一种管道密闭性双车检测定位方法
2015-06-12李宗睿刘嘉博孙东辉王喜斌
李宗睿 侯 艳 刘嘉博 孙东辉 王喜斌
(北华航天工业学院电子与控制工程学院,河北 廊坊 065000)
一种管道密闭性双车检测定位方法
李宗睿 侯 艳 刘嘉博 孙东辉 王喜斌
(北华航天工业学院电子与控制工程学院,河北 廊坊 065000)
为解决流体输送管道投产前的密闭性检测问题,提出了一种基于无线通信技术和双检测定位方法的解决方案。该方案利用无线通信模块控制管道中两台检测车的行进动作,同时利用搭载在检测车上的气压检测模块完成管道中密封性的测试。当出现气压值突变时,检测车进行实时定位并通过无线方式将检测结果发送至管道一端的终端模块进行显示和记录。试验表明,该方案定位准确,且可实时显示检测结果,在流体输送管道密闭性检测过程中具有很高的应用价值。
双车检测 无线通信 实时定位 漏检车 定位车
0 引言
管道输送是目前工业领域较为简单、直接的流体输送方式,因其成本低廉、维护简单、安全性高、供给稳定等特点,被广泛应用在各种工业生产过程中。而密闭性良好的管道是流体正常输送的前提条件,否则会影响生产、污染环境,甚至威胁人类生命[1]。但是在生产过程中,管道有可能因为工艺问题出现密闭性不好的问题,特别是长距离管道需要经过焊接以延长其长度,而焊接过程更容易使接口处出现漏洞或细缝[2]。所以在管道铺设完毕后,必须经过一系列的检测,只有密闭性达到要求的管道才能投入到生产中。传统的管道密封性检测常用的方法是通过将水或气体注入管道,然后通过各种间接测漏方式对泄漏点进行查找。常用的方法包括压力梯度法、次声波检测法、负压波检测法等[3-6]。但以上传统检测方法都由于各种原因限制,应用较少。针对以上问题,本文重点研究了一种新型双车检测定位方法,利用无线通信技术完成管道裂纹的检测与定位,并将检测结果实时发送到系统终端,辅助管理人员方便精确地找到管道泄漏点。
1 系统组成
整体双车漏检系统由漏检车、定位车以及终端单元组成,具体如图1所示。
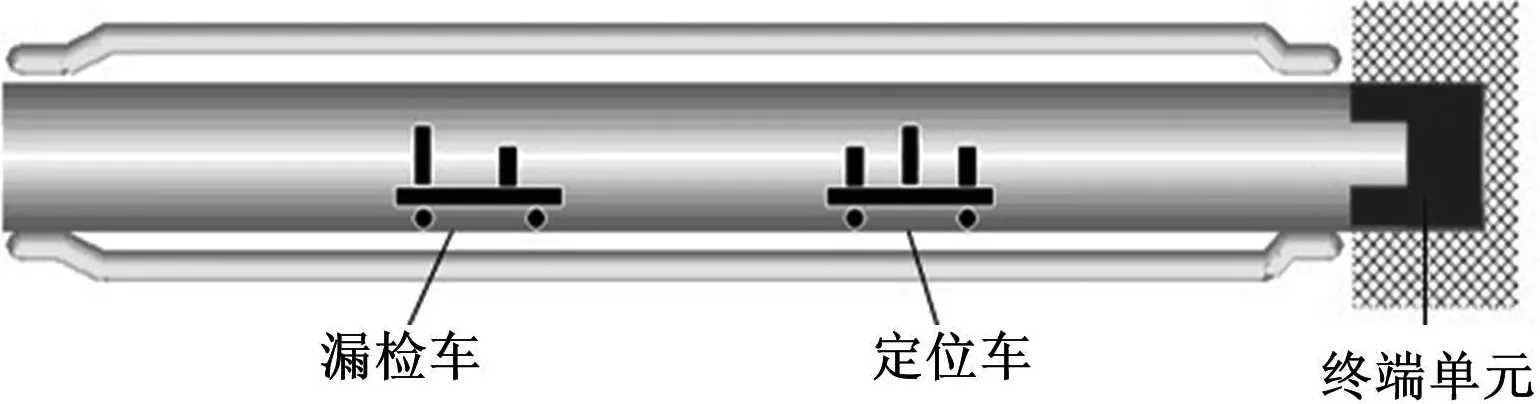
图1 双车漏检定位系统组成示意图Fig.1 Schematic diagram of the composition of two-vehicle leak inspection and positioning system
1.1 漏检车组成及工作原理
漏检车完成对管道密封性的初步检测,并与定位车完成无线通信,实现双车行进控制,其内部组成如图2所示。在工作过程中,漏检车自带气压传感器检测管道内部气体绝对压强。如压强未有明显变化,则小车继续向前行进;如漏检车检测到气压变化明显,有泄漏可能时,则停止前行,并通过无线通信模块告知后方定位车降低前行速度,详细检测泄漏点位置。
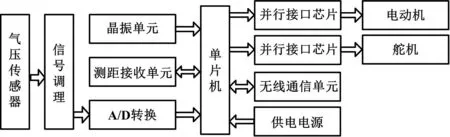
图2 漏检车组成框图Fig.2 Block diagram of the composition of leak inspection vehicle
1.2 定位车组成及工作原理
定位车完成与漏检车的行进状态通信,并通过气压传感器进行泄漏点二次检测,准确定位漏点位置;同时,还可将漏电信息以无线通信方式传送至管道终端。定位车内部组成如图3所示。
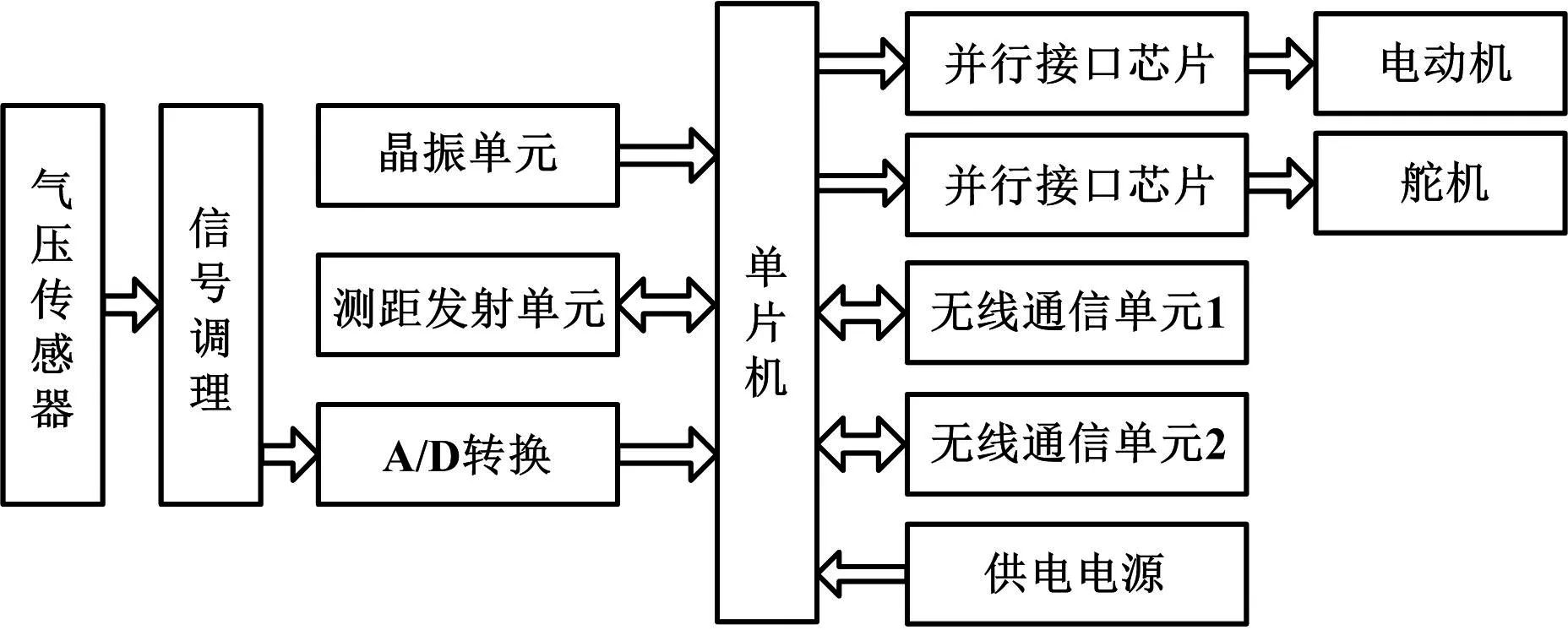
图3 定位车组成框图Fig.3 Block diagram of the composition of positioning vehicle
在工作过程中,定位车接收到漏检车的行进控制信号后,降低车速进行气压精确检测,如果接触到漏检车后仍未发现压强明显变化点,则认为漏检车进行了一次误测试,则双车重新启动前进。此过程中漏检车先启动,定位车利用车体前部的测距装置确定双车距离满足要求,随后启动前进。如果测试到管线某点压强变化最为明显,则确认该位置为疑似泄漏点,定位车上的无线通信单元在微控制器作用下发出一个标志信息,以通知终端单元此时检测到一个漏点。
1.3 终端单元组成及工作原理
终端单元的作用是接收到所述定位车发送的信号后,通过定位车运行速度以及运行时间计算出该漏点位置,并通过显示器将此位置信息进行显示。终端单元内部组成如图4所示。

图4 终端单元组成框图Fig.4 Block diagram of the composition of terminal unit
2 系统硬件设计
双车漏检定位系统以单片机为控制、计算核心,以无线通信方式完成双车行进控制信号传输,通过终端单元显示漏电检测位置结果。系统所采用的硬件单元如下所述。
① 单片机模块
系统漏检车、定位车以及终端单元均以MSP430F1232单片机为控制核心。该单片机是由TI公司推出的功能强大的超低功耗16位混合信号处理器,其以低功耗、强大的处理能力、丰富的片上外围模块、方便高效的开发方式等特点,被广泛应用于便携式仪表、智能传感器、实用检测仪器、电机控制等领域。
② 无线通信及测距收发模块
采用NRF24L01收发一体无线传输模块,负责完成漏检车、定位车以及终端单元之间的数据通信,同时还可完成漏检车与定位车之间的测距任务。该模块可采用与单片机相同的3.3 V电源直接供电,在2.4 Mbit/s的传输速率下保证低功耗的特点,适用于电池供电的单片机应用系统。
③ 电机模块
采用ASLONG-JGB37-520小功率直流电机,完成漏检车和定位车的动力提供。
④ 舵机模块
采用辉盛MG996R大扭力标准舵机,负责完成漏检车和定位车的转向驱动,使得双车在管道中的行进更加稳定。
⑤ 电源模块
采用MP2303ADN电源管理芯片,可将车载12 V电源降压为系统所需的3.3 V电源,为单片机模块及无线通信模块供电。
通过以上模块的搭建,整个系统具备性价比高、功耗低等特点,适用于长时间野外环境应用。
3 系统软件设计
系统软件包括漏检车控制程序、定位车控制程序机终端单元控制程序三部分。
3.1 漏检车工作流程
测试过程中依次将漏检车及定位车放入测试管道并保持管道密封。漏检车以预定速度开始向前行进,并接收定位车发送的测距信号。当测距信息满足系统预定要求后,利用无线通信模块发送定位车前进命令。在前进过程中,漏检车上的气压传感器进行快速检测,实时感应管道内当前位置气压信息,正常状态下管道内气压呈缓慢线性变化,说明当前位置管道密封性良好。若出现气压突变,说明该位置存在泄漏可能,此时漏检车停车,并发送“精确检测”控制命令给定位车,命令定位车降低车速进行仔细检测。漏检车工作流程图如图5所示。

图5 漏检车工作流程图Fig.5 Work process of the leak inspection vehicle
3.2 定位车工作流程
定位车工作流程图如图6所示。
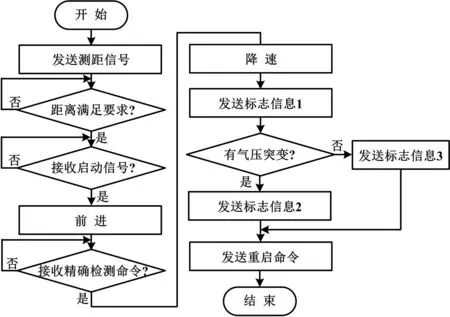
图6 定位车工作流程图Fig.6 Work process of the positioning vehicle
定位车进入管道后不断发射测距信号。当测距满足要求并接收到漏检车发送的前进命令后,定位车按照预定速度前进,前进速度与漏检车相同。当定位车接收到漏检车发送的“精确检测”控制命令后,降低前进速度并通过无线通信模块2向终端单元发送标志信息1,利用其自带气压传感器仔细检测气压变化。如果在某点检测到气压突变,则立即停车并通过无线通信模块2向终端单元发送标志信息2,表示该位置为漏点位置。如果定位车与漏检车相遇后,仍未检测到漏点位置,则认为漏检车进行了一次误检测,发送重启命令,双车重新启动向前行进并在定位车启动后向终端单元发送标志信息3。
3.3 终端单元工作流程
终端单元利用无线通信模块与定位车进行通信,并记录定位车行进速度及行进时间。当终端单元接收到标志信息1时,表示定位车当前以低速前进。当终端单元接收到标志信息2时,表示定位车确定漏点位置,终端单元的微处理器将按照公式S=v1t1+v2t2计算出漏点与管道入口的距离值,并通过显示器显示该位置信息。当终端单元接收到标志信息3时,表示定位车重新启动并按照正常速度前进。终端单元工作流程图如图7所示。
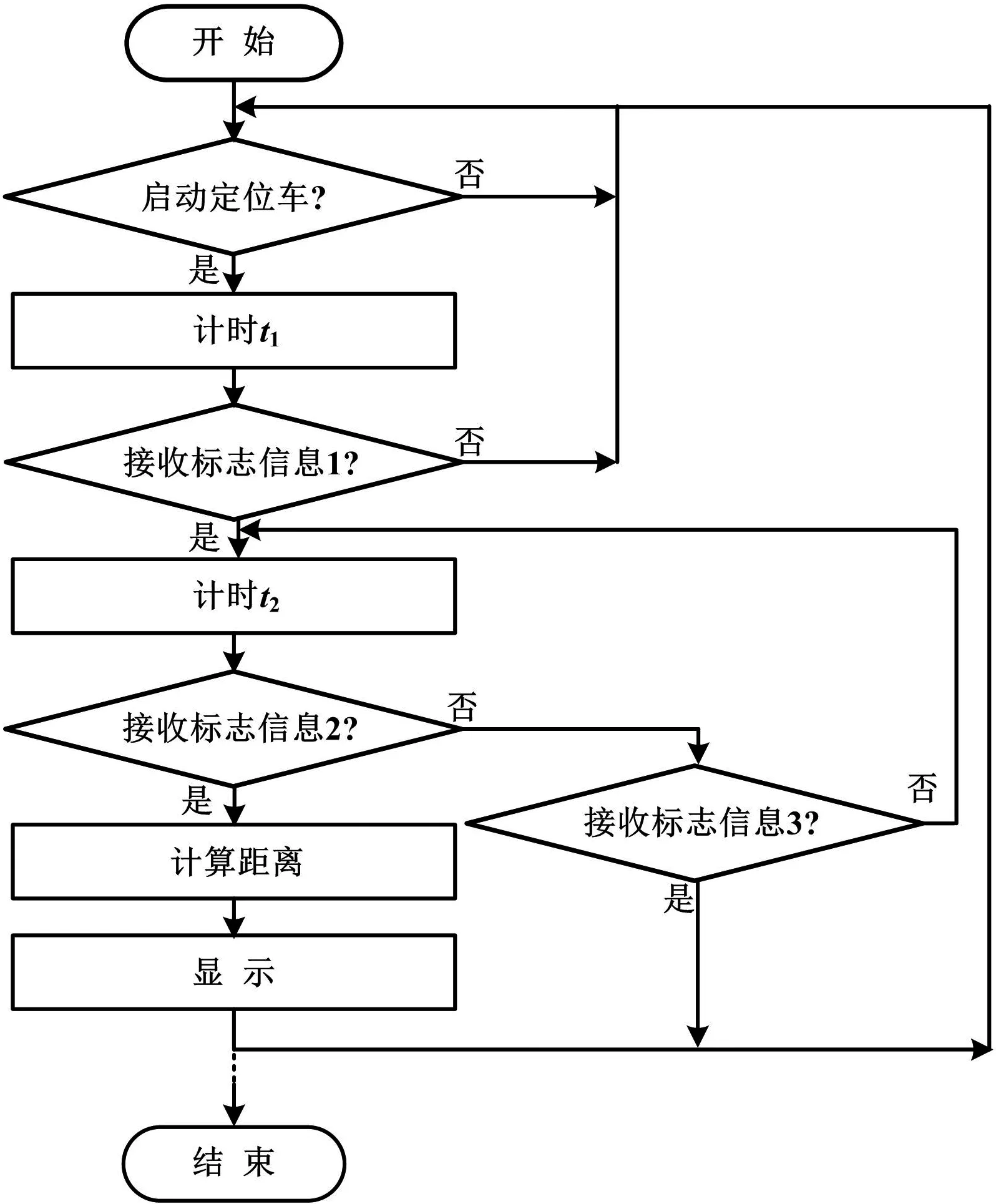
图7 终端单元工作流程图Fig.7 Work process of the terminal unit
4 结束语
综上所述,本文所述的一种管道密封性双车定位检测方法,其最大优势就在于其利用高性价比传感器及单片机完成对管道密封性的检测。同时,双车检测方法可以使定位更加直接而且准确,可以将疑似泄漏点的位置直观地显示在显示器上而不需要进行复杂的数据处理,从而提高了管道检测的效率。
[1] 汪磊,谈图,曹振松,等.便携式天然气泄漏遥感探测的研究[J].光谱学与光谱分析,2010,30(8):2192-2195.
[2] 冯继忠,孙明森,张思,等.长输管道检测技术探讨[J].长江大学学报,2012,9(9):70-72.
[3] 杜永军,时婷婷,郭凤,等.基于RFID输油管道泄漏检测技术的研究与探讨[J].科学技术与工程,2010,10(9):2155-2159.
[4] 龙媛媛,柳言国,杨为刚,等.埋地管道泄漏检测技术的综合应用[J].石油化工腐蚀与防护,2009,26(2):47-49.
[5] 许胜利,刘桂香,赵翔,等.机动输油管线泄露监测技术[J].后勤工程学院学报,2012,28(3):44-50.
[6] 胡炎兴.输油管线泄露监测技术研究[J].管道技术与设备,2011(3):19-21.
Two-vehicle Leak Inspection and Positioning Method for Airtightness of Pipeline
In order to solve the problems in airtightness inspection for pre-production of fluid transportation pipelines, the solution based on wireless communication technology and twofold inspection plus positioning method is proposed. With this method, the movements of two inspection vehicles are controlled by wireless communication module, and the test of airtightness in pipeline is conducted by using the air pressure detection module equipped on the inspection vehicles. When abrupt change of air pressure occurs, positioning is accomplished in real time by the inspection vehicle, and the result is sent to the terminal module at the end of the pipeline for display and record. The tests show that the method is precise in positioning and the inspection result can be displayed in real time; it possesses higher applicable value in airtightness inspection process for fluid transportation pipelines.
Two-vehicle inspection Wireless communication Real-time positioning Leak inspection vehicle Positioning vehicle
北华航天工业学院青年基金资助项目(编号:KY-2014-18);
北华航天工业学院重点基金资助项目(编号:ZD-2014-02)。
李宗睿(1982-),男,2010年毕业于河北工业大学电子与通信工程专业,获硕士学位,讲师;主要从事信号智能检测及智能处理领域的研究。
TP216
A
10.16086/j.cnki.issn1000-0380.201506022
修改稿收到日期:2015-01-15。