基于IMFAC的空压机出口压力控制
2015-06-10屠袁飞
屠袁飞,高 翀
(1.南京工业大学电子信息与工程学院,江苏南京 211816;2.南京邮电大学通信与信息工程学院,江苏南京 210003)
基于IMFAC的空压机出口压力控制
屠袁飞1,2,高 翀1
(1.南京工业大学电子信息与工程学院,江苏南京 211816;2.南京邮电大学通信与信息工程学院,江苏南京 210003)
以南京某石化企业的空分设备为背景,根据空压机非线性、时变、大时滞等特点,使用了一种改进的无模型自适应控制(IMFAC),设计IMFAC-PID串级控制方案,并利用MATLAB/Simulink进行仿真。仿真结果证明,IMFAC具有调节时间短、超调量小、响应速度快等特点。与基本无模型自适应控制和PID控制相比,使用IMFAC-PID的系统具有更好的鲁棒性、更快的响应速度和更高的稳态精度。
空压机;出口压力;无模型自适应控制;改进算法;串级控制
0 引言
空气压缩机是空分装置中关键设备之一,为后续的空冷塔和制冷机械提供指定压力的压缩空气,并为精馏塔提供所需的空气原料[1]。由于压缩机的状态随时发生变化,空压机出口压力的高低将直接影响实际轴功率的大小,也直接影响整个空压机系统的安全、效率、能耗等。
空压机系统是一个非线性、时变、大时滞的系统[2]。控制系统内存在各种可测和不可测扰动,被控对象的模型参数是工况参数的非线性函数,而且扰动会使模型参数受到不同程度的影响,大多数被控对象都具有迟延惯性特征[3]。因此,常规的PID控制难以达到控制要求,而且会使系统的运行压力偏高,长期运行不仅会造成能源的极大浪费,也会对设备的安全性构成威胁[1]。同时,对于压力控制的研究还有模糊预测控制[4-5]、神经网络控制[6-7]、模糊无模型自适应控制[8]和无模型自适应预测控制[9]。无模型自适应控制利用受控系统的I/O 数据来设计其控制系统,基于受控系统等价的动态线性化的数据模型,该方法可实现参数自适应控制和结构自适应控制,是一种无需建立过程模型的自适应控制方法。对于空压机这种十分复杂的系统,本就难以建立准确的数学模型,因此,文中针对空压机系统的特点,以南京某石化企业的空分设备为背景,使用了一种改进的无模型自适应控制来设计空压机出口压力控制系统,对于研究空压机的安全、空分厂的生产效率和能源的节约等问题有着重要的意义。
1 无模型自适应控制
1.1 非线性系统的系统化
考虑一般单输入单输出(SISO)离散时间非线性系统
y(k+1)=f[y(k),y(k-1),…y(k-ny),u(k),u(k-1),…,u(k-nw)]
(1)
上述非线性系统的泛模型可表示为
Δy(k+1)=φ(k)Δu(k)
(2)
式中:y(u)和u(k)分别表示系统在时刻的输入与输出;ny和nu分别表示系统阶;φ(k)为特征参量。
式(2)即为系统式(1)的泛模型,它的结构相对简单,它将一个复杂的非线性时变系统转化为了一个带有单参数的线性时变系统。
1.2 基本无模型自适应控制率算法
考虑加入准则函数
J[u(k)]=[y*(k+1)-y(k+1)]2+λ[u(k)-u(k-1)]2
(3)
以伪偏导数φ(k)估计准则函数:
J[φ(k)]= {y0(k)-y(k-1)-φ(k)[Δu(k-1)]2}+
(4)
1.2.1 控制率算法
(5)
式中:ρk为步长序列;λ为权重因子,它既避免控制律算法(3)中分母可能为0的这种情况,又可以限制了Δu(k)的变化。
1.2.2 伪偏导数估计算法

(6)
式中:ηk为步长序列;μ为权重因子。
1.2.3 辨识与控制

1.3 改进的无模型自适应控制算法

λ[u(k)-u(k-1)]2
(7)
由于输入准则函数中约束项的引入,在伪偏导数估计准则函数中,需要增加新的约束项,Δu(k-1)变化成带间隔滞后时间常数τ的2组输入值之间的变化,即带有滞后时间常数τ的输入变化约束项[u(k-1)-u(k-2-τ)],则改进的伪偏导数估计准则函数为
(8)
将式(2)分别带入式(7)和式(8),分别对u(k)和φ(k)求导,可得到改进后的无模型自适应控制算法,为


式中:T为采样时间;y0(k)为系统的实际输出;y*(k+1)为系统的期望输出;ρk,ηk∈(0,2);η,λ,μ为权重系数;ρk,ηk为步长序列;ε为一个充分小的正数[13]。
2 空压机出口压力的IMFAC-PID控制
针对空压机系统的非线性、时变、大迟滞等特点,设计空压机系统的控制方案,考虑到在出口压力的控制过程中,仅使用单回路调节,容易出现较大的动态偏差,不能满足控制要求。因此,考虑使用出口压力与入口空气流量的串级控制方案,内回路采用传统PID控制来控制其空气进口流量,外回路采用改进的无模型自适应控制来控制出口压力。内回路的任务是通过PID控制,尽量消除进气量的自发性扰动和其他进入内回路的未知扰动,外回路使用改进算法来控制出口压力,以适应空压机系统非线性、时变和大迟滞以及模型的不确定性等特点,完成对空压机系统出口压力的控制。控制方案如图1所示,控制结构如图2所示。
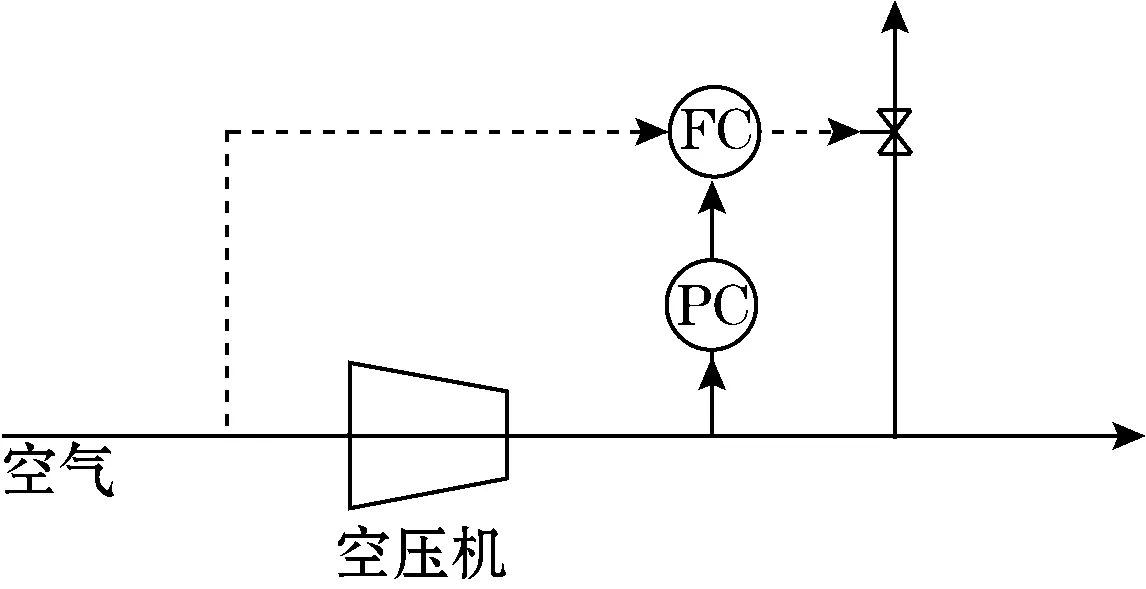
图1 空压机串级控制方案
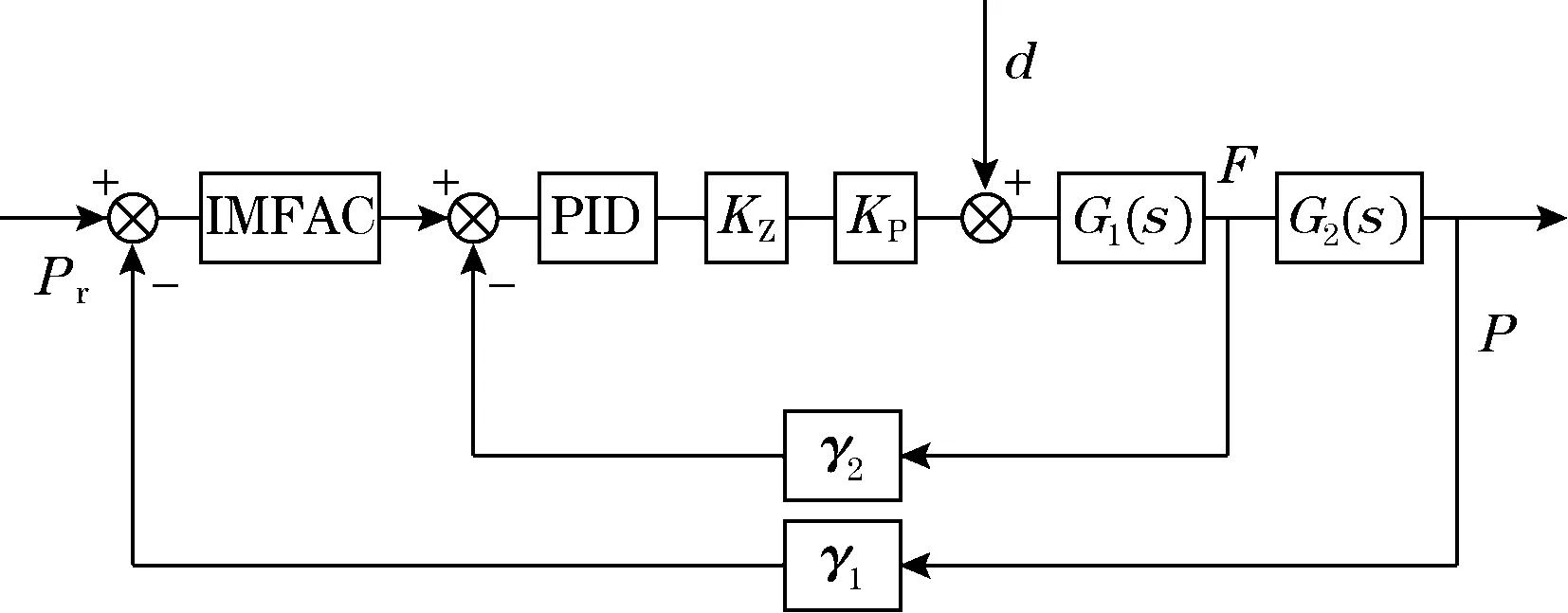
图2 IMFAC-PID串级控制系统结构
图2中,IMFAC与PID分别为主调节器和副调节器,Pr为空压机出口压力的设定值,P为空压机出口压力的实际值,F为空压机的入口流量,d为内部扰动。G1(s)和G2(s)分别为空压机的空气进口流量的传递函数和空压机出口压力的传递函数。Kz和Kp分别为执行机构和阀门的特性参数。γ1和γ2分别为空压机出口压力和进口流量变送器的传递系数。
3 仿真验证
为了测试空压机系统在使用IMFAC-PID串级控制后的控制性能,在MATLAB/Simulink中开发了改进的无模型自适应控制器,利用此控制器搭建了空压机出口压力的仿真模型,并进行了仿真模拟。由验证结果知,与传统的PID-PID串级控制和常规的MFAC-PID串级控制比较,IMFAC-PID在响应时间和鲁棒性方面具有明显的优势,验证了改进的无模型自适应控制在空压机出口压力控制系统中的有效性。

KZ为执行机构的特性参数,KZ=2;KP为阀门的特性参数,KP=8.5;γ1、γ2分别为空压机出口压力变送器和进口流量变送器的传递系数,γ1=0.52;γ2=0.037。仿真结果见图3和图4。

图3 空压机出口压力控制无扰动仿真比较效果
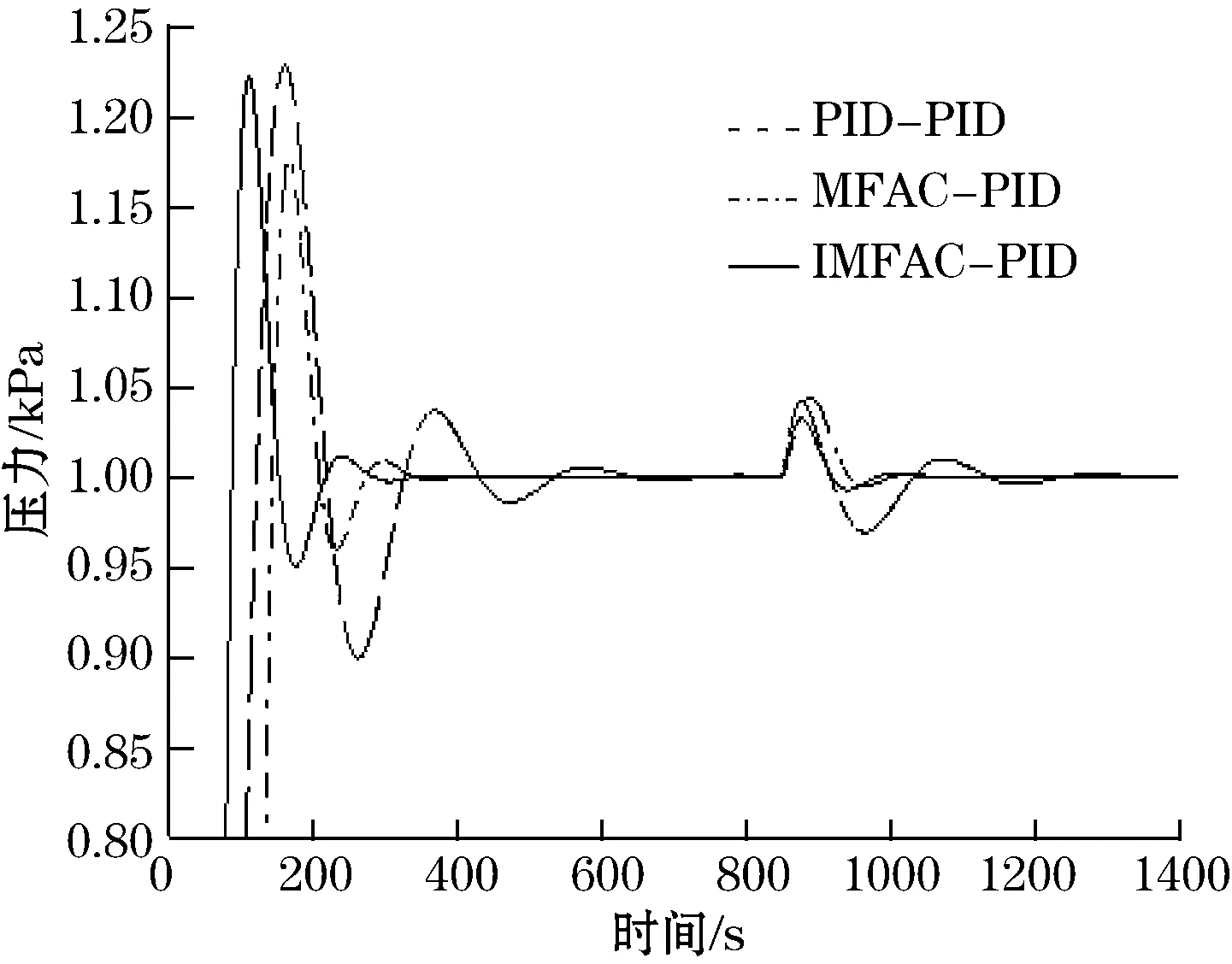
图4 空压机出口压力控制定值扰动仿真比较效果
由图3可见,在无扰动环境下,3种控制算法,都具有一定的稳定性,其中PID-PID的稳态误差为0.000 73,MFAC-PID与IMFAC-PID算法的稳态误差几乎都为0,即3种控制算法的稳态精度都很好。PID-PID串级控制调节时间ts为407 s,峰值时间tp为169 s,超调量σp为22%。MFAC-PID串级控制调节时间ts为258 s,峰值时间tp为171 s,超调量σp为19%。IMFAC-PID串级控制调节时间ts为207 s,峰值时间ts为164 s,超调量σp为21%。从调节时间ts和峰值时间tp来看,IMFAC-PID控制时间最短,即IMFAC-PID有最快的响应速度。从超调量σp来看,MFAC-PID算法超调量最小,IMFAC-PID算法的超调量位于两者之间,也具备良好的稳定性。详细的性能指标见表1。
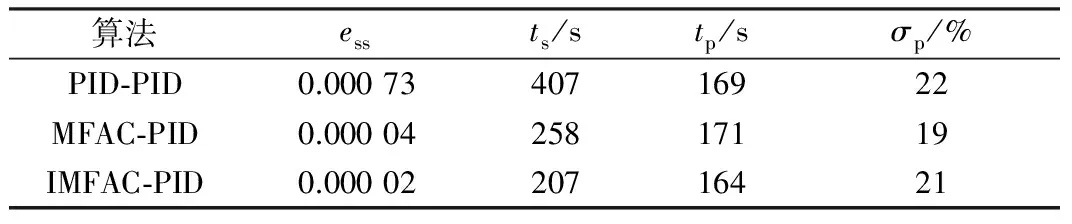
表1 3种控制算法无扰动下的性能指标
由图4可见,在定值扰动环境下, PID-PID串级控制调节时间ts为149 s,峰值时间tp为29 s,超调量σp为4.2%。MFAC-PID串级控制调节时间ts为73 s,峰值时间tp为30s,超调量σp为4.1%。IMFAC-PID串级控制调节时间ts为50 s,峰值时间tp为27 s,超调量σp为3.7%。从调节时间ts和峰值时间tp来看,IMFAC-PID控制时间仍然最短,即IMFAC-PID有最快的响应速度。从超调量σp来看,IMFAC-PID算法超调量最小,在扰动下,具备最好的稳定性,鲁棒性强。详细的性能指标见表2。
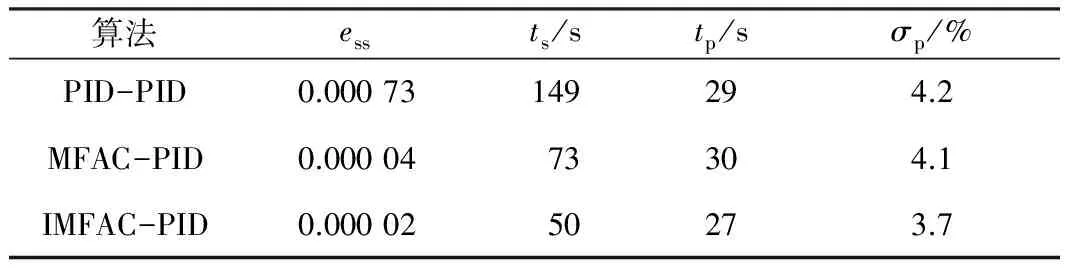
表2 3种控制算法无扰动下的性能指标
4 结束语
根据空压机系统的特点,分析并设计了空压机出口压力的串级控制方案,使用改进的无模型自适应控制与传统的PID控制组成了IMFAC-PID控制。使用MATLAB/Simulink开发了MFAC与IMFAC仿真模块,利用此模块搭建了空压机出口压力控制的系统模型并进行了仿真。由仿真结果知,空压机系统在使用改进的无模型自适应控制与PID组成的串级控制后,在无扰动环境下,具有超调量小、调节时间短、响应速度快等优势,具有良好的稳定性、响应速度和稳态精度。在扰动环境下,具有良好的鲁棒性,控制效果理想。
[1] 张小亮.空压机系统的智能控制与仿真研究:[学位论文].武汉:武汉科技大学,2010.
[2] 张媛媛.不确定时滞系统的稳定性分析与镇定:[学位论文].杭州:浙江大学,2010.
[3] 赵长祥.预测控制在电厂中的应用研究:[学位论文].南京:东南大学,2004.
[4] MAZINAN A H,SADATI N.Fuzzy predictive control based multiple models strategy for a tubular heat exchanger system.Applied Intelligence,2010,33(3):247-263.
[5] WANG G D,YAN X A,XIAO J L,et al.Grey prediction fuzzy control for electro-hydraulic proportional pressure control system.Meitan Xuebao,2006,31(4):525-528.
[6] IWASA K,MORIZUMI N,OMATU S.Pressure control in a plant generating chloride by neural network PID control.IEEE International Conference on Neural Networks - Conference Proceedings,1995(1):627-630.
[7] 翁桂荣,周江,赵鹤鸣,等.人工神经网络在压力传感器中的应用.仪表技术与传感器,1999(10):33-35.
[8] 梁流涛,陈铁军,崔丹丹.模糊无模型自适应控制器在CFB锅炉主蒸汽压力控制中的仿真研究.热力发电,2010,38(7):36-50.
[9] 冯玉昌,史冬琳,白佳文.主蒸汽压力的无模型自适应预测控制.热力发电,2012,41(8):37-40.
[10] 温锐,董学平,鲁照权.无模型控制在步进加热炉速度控制中的应用.合肥工业大学学报(自然科学版),2012,35(10):1327-1396.
[11] 刘飞祥.无模型自适应控制方法及其应用研究:[学位论文].太原:太原科技大学,2008.
[12] 金尚泰,侯忠生.一类非线性大滞后系统的改进无模型自适应控制.控制理论与应用,2008,25(4):623-626.
[13] 陈琛,何小阳.一种大时滞系统的无模型自适应控制改进算法.计算技术与自动化,2012,31(3):10-13.
Air Compressor Outlet Pressure Control Based on IMFAC
TU Yuan-fei1,2,GAO Chong1
(1.College of Electronic and Information Engineering,Nanjing Tech University,Nanjing 211816,China;2.College of Telecommunication and Information Engineering,Nanjing University of Posts andTelecommunications,Nanjing 210003,China)
In the context of air separation plant of a petrochemical enterprise in Nanjing,based on the air compressor has the characteristics of nonlinear,time-varying and large time delay,an improved model-free adaptive control (IMFAC) was used,the IMFAC-PID cascade control scheme was designed and a simulation was carried out by adopting Matlab simulation software.The simulation result shows that improved model-free adaptive control has shorter setting time,less overshoot and higher response speed.Compared with the basic model-free adaptive control and PID control,the system has better robustness,higher response speed and steady-state accuracy using IMFAC-PID.
air compressor; outlet pressure; Model-Free Adaptive Control; improved algorithm; cascade control
张弘一(1987—),助理工程师,硕士。从事仪器仪表、传感器产品的检测技术研究工作。 E-mail:Zhanghongyi626@126.com
2014-05-13 收修改稿日期:2015-03-02
TP29
A
1002-1841(2015)05-0104-03