运用RGRR-I构造5RP混联机器人手臂的构型研究*
2015-06-09顾若波刘勇兰
顾若波,刘勇兰,姜 铭
(南通科技职业学院,江苏南通 226000)
运用RGRR-I构造5RP混联机器人手臂的构型研究*
顾若波,刘勇兰,姜 铭
(南通科技职业学院,江苏南通 226000)
传统的串联结构的关节式机器人手臂存在在刚度低的缺点。并联双自由度转动机构RGRR-玉刚度高,且有着工作空间/机构尺寸比大、活动构件少、制造容易等一系列优点。基于关节式机器人手臂的工作要求,运用并联双自由度转动机构RGRR-玉构造出实现绕XYZ三个直线运动坐标移动,两个运动轴坐标回转的混联五轴联动机器人手臂,并分析其工作机理,建立起有关模型。该研究也为其他混联机器人手臂的设计研究提供了借鉴。
混联;机器人手臂;刚度;自由度
0 引 言
关节式机器人手臂动作灵活[1],工作空间大,广泛运用于工业机器人[2]。但是目前关节式机器人手臂大多是多自由度的串联结构[3],工作时承受很大弯矩和扭矩,不容易获得高的结构刚度[4];另外各环节变形量相迭加,手臂不易获得高的精度,在一定程度上影响了机器人手臂的似人效果[5]。
并联机构由于其机构刚度强、承载能力大、位置精度高等优点[6],并联机构的出现弥补了串联机构刚度差、精度低的不足,使得机构结构刚性差、机构动平台高度化难这两大瓶颈得以突破[7],因此利用并联构造新型的机器人、机床构型的研究成为当今学术界的热点[8]。
并联双自由度转动机构RGRR-玉刚度高[9],且有着工作空间/机构尺寸比大、耦合为零、制造容易等一系列的优点[10]。本文在RGRR-玉转动机构的研究基础上,运用2个RGRR-玉转动机构、一个移动机构P、一个转动机构R构造混联5RP机器手臂。所构造的5RP机器手臂,其组合的构型数目多,当这些方案中不止一个符合条件时,对其进行构型分析,从而进行优化选择,进而使所构造的混联机器人满足六个自由度、有解析解的正、反解、工作空间大、刚度高等一系列优点。笔者的研究为RGRR-玉混联5RP机器人手臂的进一步深入研究及运用打下了基础,也为其它并联、混联机构的构型研究提供的借鉴。
1 RGRR-I并联双自由度机构原理
如图1所示为RGRR-I并联双自由度转动机构(简称RGRR—I)简图,构件0为机架,圆锥齿轮1 (中心轮)和圆锥齿轮2(行星轮)在啮合于K点,圆锥齿轮1与圆锥齿轮2的回转轴心线相交于O点,圆锥齿轮1的运动输入控制圆锥齿轮2绕着其自身轴线的旋转,幅度为0°~360°;系杆3的运动输入控制圆锥齿轮2绕着系杆3的轴线进行摆动,幅度为-90°~90°;因此圆锥齿轮2的运动输出是双自由度转动。
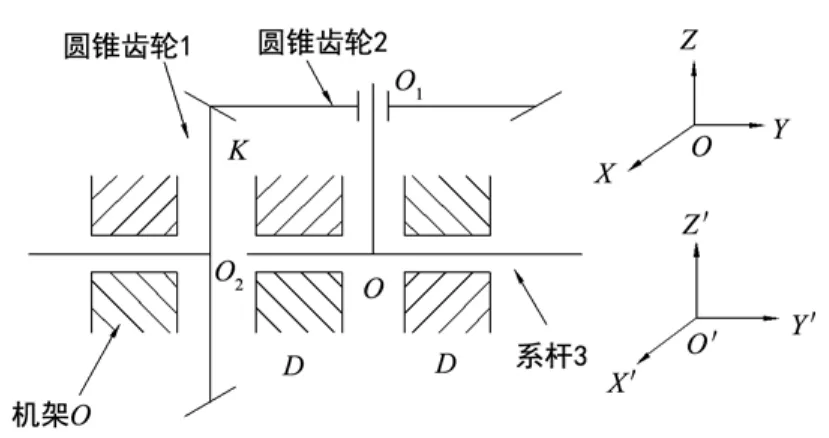
当圆锥齿轮1、系杆3作为运动输入,分别转动β1、β3角度时,圆锥齿轮2作为运动输出构件在固定坐标系中的空间旋转矩阵即为:

上式中Z1和Z2分别为圆锥齿轮1和圆锥齿轮2的齿数。
2 混联5RP机器人手臂关节排列分析
运用RGRR-玉构造的5RP混联机器人手臂由四个关节组成,即并联双自由度转动关节(RGRR-玉)、一个移动副(P)、一个转动副(R),根据排列组合我们可以知道它们共有12种不同的组合方案。
2.1 第一关节的优化选择
(1)在外力作用下混联5RP机器人末端手爪的位置偏差与机器人各关节的刚度有着密切的联系,对机器人手臂而言,遇靠近机架的关节,其刚度要求愈高。考虑到RGRR-玉刚度高于转动关节R、移动关节P,因此把RGRR-玉并联双自由度转动机构作为机器人第一关节。
(2)并联双自由度转动机构RGRR-玉可实现绕固定坐标系z轴的摆动,幅度为-90°~90°,以及绕摆动轴x1轴的360°的转动,将其作为第一关节,可提高5RP混联机器人手臂的多自由度灵活转动。
(3)将并联双自由度转动机构RGRR-玉作为第一关节,RGRR-玉上附带的转动电机和摆动电机则直接和机器人手臂的机架相连接,转动电机和摆动电机的重量直接附加在机架上,这样能够有效的减少机器人手臂在运动时的转动惯量,提高机器人手臂的运动精度,还使机器人下部重量增加,提高了机器人手臂运动时的稳定性。
综上考虑将RGRR-玉并联双自由度转动机构作为机器人的第一关节。此时混联5RP机器人的关节分布还有6种情况。如表1所列。
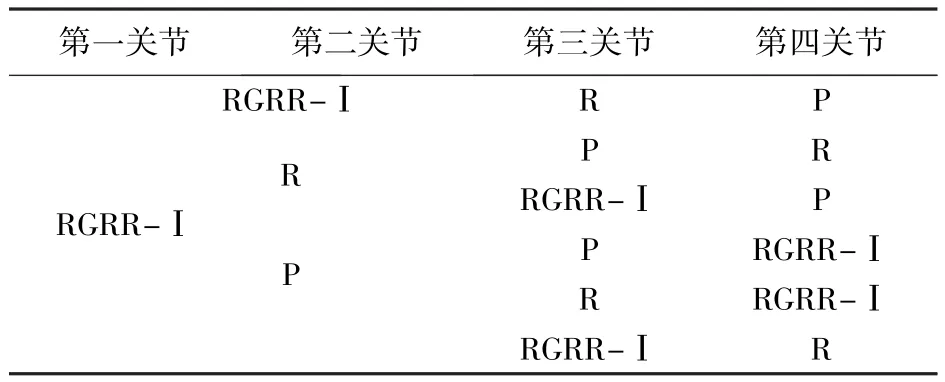
表1 以RGRR-I作为第一关节时混联5RP机器人的关节排列组合
2.2 根据机构的封闭解分析关节排列
传统的6自由度串联机器人看做由两部分组成:前3个关节构成手臂部分,后3个关节构成手腕部分,手臂部分主要控制末端位置,手腕部分控制末端姿态为了得到封闭形式的位置逆解,一般采用所谓的球形手腕,即3个转动关节轴线交于一点,恰好满PIEPER方法给出的具有封闭解的条件。本文中运用三轴相交的PIEPER方法判断发现仅表3中的2种结构,其最后3个关节为转动关节且关节轴相交于一点,因此表3中所示2种关节排列得到的机器人手臂具有封闭解。

表2 具有封闭解的关节排列
2.3 根据刚度评价分析确定最终关节排列
根据表格2中的两种排列分布,从刚度方面对这两方案进一步讨论。考虑到并联转动关节结构较单自由度关节复杂,且需要两个电机,质量大,所以我们讨论刚度大小时主要根据并联转动关节在串联链上的位置来评定,由于单自由度质量较小,为简便起见,单自由度关节在串联链上位置变化引起的刚度变化我们不作考虑。我们设定如下评定方法:从基座到末端关节关节序号分别为1-2-3-4,若并联转动关节在1处则为A,在2处则为B,在3处则为C,在4处则为D.最后将两者相连,此处我们定义刚度比较原则为A>B>C>D;则RGRR-玉-P-R-RGRR-玉型结构和RGRR-玉-R-P-RGRR-玉型结构的得分为AD,RGRR-玉-P-RGRR-玉-R型结构的得分为AC。此可以得出:RGRR-玉-P-RGRR-玉-R构型结构刚度高于RGRR-玉-P-R-RGRR-玉型结构。
因此按照RGRR-玉-P-RGRR-玉-R关节顺序排列构造的混联5RP机器人手臂应该为最优结构。其结构简图如图2所示,虚拟样机如图3所示。

图2 RGRR-玉-P-RGRR-玉-R结构机器人简图
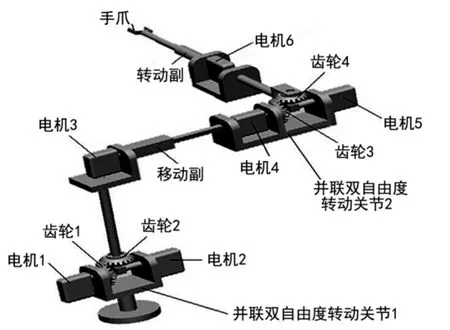
图3 混联5RP机器人虚拟样机
3 结 论
(1)RGRR-玉并联双自由度转动机构具有刚度高、工作空间大的优点,运动输出构件(行星轮)支撑主要由系杆的端面实现的,中心轮与行星轮这对运动副主要传递转矩,摆动由系杆实现,故RGRR-玉并联双自由度转动机构适合作为机器人手臂关节。
(2)按照RGRR-玉-P-RGRR-玉-R关节顺序排列构造的混联5RP机器人手臂应该为最优结构。
(3)运用RGRR-玉构造5RP混联机器人手臂的构型研究为其他混联机构的设计提供借鉴。
[1] MERLET J P.Parallel robots[M].Netherland:Kluwer Academic Publishers,2006.
[2] 李 彬,黄 田,张利敏,等.一种新型五自由度混联机械手的概念设计及尺度综合[J].中国机械工程,2011,22(16):1900-1905.
[3] HARA.Synthesis of Parallel Micromanipulators[J].Journal of Mechanisms Transmissions Automation Design,2008(111):34-39.
[4] LU Yi,HU Bo.Solving driving forces of 2(3-SPR)serialparallel manipulator by CAD variation geometry approach[J].Journal of Mechanical Design,2006(128):1349-1351.
[5] Roberto Horowitz,Li Yun feng,Kenm Oldham.Dualstage Servo Systems and Vibration Compensation in Computer Hard Disk Drives [J].Control Engineering Practice,2007,15(3):291-305.
[6] DLrries Scharmann Technologie GmbH.Spr int Z3[EB/OL].2006 -12-10.
[7] 姜 铭,孙 钊,秦康生,等.混联机器人的分析及研究[J].制造业自动化,2009,31(1):61-65.
[8] Liang C G,Rong H.A Direct Displacement Solution to the Stewart Platform Mechanical H and[J].Journal of Mechanical Engineering, 1991,27(2):26-30.
[9] 姜 铭,易 红.RGRR-玉构造混联6R机器人[J].机械工程学报,2010,46(1):30-36.
[10] 姜 铭,李鹭扬,易 红,等.并联转动机构RGRR的研究及分析[J].中国机械工程,2009,20(5): 577-580.
Architectural Research on 5RP Hybrid Robot Arm Based on RGRR-I
GU Ruo-bo,LIU Yong-lan,JIANG Ming
(Nantong Science and Technology College,Nantong Jiangsu 226000,China)
The typical series machine tools have the disadvantage of low stiffness,while the RGRR-玉has the characteristics of high stiffness,and the advantages of fewer moving parts,bigger comparison of workspace to dimension,easy manufacturing, etc.Based on the requirements of hybrid machine tool,the hybrid machine tool which can travels along the axis of XYZ and rotate with two axis of revolution is researched,and its working principle is also analyzed to set up the model.The study also provides the reference of design and manufacturing to other hybrid machine tools.
hybrid;robot arm;stiffness;degree of freedom
TP215
A
1007-4414(2015)04-0099-03
2015-06-07
顾若波(1987-),男,江苏常熟人,助教,硕士研究生,主要从事机械制造与自动化专业教学研究。
