转矩转速传感器静态标定系统开发
2015-06-12高辉松王珊珊朱思洪
高辉松 王珊珊 朱思洪
(南京农业大学工学院江苏省高校智能化农业装备重点试验室1,江苏 南京 210031;南京市第十四中学2,江苏 南京 210031)
转矩转速传感器静态标定系统开发
高辉松1王珊珊2朱思洪1
(南京农业大学工学院江苏省高校智能化农业装备重点试验室1,江苏 南京 210031;南京市第十四中学2,江苏 南京 210031)
为了提高传感器测量准确度,开发了转矩转速传感器静态标定系统。该标定系统由转矩转速传感器、校正臂、砝码以及数据采集系统组成。根据力矩平衡原理,传感器一端固定,另一端由砝码通过校正臂给传感器加载。基于LabVIEW平台开发了数据采集系统,并根据传感器工作原理,开发了相位差及频率测量模块。以JC2C型传感器为试验对象,进行了静态标定试验研究。试验结果表明,所开发的静态标定系统运行稳定、开发成本低,达到标定要求。
转矩转速传感器 LabVIEW 静态标定 数据采集 数据处理
0 引言
转矩转速传感器安装于动力传递路线上,所测转矩和转速是判定动力驱动系统性能的重要参数,在动力系统检测试验台上具有重要地位。为了保证测试数据的准确性,需要定期对转矩转速传感器的静态特性进行标定。传统的标定方法需要使用转矩转速传感器专用标定仪器,成本高、功能单一[1-2]。由于转矩转速传感器的标定是经常性的工作,处理的数据多,因此需要一种简单易操作且精度高的标定方法。
近年来,围绕传感器标定关键技术,合肥工业大学、中国矿业大学、南京航空航天大学、西安交通大学、Middle East Technical University等国内外高校院所开展了多方面的研究[3-8]。
但由于传感器的多样性,以上研究方法及技术缺少通用性。为了保证转矩转速传感器经常性标定的准确性及稳定性,本文根据转矩转速传感器工作原理,开发了一种基于LabVIEW软件平台的静态标定系统。通过试验应用表明,该转矩转速传感器静态标定系统精度高、稳定性好,能够满足传感器静态标定的各种功能需求。
1 转矩转速传感器工作原理
图1所示为磁电式转矩转速传感器工作原理图,该传感器主要由弹性轴和磁电发生器组成。

图1 磁电式转矩转速传感器工作原理图Fig.1 Schematic diagram of magnetoelectric typetorque-speed transducer
现有的转矩转速传感器大多是基于弹性轴在传递扭矩时产生弹性变形的原理进行间接测量的。磁电发生器由两组配对的内/外齿轮、磁钢和感应线圈组成。外齿轮安装在弹性轴测量段的两端,随弹性轴一起旋转。内齿轮安装在传感器自带的驱动电机轴上,和外齿轮并列。磁钢紧接内齿轮安装,感应线圈固定在传感器壳体的两个端盖内。当内/外齿轮产生相对运动时,由磁钢和内/外齿轮构成的磁路的磁通就会随之产生相应的周期变化,感应线圈中就会感应出两组近似正弦的电压信号。
这两组交流电信号的频率与弹性轴的转速成正比,它们之间的相位差与弹性轴传递的扭矩以及初始的安装位置有关,表示如下:

(1)
式中:T为被测转矩,Nm;K为待定比例系数;Δθ为两组交流信号相位差,rad;b为待定比例系数。
由式(1)可知,待测转矩与两组电压信号的有效相位差成正比,而K、b为待定比例系数。因此,磁电式型转矩转速传感器使用前需要进行静态标定,以确定式(1)中的比例系数。
由转矩转速传感器的工作原理可知,两组交流电压信号的频率是相同的,设频率为f,则转速n可表示为[9]:
(2)式中:n为所测转速,r/min;f为所测交流信号的频率,Hz;z为信号齿轮齿数。
2 转矩转速传感器静态标定系统方案
根据转矩转速传感器工作原理及结构形式,其静态标定系统,主要包括转矩转速传感器、校正臂、砝码和数据采集系统。静校系统方案如图2所示。

图2 静校系统方案原理图Fig.2 Schematic diagram of the static calibration system
根据力矩平衡原理,转矩转速传感器一端固定,另一端与校正臂连接。当校正臂另一端悬挂砝码时,转矩转速传感器弹性轴在旋转力矩的作用下,发生扭转变形。由于弹性轴的一端是固定的,此时转矩转速传感器信号输出端并没有信号产生,因此需要开启传感器自带的校正电机带动磁钢旋转,以便产生交变的感应信号。
3 数据采集系统
数据采集系统主要由数据采集卡和基于LabVIEW平台开发数据采集程序组成。数据采集卡采用NI公司生产的PCI-6221数据采集卡,具有16路模拟输入、2路模拟输出和24路数字I/O,分辨率为16位,采样频率可达250 kHz,能够满足该静校试验数据采集的需要;还可以通过2路模拟输出通道来控制试验台的加载装置。数据采集程序实现传感器信号的采集、处理及存储,并以波形和数字的形式实时地显示在前面板上。LabVIEW的核心是虚拟仪器(virtual instrument,VI),按形式可分为应用级VI和子VI。每一个VI都可以通过连接器调用其他的VI或被调用。因此,可以把一个复杂的应用程序逐步划分为若干的子模块,每个模块可由一个或几个子VI构成。
根据转矩转速传感器的工作原理可知,静校试验中所采集的信号为两组交流信号,只要能够求出这两组信号的相位差及频率,即可获得转矩转速传感器所测量的转矩和转速。
3.1 转矩的测量
由式(1)可知,转矩转速传感器的转矩与两组交流信号的相位差成正比,因此只要获得两组交流信号相位差,即可求出扭矩。
假设所采集的信号为可积分的任一周期函数f(t),则它可以写成如下傅里叶级数[10]:

(3)

因此,基波的初相位可表示为:
(4)
通过对被检测信号进行频谱分析,获得信号的相频特性,然后计算两信号在基频率处的相位差。
3.2 转速的测量
由式(2)可知,转速与信号齿轮的齿数及频率有关,齿数大小由传感器参数给出。而对于频率f,则需要对采集到的时间信号进行傅里叶变换,从而估算出信号的功率谱。其中最大功率值所对应的点就是基频点,由该点所在输入序列的位置和采样频率即可估算出信号的频率。
4 试验结果
以试验室所用JC2C型转矩转速传感器为静校对象进行静校试验,其性能参数如表1所示。
试验时,为了消除传感器迟滞带来的误差、提高测量精度,采用加码、减码两个行程的标定方法。加码行程,砝码的质量逐渐增加,每增加一次,记录对应的相位差;减码行程,砝码的质量逐渐减小,记录对应的相位差。每次标定都分为加码和减码两个行程,标定3次,试验数据如表2所示。
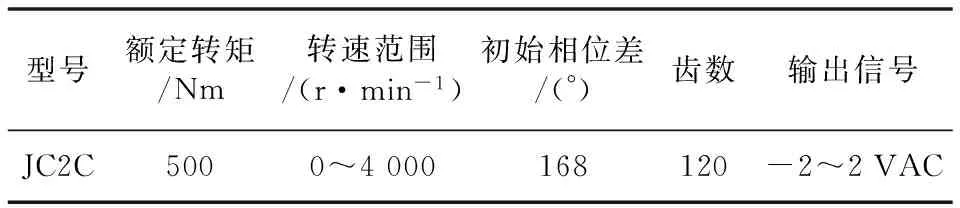
表1 JC2C型转矩转速传感器性能参数Tab.1 Performance parameters of JC2C torque-speed transducer
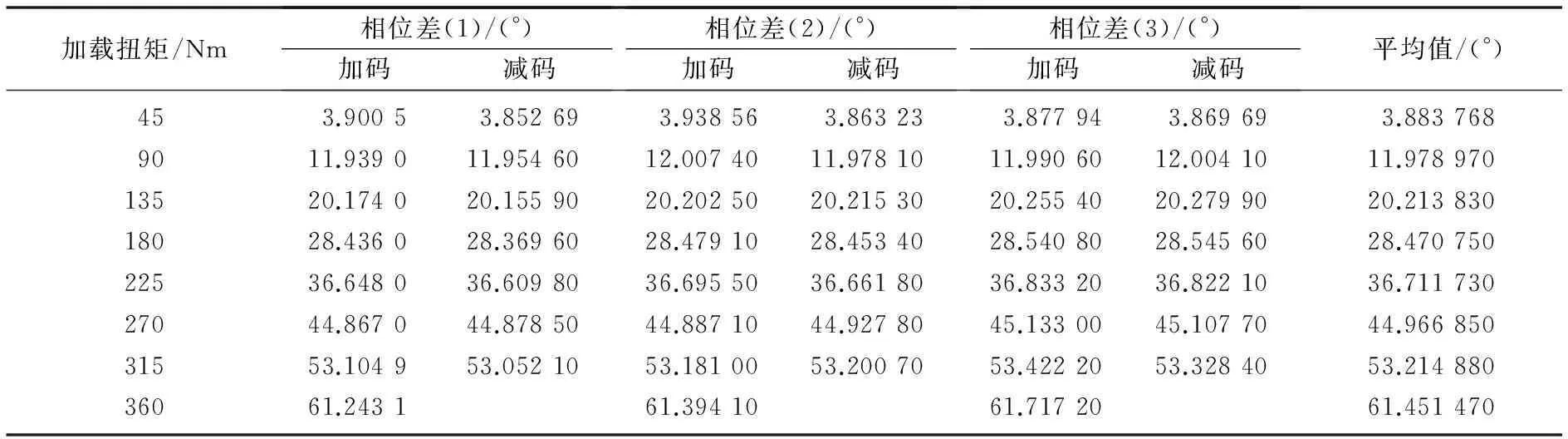
表2 转矩转速传感器转矩标定数据Tab.2 Torque calibration data of the torque-speed sensor
为了消除校正臂微量弹性变形的影响,提高试验的准确性,采用最小二乘法对表2的数据进行线性拟合,结果如图3所示。

图3 转矩标定拟合曲线图Fig.3 Torque calibration fitting curve
得到如下的拟合方程:
Δθ=0.183T-4.441 3
(5)
对式(5)作适当变换,可得到测量扭矩与相位差的关系式为:
T=5.480 6Δθ+24.293
(6)
由式(6)即可获得传感器待定比例系数K、b。
5 结束语
针对转矩转速传感器使用中需定期进行标定的需要,开发了转矩转速传感器静态标定系统。基于力矩平衡原理,设计了转矩转速传感器静态标定试验方案,传感器一端固定,另一端由砝码通过校正臂给传感器加载。针对标定试验的定期性,为了节约试验成本,开发了基于LabVIEW平台的数据采集系统,可用于不同量程传感器的静态标定试验。
以JC2C型转矩转速传感器为标定对象进行了标定试验研究。试验过程中,除了砝码加减载过程由人工操作外,数据的采集、处理及分析等过程由采集系统自动完成,操作简便,运行稳定。但当载荷增大时,校正臂会产生微量的弹性变形,影响试验结果的准确性,可通过后期的数据处理消除这个影响。本研究开发的标定系统运行稳定平稳,试验结果准确可靠,具有一定的应用价值。
[1] 周雪松,丰美丽,马幼捷,等.虚拟试验技术的研究现状及发展趋势[J].自动化仪表,2008,29(4):1-4.
[2] 刘吴月,廖明夫,刘永伟,等.风电机组传动链模拟试验台设计与实现[J].机械科学与技术,2014,33(3):366-370.
[3] 郑红梅.基于LabVIEW的腕力传感器静态标定系统研究[J].农业机械学报,2006,37(2):102-105.
[4] 姬翠翠,朱华,江炜.基于Matlab和Origin实现测力传感器的静态标定[J].传感器与微系统,2007,26(12):106-120.
[5] 刘平,岳林,刘永富.基于LabVIEW的旋转机械振动监测系统开发[J].机械科学与技术,2011,30(4):586-589.
[6] 徐宜,赵玉龙,唐秀萍.加速度传感器静态标定数据无线采集系统的设计[J].仪表技术与传感器,2011(2):38-41.
[7] 张建明,程丽萍.应用正交多项式拟合模型对测试系统进行静态标定[J].宇航计测技术,2003,23(6):50-55.
[8] Gökçen A A,Afsar S.Characterization and calibration of MEMS inertial sensors for state and parameter estimation applications[J].Measurement,2012,45(5):1210-1225.
[9] 陈昊,曹福凯.基于LabVIEW的三点法频率测量技术[J].现代科学仪器,2007(3):26-27.
[10]庞建丽,高丽娜.典型信号傅里叶分析及仿真实现[J].现代电子技术,2011,34(13):78-80.
Development of the Static Calibration System for Torque-speed Transducer
In order to improve the measurement accuracy of transducer, the static calibration system of torque-speed transducer has been developed. The calibration system is composed of torque speed transducer, correction arm, weights and data acquisition system. In accordance with the torque balance principle, the transducer is fixed at one end, and is loaded at another end by weights through correction arm. Based on LabVIEW development platform, the data acquisition system is developed, and in accordance with the operation principle of transducer,the phase difference and frequency measuring module is developed. With JC2C type transducer as the test object, the research on static calibration test is conducted. The test result shows that the static calibration system developed runs stably, and the development meets calibration requirements with low cost.
Torque-speed transducer LabVIEW Static calibration Data acquisition Data processing
高辉松(1978-),男,2008年毕业于南京农业大学农业机械化专业,获博士学位,副教授;主要从事车辆电驱动及控制的研究。
TH879
A
10.16086/j.cnki.issn1000-0380.201506018
中央高校基本科研经费专项资金项目(编号:KYZ201324);
江苏省产学研前瞻性联合研究项目(编号:BY2012140)。
修改稿收到日期:2014-07-18。