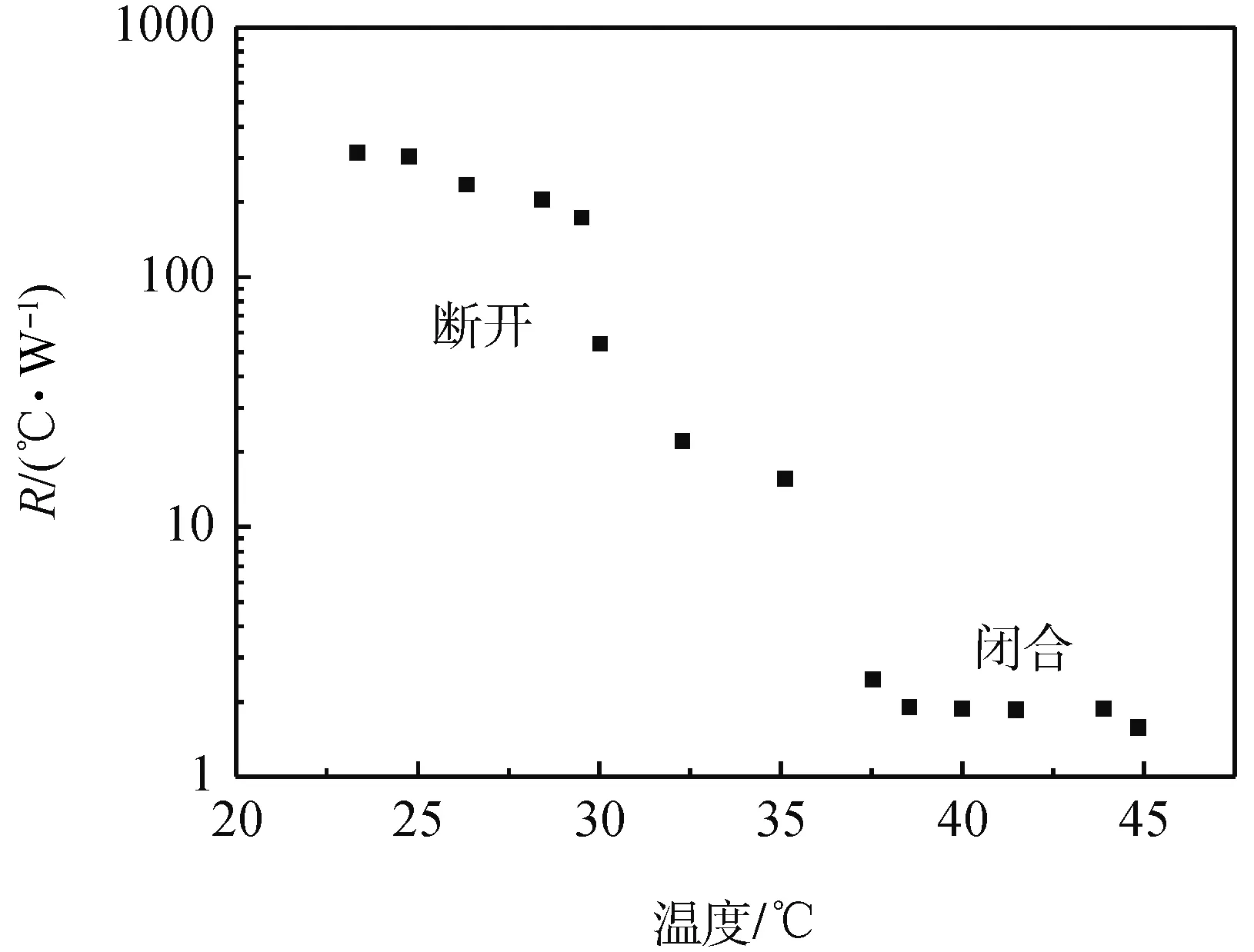
图8 热开关在闭合/断开状态下的热阻
热开关的单次动作过程如图9所示,检测过程中循环水与热源负载同时加载,冷端温度由于在循环水持续作用下温度一直保持在5℃左右,其中导热环热端和中间段的温度随着加热功率的增大平稳上升,当温度达到热开关的闭合温度时,热开关发生热启动导通,此时的闭合温度为40℃左右,导热环上端面与冷端贴合发生导通,导致整个传热路径的热阻减小,热端温度和导热环中间段温度都会相应的下降达到冷端温度范围,大约200min之后热开关断开,热端与冷端的温度都会相应升高,由于在断开状态下的热阻相对较大,热端温度相比冷端升高速率快。通过热开关的单次循环可以看出当热开关在导通状态时,热端温度下降速率比冷端要大,温度下降较快;关断状态下,通路热阻较大,冷端的温度升高速率要低于热端。
如图10所示,针对热开关的可靠性和一致性进行了多次的循环试验,整个试验过程中热开关性能并未发生退化,开关的闭合温度依然能够达到40℃左右,能够良好地维持其热启动特性。通过对所设计热开关的理论分析与试验测试,得到了热开关整体的特性参数,具体的性能参数如表 3所示,其中试验测定热阻与设计热阻存在一定误差是因为忽略了辐射换热的影响以及无法做到完全隔热。最后,理论与试验结果对比表明此装置能够较好地达到预期设计需求。
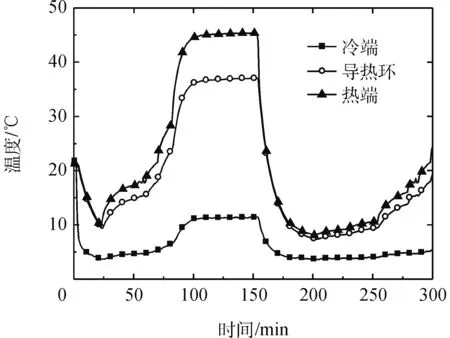
图9 热开关单次循环过程
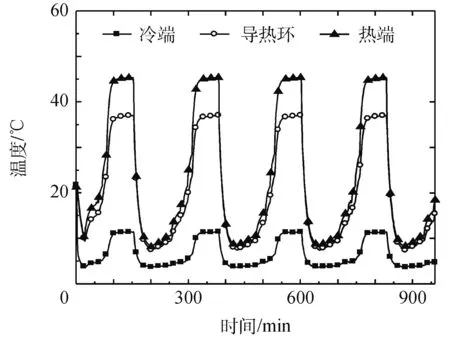
图10 热开关多次循环过程
表3 理论设计与试验结果对比
Tab.3Resultscomparisonoftheoreticaldesignandexperiment

项目闭合温度/℃断开热阻/(K·W-1)闭合热阻/(K·W-1)开关比闭合时间/min设计性能37293.20.2321273-试验性能40230.460.3022762.6150要求性能20~60尽可能大≤1≥1000尽可能短
4 结束语
综上所述,本文针对空间设备的散热需求以及温度控制问题,基于材料的线胀系数不同设计了一种单向膨胀型热开关,它能够根据需要自动切断和导通传热通路,可解决频繁机动或外部环境变化剧烈的航天器热控设计难题,提高空间设备的环境适应性,同时具备结构紧凑、体积小、质量轻、可靠性高等一系列优点。模型分析与试验测试结果表明,热开关能够实现自动闭合与断开动作,并且能够达到预期的闭合温度40℃,当加热负载为30W时热开关的闭合热阻为0.302 2 K/W,开关比为762.6,开关比越大表明性能更好。最后,一系列的循环试验表明,热开关性能在多次试验条件下具有较高的一致性和稳定性。
未来需要对热开关技术进行更进一步的研究来提高它的性能,使其真正应用到空间热控制系统中。
[1]闵桂荣,郭舜. 航天器热控制[M]. 北京:科学出版社,1998:201-204.
MIN GUIRONG,GUO SHUN. Spacecraft thermal control [M]. Beijing:Science Press,1998:201-204.
[2]向艳超,彭方汉,邵兴国. 空间热开关技术的发展现状[C]∥第八届空间热物理会议论文集.南昌,2007.
XIANG YANCHAO,PENG FANGHAN,SHAO XINGGUO. Current status and research development of space heat switch technique [C]∥8th Space Thermo-physics Conference.Nanchang,2007.
[3]郭亮,张旭升,黄勇,等. 空间热开关在航天器热控制中的应用发展[J]. 光学精密工程,2014,22(11):197-210.
GUO LIANG,ZHANG XUSHENG,HUANG YONG,et al. Application and development of space heat switchs in spacecraft thermal control[J]. Optics and Precision Engineer,2014,22(11):197-210.
[4]FERNANDO H. M, MARCIA B H M. Theoretical and experimental studies of a bi-metallic heat switch for space applications [J]. International Journal of Heat and Mass Transfer,2003,46:4573-4586.
[5]SLATER T, GERWEN P V,MASURE E,et al. Thermo-mechanical characteristics of a thermal switch [C]∥The 8th International Conference on Solid-States Sensors and Actuator, and Eurosensors IX,Stock-holm,Sweden,June,1995:25-29.
[6]ZHAO B Z,WANG Q L,LI L K,et al. Practical application of gas-gap thermal switch in conduction cooled superconducting magnet system [J]. IEEE Transactions on Applied Super conductivity,2012,22(3).
[7]M DIPIRRO, P SHIRRON. Heat switches for ADRs [J]. Cryogenics, 2014, 64: 172-176.
[8]ERIC S,KURT L,MIKE P,et al. Wax-actuated heat switch for Mars surface applications [C]∥Space Technology and Application International Forum STAIF,2002:211-213.
[9]B M D,BUGBY C. Development and testing of an advanced cryogenic thermal switch and cryogenic thermal switch test bed [J]. Science Direct Cryogenics, 2004,44:413-420.
[10]王美芬,闫涛,洪国同,等. 微膨胀型低温热开关研究[J]. 低温工程,2006(2):54-57.
WANG M F,YAN T,HONG G T,et al. Experimental research on a practical cryogenic heat switch [J]. Cryogenic,2006(2):54-57.
(编辑:高珍)
Characteristics Analysis of a One-way Micro Expansion Type Heat Switch for Space Application
MA Mingchao1,2GUO Liang1ZHANG Xusheng1WU Qingwen1
(1 Changchun Institute of Optics,Fine Mechanics and physics,Chinese Academy of Science, Changchun 130033)(2 Graduate University of Chinese Academy of Science, Beijing 100049)
In order to improve the temperature control precision of the detector and otherspacecraft and reduce the temperature fluctuation accuracy, a one-way micro expansion type heat switch was designed based on thermal expansion and contraction of metal.The characterization parameter was get to analysis the two-dimensional steady-state thermal modeling.Then, an experimental setup was designed to simulate the actual working conditions of thermal switch,and switch operating status and related performance parameters were measured under different heat power. When the power is up to 0.4 W, disconnected resistance is 230.46 K/W.The power is up to 30 W, the closed thermal resistance of switch is 0.302 2 K/W,and switch ratio is 762.6. The results shown the experiment data are in good agreement with the theoretical calculations.
Thermal control; One-way micro-expansion;Heat switch; Characterization parameters;Temperature change;Spacecraft
中国科学院青年创新促进会资助项目
2015-04-28。收修改稿日期:2015-07-24
10.3780/j.issn.1000-758X.2015.06.006
马明朝 1991年生,2013年毕业于中国石油大学(北京)机械制造及自动化专业,现为中科院长春光机所机械制造及其自动化专业硕士研究生。研究方向为空间遥感器热控制技术。
