基于ADAMS的汽车操纵稳定性仿真分析
2015-06-12尹汉琪黄秀玲唐亚丽沈黎明
□ 尹汉琪 □ 黄秀玲 □ 唐亚丽 □ 沈黎明
上海大学 机电工程与自动化学院 上海 200072
随着世界各地经济的不断发展与汽车技术的不断改善,汽车的数量越来越多,频繁发生的交通事故,使道路交通安全成为公众关注的焦点。安全性问题成为摆在汽车专家面前的重要问题,而对汽车行驶安全影响最大的因素是汽车的操纵稳定性[1]。
本文将凯越HRV型轿车作为参考对象,采用虚拟样机技术,利用机械系统仿真软件ADAMS中的CAR模块建立整车仿真模型,目的是探究该款轿车整车的操纵稳定性,以给实际生产设计提供借鉴,从而缩短汽车的研发周期[2]。
1 整车模型的建立
实验室所采用的凯越HRV的主要特征参数见表1,用ADAMS/CAR从上到下建模,建模顺序为模板→子系统→总成。由于整车系统比较复杂,在ADAMS/CAR中建立仿真模型时,可以将车辆分成几个子系统,先建立各个子系统模型,再建立各个子系统间的通信端口命令,最后装配成整车仿真模型,如图1所示。
主要结构为:前悬架采用麦弗逊式独立悬架[3],齿轮齿条式转向机构,后悬架采用多连杆式独立后悬架,制动系简化为一制动力矩发生器,采用了ADAMS/CAR数据库中内置发动机模块,225/45 R18的轮胎。
2 整车操纵稳定性试验仿真与分析
目前,各国采用的整车操纵稳定性试验评价方法较多,本文主要通过已建好的整车模型进行蛇形试验、转向盘角阶跃输入、转向盘角脉冲输入、稳态回转特性的试验研究。

▲图1 车身模型图
2.1 蛇形试验仿真
蛇行试验是一种典型的行驶工况性能试验,它可以评价汽车的随动性、收敛性、方向操纵稳定性等。实践中如果采用实车进行测试,则具有很大的危险性,因此,可以采用虚拟样机对轿车进行仿真蛇行试验。

表1 实验室凯越HRV型主要特征参数
根据国家标准GB/T 6323.1-1994[4]的试验方法,蛇行试验仿真需要进行标桩设置,对于中小型汽车L=30 m。仿真时让汽车以65 km/h的车速匀速直线行驶,然后蛇行通过试验路段,汽车在行驶时不能碰到标桩。汽车行驶轨迹如图2虚线所示,整车处于满载状态。
图3~图6分别是当车速为50 km/h、65 km/h及70 km/h时方向盘转角、侧向加速度、横摆角速度、车身侧倾角随时间变化的响应曲线。
由以上曲线图可知,在车速相对较低的情况下,汽车具有较好躲避障碍物的性能。随着车速的提高,汽车的横摆角速度、侧向加速度、车身侧倾角等响应时间比低速时要明显短很多,同时,响应时间虽然缩短了,但是各参数的峰值明显变大,车辆回避障碍物的性能有所降低。
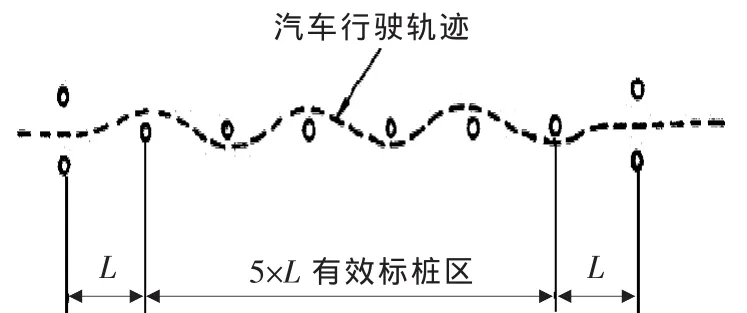
▲图2 蛇行试验轨迹曲线

▲图3 不同车速时方向盘转角随时间的变化曲线

▲图5 不同车速时横摆角速度随时间的变化曲线

▲图4 不同车速时侧向加速度随时间的变化曲线
2.2 方向盘角阶跃输入试验仿真
根据国标 GB/T6323.2-94[5]规定的试验方法,首先以初始速度为90 km/h的车速进行仿真,挡位设为5挡,初始方向盘转角为0°,方向盘终止转角为60°,仿真持续时间为20 s,在3 s时给方向盘一个阶跃输入并之后保持方向盘转角不变,记录仿真过程中的汽车运动响应。
2.2.1 方向盘转角仿真
由图7可知,前3 s内方向盘转角均无变化,从第3 s开始的瞬间,由于给其一个阶跃输入,方向盘转角瞬间由0°变化到60°,起阶时间大约是0.2 s,并最终稳定在起初设置的60°转角值,车辆由起初的等速直线行驶经短暂时间后进入等速圆周行驶,这也说明车速对于方向盘转角几乎没有影响。
2.2.2 侧向加速度仿真
本系统[1]根据气调库内的果蔬贮藏环境要求,设计了一种以STM32F103rct6为微处理器,通过空气温湿度传感器、氧气传感器、二氧化碳传感器对气调库内的环境状态参数进行采集,并将数据上传至上位机[2]监测平台,便于工作人员实时查看处理,实现对果蔬气调库的实时监测,维持果蔬最理想的贮藏环境,保质贮存期可达2~4个月。
图8是当车速分别为80 km/h、100 km/h和120 km/h时汽车侧向加速度随时间变化的响应曲线图。

▲图7 方向盘转角随时间变化曲线

▲图6 不同车速时车身侧倾角随时间的变化曲线
由图8可看出,当车速为80 km/h时,汽车能很快进入并达到稳态,侧向加速度稳态值大约为0.5 m/s2,达到稳态所需的时间较短;随着车速的进一步提高,汽车达到稳态所需的时间、稳态值均增大,过渡过程稳定,说明该车的操纵稳定性在时速低于120 km/h时表现十分良好。
2.2.3 侧倾角仿真
由图9可知,当车速为80 km/h时,汽车很快就能达到稳态,车身侧倾角稳态值约为1.7°;当车速提高到100 km/h时,汽车达到稳态所需要的时间及稳态值均有所增加,但过渡过程仍十分稳定;随着车速的进一步提高,当车速达到120 km/h时,汽车需要经过较长的时间才能达到稳态,但过渡过程仍较稳定,说明该车的汽车操纵稳定性较好。
2.2.4 横摆角速度仿真

▲图8 侧向加速度随时间变化曲线

▲图9 侧倾角随时间变化曲线

▲图1 0 横摆角速度随时间变化曲线

▲图1 1 方向盘转角随时间变化曲线

▲图1 2 横摆角速度随时间变化曲线

▲图1 3 侧倾角随时间变化曲线
由图10可知,当车速为80 km/h时,汽车的横摆角速度很快达到稳态,稳态横摆角速度值大约为12.5(°)/s,达到稳态所需时间约为1 s,此时横摆角速度的超调量约为44%;随着车速的进一步提高,达到稳态所需要的时间、超调量均进一步增大,过渡过程也较稳定。
2.3 方向盘转角脉冲输入试验仿真
角脉冲试验主要考察整车受到外界干扰后,恢复到稳态前的一段时间内表现出来的特性,它通过幅频特性和相频特性图来分析整车瞬态响应的能力。根据GB/T6323.3-1994[6]规定设置方向盘角脉冲输入仿真工况,整车模型的车速按该车最高车速的70%并取为10的整数倍计算。本文分别取车速为80 km/h、100 km/h、120 km/h作直线行驶,然后给转向盘一个三角脉冲转角输入,试验时向左(或向右)转动转向盘,并迅速转回原处(允许及时修正)保持不动,直至汽车恢复到直线行驶位置,记录全过程。转向盘转角输入脉宽为0.3 s,方向盘的转角幅值为120°,脉冲开始输入的时间为5 s,之后方向盘回转到原位并保持不动,直到仿真结束,见图11。

▲图1 4 侧向加速度随时间变化曲线
2.4 稳态回转试验仿真
稳态回转特性仿真试验是当转向盘转角输入达到稳定时对汽车行驶状态的稳态横摆响应的测试,有理论指出,稳态回转特性决定了汽车作为一个动力学系统在转向输入下是否稳定的充分条件。当汽车的车速V达到或大于临界车速Vcr时,就会出现过多转向,这时即使受到轻微的转向干扰,汽车也会出现不稳定运动的现象。现代汽车在设计阶段,首先都要对其模型进行模拟计算分析,得到该车模型的稳态转向特性,在产品制造出来以后,还要进行实况实车的稳态转向特性试验的测定,由此可见其在操纵稳定性中的重要意义。

▲图1 5 稳态转向仿真实验的参数设置

▲图1 6 方向盘转角随时间变化的曲线
本次仿真试验是根据GB/T 6323.6-1994的规定进行的,采用的是稳态回转试验中的定半径转弯法。在本次稳态回转仿真试验中,设置整车模型最低车速为20 km/h,以半径为30 m的圆形轨迹作为试验路径,使整车模型沿该圆形轨迹行驶,并逐渐增大车速,得到不同的侧向加速度值,从而进一步评价整车的不足转向或过多转向。在模型进入行驶路径并达到稳定状态后,开始记录并在10 s内保持一定油门和方向盘位置不动,完成之后停止记录。本次仿真试验前具体初始参数设置如图15所示。
由图16~图18可知:转角随时间增加呈上升趋势,侧向加速度随时间变化而增大,整车前后轮侧偏角之差基本维持在0附近,呈现轻微适度的不足转向。
3 总结
以凯越HRV型车为研究对象,利用虚拟样机软件ADAMS中CAR模块,建立了整车仿真模型,并对所建的模型进行仿真,同时,利用ADAMS后处理模块的仿真结果进行了研究分析,最后深入讨论了影响操纵稳定性的几个因素,结论如下。

▲图1 7 侧向加速度随时间变化的曲线
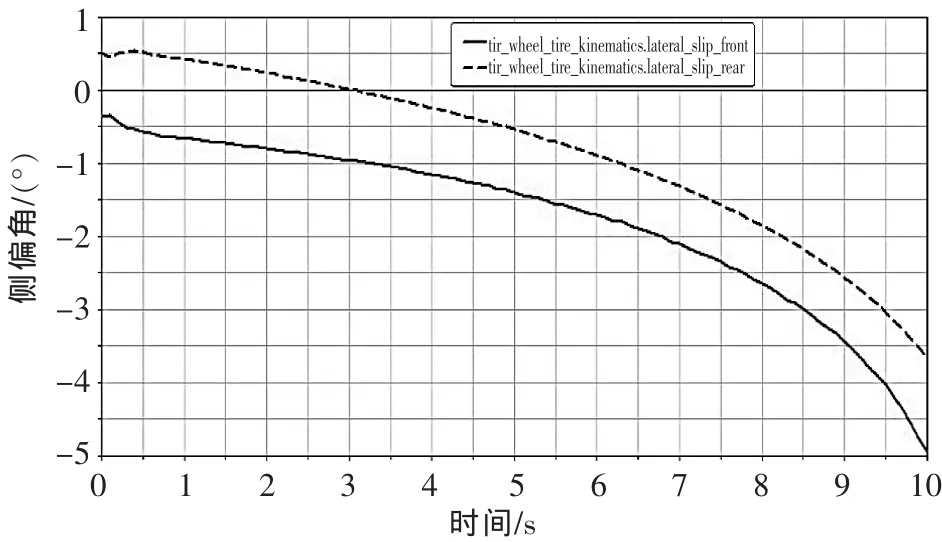
▲图1 8 前后轮侧偏角随时间变化的曲线
(1)建立了凯越HRV车前悬架系统、后悬架系统、轮胎系统、转向系统、制动系统等子系统以及整车仿真模型。
(2)按照操纵稳定性试验方法GB/T 6323-1994的规定,对该整车模型进行了仿真试验分析,结果表明:该车的整车操纵稳定性性能一般。
(3)利用ADAMS/CAR软件试验平台能够很好的满足整车虚拟样机的建模仿真和试验要求,减少了试验成本和试验周期,丰富了汽车性能分析的手段。
[1] 余志生.汽车理论(第 5版)[M].北京:机械工业出版社,2009.
[2] 陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[3] 《汽车工程手册》编辑委员会.汽车工程手册·设计篇[M].北京:人民交通出版社,2001.
[4] 程源,张翼,李鹏,等.基于ADAMS的汽车操纵稳定性仿真试验研究[J].公路与汽运,2010,27(2):7-9.
[5] 陈蓉.转向盘转角阶跃输入下汽车操纵稳定性仿真分析[D].长春:吉林大学,2006.
[6] 田文彬.基于ADAMS/CAR的汽车操稳性动力学仿真[D].福州:福建工程学院,2011.
