火箭炮平衡悬架钢板弹簧三连杆模型研究
2015-06-09马大为武秋生
肖 雄,马大为,武秋生
(南京理工大学机械工程学院,江苏南京 210094)
火箭炮平衡悬架钢板弹簧三连杆模型研究
肖 雄,马大为,武秋生
(南京理工大学机械工程学院,江苏南京 210094)
0 引言
远程多管火箭炮结构复杂,设备精密度高,行驶路况多变。良好的平顺性可以保证武器系统的可靠性,同时有效缓解驾驶人员的疲劳感。悬架系统动力学建模是平顺性研究中的重要环节。因此,建立合理的悬架系统动力学模型具有重要的意义。
某远程多管火箭炮采用钢板弹簧平衡悬架。目前,常用的钢板弹簧动力学建模方法有:有限元建模法[12]、离散梁单元建模法[3-4]和SAE三连杆建模法[5]等。SAE三连杆建模法模型简单,计算效率高,能够实现对变刚度弹簧的仿真,所以使用其进行建模。
1 钢板弹簧有限元模型
某远程多管火箭炮采用钢板弹簧平衡悬架,钢板弹簧参数如表1所示。

表1 钢板弹簧几何参数
钢板弹簧簧片对称排列,中部由2根U型螺栓加持,两端自由地支承在中、后桥桥壳的座架上。在有限元模型中使用上下夹板模拟螺栓的加持作用,限制簧片间垂向相对位移。钢板弹簧有限元模型如图1所示。

图1 钢板弹簧有限元模型
在上夹板上表面中心位置建立参考点,并与夹板上表面耦合,约束参考点运动方向,使其只能产生垂向位移;上下夹板建立BEAM连接属性,使两夹板不会产生相对运动;座架施加固定约束;各部件之间建立接触约束,采用有限滑移模式,接触面之间可以任意滑动,簧片间摩擦系数设为0.1;在上夹板参考点上分步施加集中力,作用方向垂直向下,大小为112 800 N;材料的弹性模量为210 000 MPa,泊松比为0.3,密度为7.85×109t/mm3。输出上夹板参考点所受载荷与位移关系曲线,即得到钢板弹簧的刚度特性曲线,如图2所示。

图2 钢板弹簧刚度特性有限元计算结果
2 钢板弹簧三连杆模型
平衡悬架钢板弹簧为对称结构,以第1簧片示意钢板弹簧结构,如图3所示。图3中,a为钢板弹簧前半部分长度;b为U型螺栓间距;L为第1簧片长度。
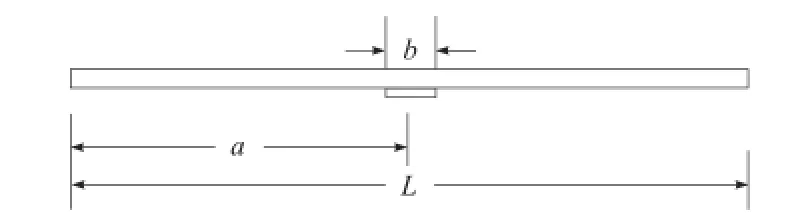
图3 钢板弹簧结构
钢板弹簧三连杆模型基于圆弧近似算法,假设钢板弹簧簧片变形时为理想的圆弧形状,利用ADAMS软件建立3个连杆来等效钢板弹簧变形,如图4所示。在连接点B、C处添加旋转副;在连接点A、 D处添加虚拟件,虚拟件与大地建立移动副,与杆建立旋转副,移动副方向为水平方向;中杆与大地建立移动副,方向为垂直方向;在中杆质心处施加112 800 N的载荷,方向垂直向下。为实现对钢板弹簧刚度特性的模拟,三杆之间添加扭转弹簧,通过设置扭转弹簧的刚度参数达到模拟的目的。扭转弹簧刚度参数的设置是建立三连杆模型的关键,对变刚度钢板弹簧模拟时,扭转弹簧刚度参数可以用关于转角的函数表示。鉴于有限元法得到的钢板弹簧刚度特性曲线,可使用三次多项式表示扭转弹簧刚度,使用PHI函数返回扭转弹簧转角,刚度函数表示为:

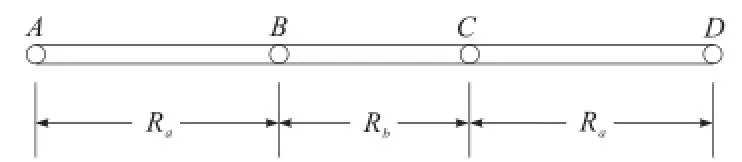
图4 钢板弹簧三连杆模型示意
钢板弹簧三连杆各段长度计算公式为:

3 钢板弹簧三连杆模型参数辨识
钢板弹簧三连杆模型参数辨识的目的,是确定扭转弹簧刚度多项式系数。
3.1 Isight集成优化法
集成优化法采用优化软件Isight-FD,以有限元计算结果为目标值,结合数据处理软件Matlab来确定扭转弹簧刚度多项式系数,优化流程如图5所示。图中Optimization为优化算法组件,用于优化算法的选择、输入量的调整;Simcode为通用程序集成组件,集成ADAMS程序,用于更改ADAMS仿真输入文件、调用ADAMS求解器进行仿真计算,并将计算结果输入到Matlab和Optimization组件;

图5 集成优化法优化流程
Matlab用于约束方程的计算,并将计算结果输入到Optimization组件。
优化变量:DV_1,DV_2,DV_3,DV_4。
优化目标:作用力达到112800N时,垂向位移与目标值之差最小,即

优化约束:仿真时间为整数时,垂向位移与目标值之差小于1mm,即

Isight集成优化法采用多岛遗传算法(MIGA),MIGA算法计算量较大,但其适应性强,并具有全局性,计算结果较为准确。经过1000次迭代计算,第983次迭代结果较为理想。优化计算历程如图6所示,计算结果如表2所示。

图6 优化计算历程

表2 集成优化法计算结果
将设计变量的计算结果输入到ADAMS中进行仿真计算,并输出中杆的垂向载荷与垂向位移关系曲线,如图7所示。

图7 集成优化法仿真结果对比
3.2 逆向仿真法
逆向仿真法基于有限元计算结果,利用ADAMS对钢板弹簧三连杆模型进行逆向仿真,以此得到扭转弹簧刚度与转角的关系。具体过程如下所述。
首先对三连杆模型进行改动,去掉扭转弹簧连接和中杆所受载荷,在中杆移动副上添加位移驱动,驱动方向为垂直向下。将有限元模型上夹板参考点的位移与时间关系数据输入到ADAMS中,并施加在位移驱动上,仿真时间与ABAQUS计算时间相等,输出连接点B、C处的转角与时间的关系。
去掉位移驱动,在连接点B、C处添加扭转驱动,将转角与时间关系数据施加到扭转驱动上;将有限元模型上夹板参考点的载荷与时间关系数据输入到ADAMS中,并作用在中杆质心处。输出连接点B、C处转矩与转角的关系。
将转矩与转角关系数据导入Matlab中,使用cftool对曲线进行拟合,得到转矩关于转角的函数。对函数进行一阶求导,即得到扭转弹簧刚度关于转角的函数。刚度多项式系数如表3所示。

表3 逆向仿真法计算结果
将三连杆模型恢复到初始状态,并将逆向仿真法计算结果添加到扭转弹簧刚度参数中,仿真结果如图8所示。
从图8可以看出,通过集成优化法与逆向仿真法得到的刚度特性与有限元结果相吻合。

图8 逆向仿真法结果对比
4 结束语
三连杆模型结构简单,计算效率高,可用于整车的动力学仿真研究。将这一模型用于平衡悬架,以便研究远程多管火箭炮的平顺性能。通过Isight集成优化法与逆向仿真法,对三连杆模型参数进行辨识,从与有限元结果对比中可以看出,三连杆模型准确地实现了对钢板弹簧刚度特性的模拟,为远程多管火箭炮的平顺性分析打下了基础。
[1] 郑银环,张仲甫.汽车钢板弹簧多柔体建模及仿真研究[J].湖北工业大学学报,2007,22(4):3536.
[2] 吴碧磊.重型汽车动力学性能仿真研究与优化设计[D].长春:吉林大学汽车学院,2008.
[3] 李杰,张喆,朱毅杰,等.平衡悬架钢板弹簧模型的建立与仿真[J].重庆大学学报,2011,34(6):3135.
[4] 鞠成超,韩旭,刘桂萍.钢板弹簧离散梁动力学参数反求[J].汽车工程,2009,31(9):860863.
[5] 景立新,郭孔辉,卢荡.钢板弹簧三连杆模型参数辨识研究[J].汽车技术,2010(12):1013.
Studyon Three-link Leaf Spring Model for Balanced Suspension of Rocket Launchers
XIAO Xiong,MA Dawei,WU Qiusheng
(School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China)
以远程多管火箭炮平衡悬架钢板弹簧为研究对象,利用ABAQUS软件建立了有限元模型,得到了钢板弹簧刚度特性。为便于研究远程多管火箭炮的平顺性能,将钢板弹簧简化为三连杆模型,通过Isight集成优化法与逆向仿真法对三连杆模型参数进行辨识,建立了准确的三连杆模型。利用ADAMS对三连杆模型进行仿真计算,并与有限元结果对比,验证了模型的准确性。
钢板弹簧;三连杆模型;参数辨识
This paper studies the leaf spring for balanced suspension of long-range multi-barrel rocket launchers.A finite element model has been established by ABAQUS to get stiffness characteristics of leaf springs.To facilitate the study of the ride comfort of long-range multi-barrel rocket launchers,steel springwas reduced to three-link model.An accurate three-link model has been established by using Isight integrated optimization method and reverse simulation method to identify parameters.The simulation results of three-link model was obtained by using ADAMS and compared with finite element results,thus validating the accuracyof the three-link model.
leaf spring;three-link model;parameters identification
TJ393;U463.33
A
1001-2257(2015)09-0008-03
肖 雄(1989-),男,河北保定人,硕士研究生,研究方向为火箭炮行驶动力学和安全性分析;马大为 (1953-),男,江苏南京人,教授,研究方向为火箭炮发射系统控制与仿真技术。
2015-04-28
