真空吸盘式空中翻转机构的设计研究
2015-06-14赵刚花勇
□赵刚 □花勇
江苏食品药品职业技术学院 江苏 淮安 223003
翻转机是一种适应于装配、钢带、卷料等的工业设备,主要用于不同产品的安全、平稳翻转。相比于人工翻转,翻转机可以有效提高安全性,降低工人劳动强度,改善操作方便性,同时提高企业经济效益,降低生产成本。通常,翻转机按照翻转的最大角度一般分为90°和180°,因此翻转角度制约着翻转机在工业生产中的应用。为了增加翻转机的翻转角度,拓展翻转机使用范围,笔者采用CATIA软件设计了一种真空吸盘式空中翻转机构,该机构可以实现工件的上升、下降以及360°的水平和竖直旋转[1]。
1 翻转机构的原理设计
为实现大型工件在原地的空间翻转、上升和下降,必须采用旋转运动和直线运动相结合的运动方式,关键是如何将这两种运动方式可靠地结合起来[2]。本文设计的真空吸盘式空中翻转机构原理如图1所示,工作过程为:电机1(见图3)通过传动轴驱动上转动齿轮,该齿轮与左、右主动齿轮啮合后驱动左、右主动轮作同向旋转运动,左、右主动轮通过皮带分别驱动左、右从动轮作同向转动,从而驱动左、右卷轮作同向转动,左、右卷轮的转动通过升吊链条实现悬吊轮的上升和下降,悬吊轮通过悬吊链条连接下转动轮,最终实现执行机构的上升和下降。当执行机构抓取工件后,电机2(见图4)驱动执行机构转轮轴旋转,该转轮轴驱动执行机构作旋转运动,从而实现工件的360°竖直旋转。上转动齿轮、左主动轮、右主动轮、左从动轮、右从动轮、左卷轮、右卷轮及其它辅助零件均安装在支撑转盘上,由电机3(见图3)驱动,实现执行机构的360°水平旋转。该翻转机构扩大了执行机构在空中的位置及翻转角度范围,其方便性和使用范围将得到提高。
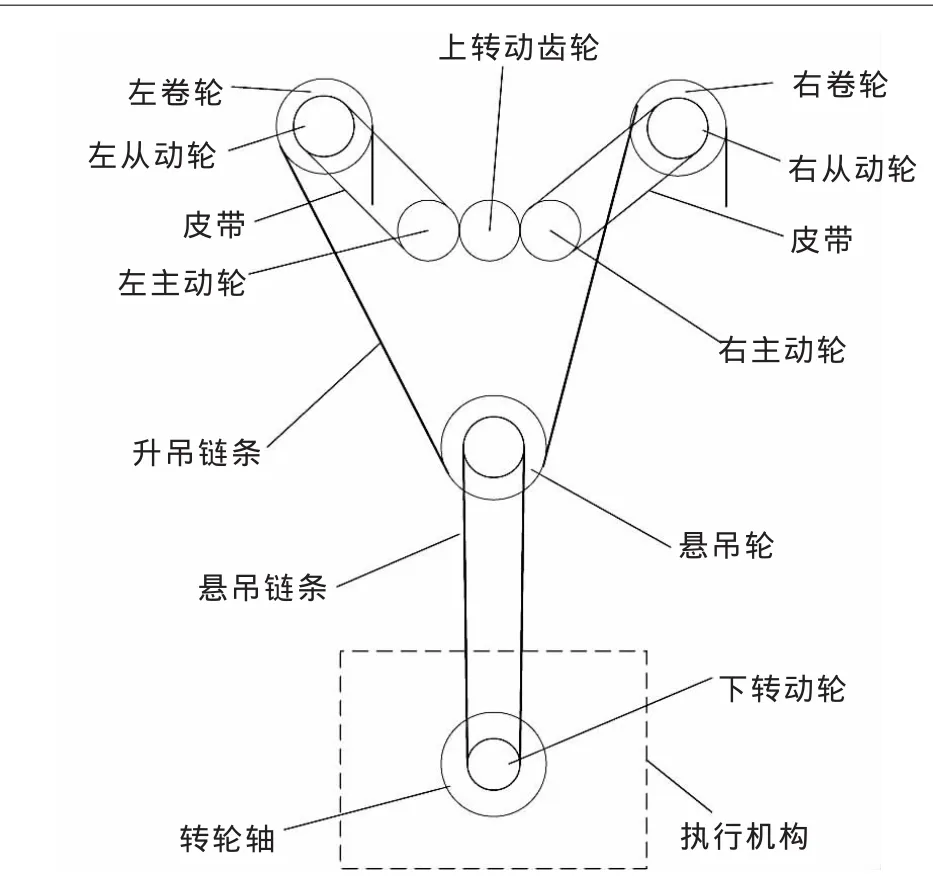
▲图1 翻转机构的原理图
2 总体结构设计
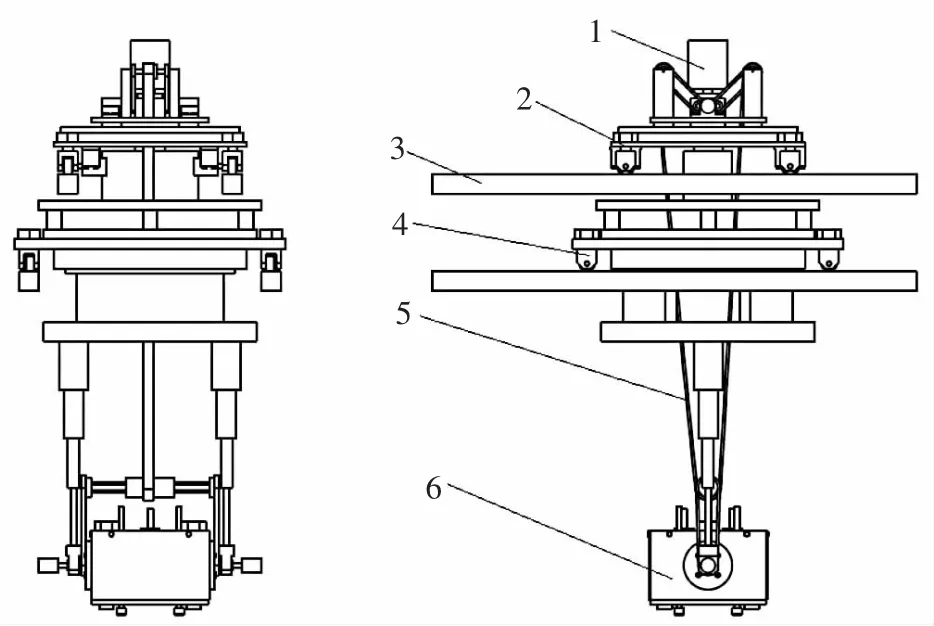
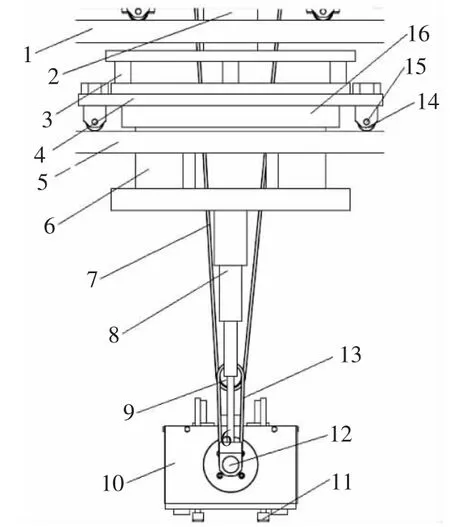
▲图2 空中翻转机构简图
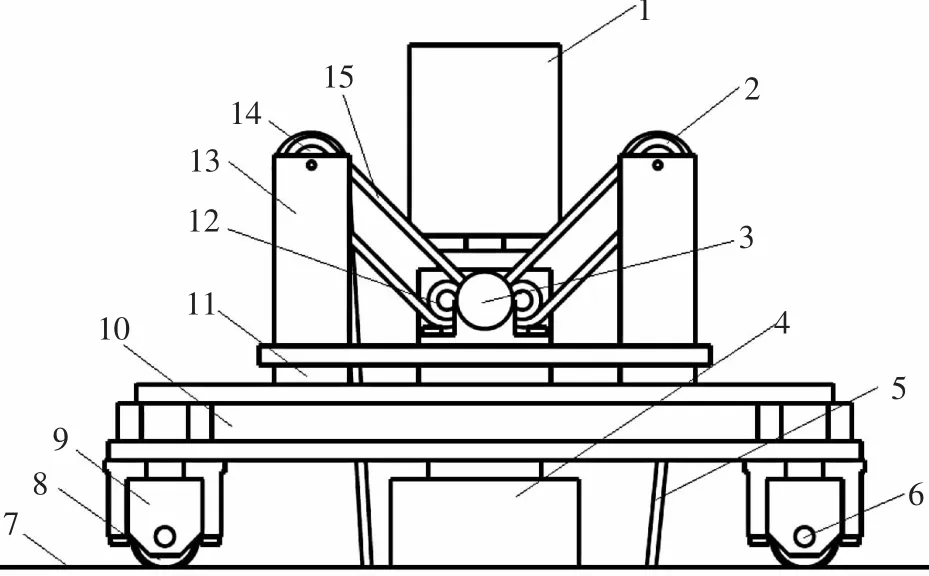
▲图3 动力组件和上支撑驱动组件简图
真空吸盘式空中翻转机构的模型如图2所示,主要由动力组件、上支撑驱动组件、导轨组件、下支撑移动组件、悬吊组件、执行组件及其它辅助零部件组成。动力组件安装在上支撑驱动组件上,上支撑驱动组件连接下支撑移动组件,上支撑驱动组件和下支撑移动组件安装在导轨组件上,悬吊组件安装在动力组件下面,通过升吊链条实现其与动力组件的连接,执行组件通过悬吊链条连接悬吊组件,执行组件和下支撑移动组件通过伸缩连杆实现连接,最终实现整个翻转机构主体部分的组装。
3 动力组件和上支撑驱动组件设计
动力组件(如图3所示)由电机1、卷轮、电机3、主动轮、立柱、从动轮、皮带、升吊链条及其它辅助零部件构成,电机3通过联轴器、变速器将旋转运动传递到上支撑驱动组件中的连接柱,实现连接柱的旋转运动,连接柱同时连接下支撑移动组件的承接板 (见图4),该承接板通过转动环连接转动柱,转动柱通过伸缩连杆连接执行组件,连接柱旋转时将旋转运动传递到承接板,承接板驱动转动环和转动柱同步旋转,转动柱驱动伸缩连杆同步旋转,伸缩连杆连接执行组件,从而实现执行组件的360°水平旋转。
上支撑驱动组件(见图3)由转动板、电机4、水平移动轮、轮柱、上支撑板、连接柱及其它辅助零部件构成,动力组件通过转动板安装在上支撑板上,转动板可以自由旋转,上支撑板由4根轮柱支撑,轮柱安装在水平移动轮上,电机4驱动水平移动轮实现上支撑驱动组件和动力组件的水平移动,连接柱用于连接动力组件、上支撑驱动组件和下支撑移动组件,当上支撑驱动组件水平移动时,驱动动力组件和下支撑移动组件作同向水平移动。
4 其它组件设计
下支撑移动组件如图4所示,主要由承接板、下支撑板、轮柱、水平移动轮、转动柱、转动环及其它零部件构成,轮柱和水平移动轮主要用于支撑承接板、转动环、转动柱、下支撑板及零部件质量,同时将工件和执行组件的质量通过伸缩连杆传递到导轨上。
执行组件(见图4),主要由真空吸盘、电机2、承接组件、助力旋转气缸、下转动轮、转轮轴及其它零部件构成,真空吸盘安装在承接组件上,用来抓取工件,下转动轮通过悬吊链条与悬吊组件连接,转轮轴安装在伸缩连杆的轴承上,下转动轮安装在转轮轴上,可以自由旋转,当电机2通过联轴器、驱动转轮轴旋转时,转轮轴通过花键将旋转运动传递给承接组件,此时助力旋转气缸动作,驱动执行机构旋转,实现360°的翻转。
悬吊组件(见图4),主要由升吊及悬吊链条、悬吊轴、悬吊轮、伸缩连杆及其它零部件构成,主要起连接执行组件、动力组件、上支撑驱动组件、下支撑移动组件以及承接工件质量的作用。悬吊轮通过悬吊链条将执行组件和工件的一部分质量传递给悬吊轴,悬吊轴通过升吊链条将执行组件、工件及悬吊组件一部分质量通过升吊链条传递给动力组件中的左、右卷轮,左、右卷轮通过立柱将这一部分质量最终传递给导轨。导轨组件由导轨、支撑架及其它零部件组成,起支撑翻转机构及工件质量的作用。
▲图4 下支撑移动、悬吊和执行组件简图
5 总结
当前,翻转机的翻转角度多数为90°和180°,本文设计的真空吸盘式空中翻转机构可以实现工件的上升和下降、水平移动、360°水平和竖直旋转,可以用于工件的拆卸、搬运、装配等。但是这种真空吸盘式空中翻转机构的旋转精度、控制系统以及可靠性等方面制约其在工艺过程中的应用,对其控制系统、电气系统、气动系统、传感器选择、结构优化、定位精度、翻转效率等方面需要作进一步的研究。总之,本文设计的真空吸盘式空中翻转机构可以为此类翻转机的设计提供一定的参考依据和启发。
[1]张瑞,王玉宽,王春英,等.空中翻转机构的设计及应用[J].起重运输机械,2009(12):17-19.
[2]金鑫,张悦,张轲.双关节低位空间翻转机构的研制[J].造船技术,2004(5):38-40,33.