变形轮侦察机器人的控制系统设计
2015-06-08陈科山王志腾刘潇伟
陈科山,王志腾,闫 硕,王 玉,刘潇伟
(1.北京交通大学 北京 100044;2.电子科技大学 四川 成都 611731;3.北京铁路局 丰台机务段,北京 100000)
机器人是一种综合了多种科学技术的产品,是目前科学技术发展最活跃的领域[1],根据移动方式,可分为轮式、步行、履带、爬行和蠕动机器人等,目前已经被广泛的应用于军事侦察和抢险救灾等复杂环境中。此类现场通常非常混乱,充满危险,道路遭到破坏,人员无法短时间内通过障碍,此时可通过操控侦察机器人进入现场,考察情况。根据实际需求,机器人应具备以下功能:
1)移动稳定、灵活。在平整路面上具有较快的行驶速度,且转向灵活。
2)较强的越障能力。当遇到障碍物时,可以顺利通过。
3)具备可靠的通信手段。在合适的通信距离内,实现人机分离的遥控状态,对机器人进行实时控制。
传统的轮式机器人机构简单,控制方便灵活,能够在平坦路面高速稳定行驶,然而在面对废墟、沟壑、砂石等非结构化路面时显得有些无能为力[2],机构和控制系统的好坏直接决定了机器人能否进入现场完成侦察任务。
1 机器人机械结构设计
针对上文提出的3个功能要求,设计了如图1所示的变形轮机器人。该机器人由车体平台和车轮两部分构成。车轮是该机器人的重要部分,通过其变形机器人具有两种步态:轮式移动和爪式爬行。当面对非结构化路面时,车轮打开,采用爪式爬行的方式适应环境;当面对平坦路面时车轮复位,以轮式移动的方式高速机动。
2 机器人控制系统分析与设计
2.1 机器人功能需求分析
针对本文提出的应用背景,控制系统总体上采用上下两级的控制方案,图2为变形轮侦察机器人控制系统结构框图,包括监视操作系统和车载控制系统。监视操作系统实现对机器人的远程遥控,监视现场环境、电池电量、机器人方位等参数,提供操控者和机器人之间人机交互接口。车载控制系统从功能上划分为3个子系统:1)主控子系统:接收远程指令,规划机器人步态,将数据打包发送,实时诊断机器人安全状况,处理紧急情况和异常状态。2)协控子系统:该机器人4个车轮具有相同的结构、相同的功能,以每个车轮为一个协控子系统,实现控制算法,执行机器人的运动步态。3)传感子系统:感知现场环境,为操作人员提供决策依据。
2.2 控制系统主要硬件构成
1)监视操作系统:利用功能强大的PC机进行人机交互界面的开发;为缩短开发周期,使用现有的北通游戏手柄作为机器人操作杆,利用其16个按键和两个摇杆,实现启动、急停、转向、调速和步态切换等任务。
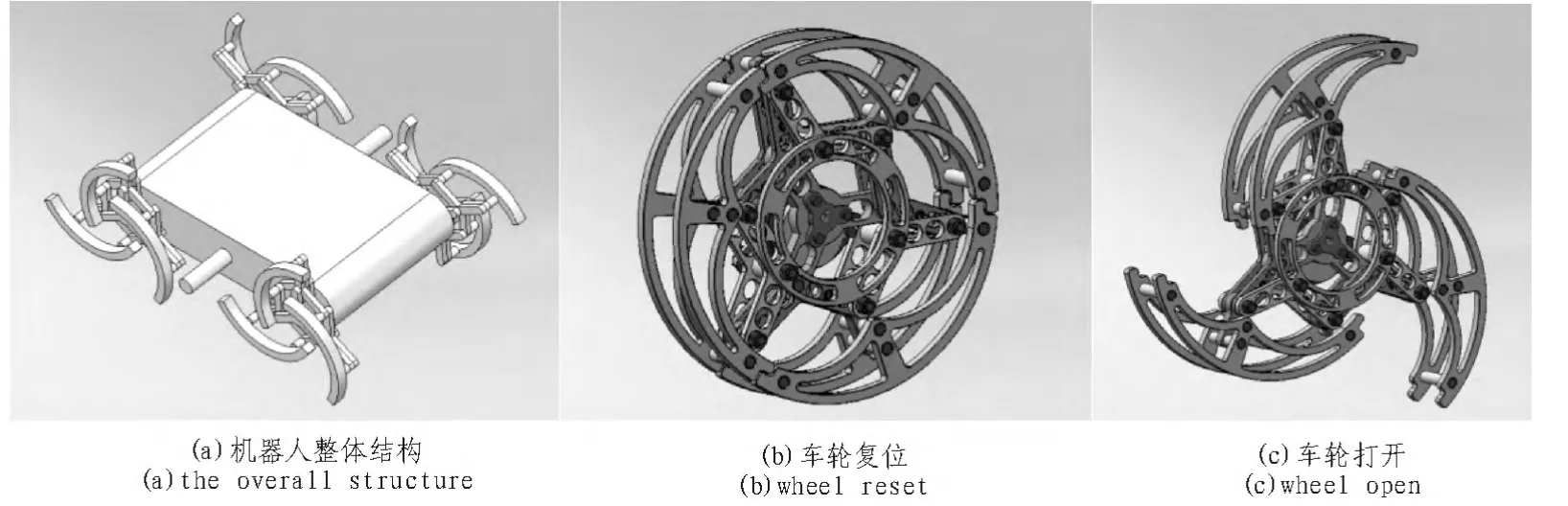
图1 机器人与车轮结构示意图Fig.1 Schematic diagram of the robot and the wheelstructure
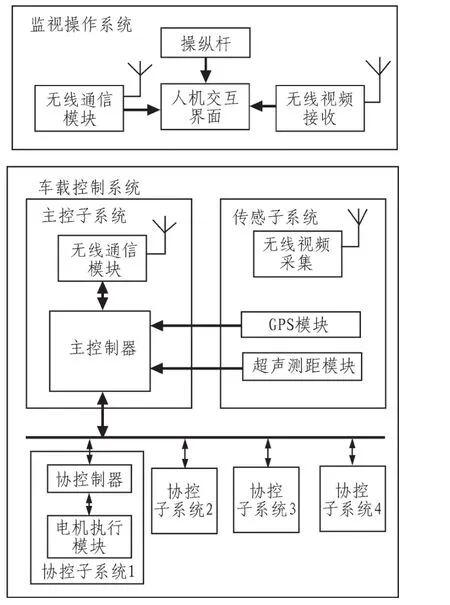
图2 控制系统结构框图Fig.2 Control system block diagram
2)主控子系统:由于外设较多,需要有丰富的I/O和接口资源,同时程序执行速度要满足实时性的要求,选择STM32F103微控制器作为车载主控制器,通过其RS232接口、RS-485和IIC总线接口方便的与外设和子系统相连。
3)协控子系统:其主要完成机器人运动步态的执行,采用MSP430高性能单片机作为协控制器,应用RS-485总线与主控子系统构成车载分布式控制系统,接收主控制器的报文,软件实现数字PID算法,经过A/D转换模块、光耦隔离模块和功率放大模块后驱动执行机构;车轮变形和运动分别由两台电机实现,变形用电机安装于车轮中心,由于尺寸限制,选用大力矩的小型直流减速电机,额定转速5 r/min,力矩可以达到15 Kgf·cm。运动用电机采用结构简单、调速性能良好的普通直流调速电机,通过编码器形成闭环控制。
4)无线通信和无线视频模块:远程操控人员与机器人的通信采用大功率、低功耗的无线射频模块,以GFSK调制方式进行收发,尺寸小,灵敏度高,可靠传输距离在1 000 m以上,使操作人员能够在安全的后方对机器人进行操作,满足复杂环境远程通信的要求;视频的采集和接收采用的是频率1.2 GHz的无线视频模块实现,保证在1 200 m的距离内实现清晰视频的传输。
2.3 控制系统软件实现
2.3.1 人机交互界面开发
人机交互是机器人研究的一项关键技术,基于人机交互的控制系统能够辅助机器人完成任务,是提高机器人效率的有效途径[3]。LabVIEW是美国国家仪器公司开发的虚拟仪器开发平台软件,功能强大灵活,广泛应用于测试测量系统、过程控制、工业自动化、实验室研究和仿真等各个领域。其提供了各种按钮和显示控件,并且提供了键盘、手柄信息采集函数库,利用其图形化的编程语言可以方便的进行人机交互界面开发[4],本系统主要用到了使用IMAQ USB模块和VISA模块。监控操作界面设计如图3所示。主要程序设计包括视频监控、手柄读取和串口收发。如图4所示。

图3 监视操作界面Fig.3 Monitor and operation interface
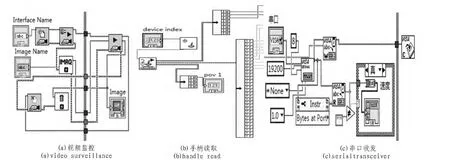
图4 人机交互界面主要程序设计Fig.4 Main program design of man-machine interface
2.3.2 车载控制系统软件设计
车载控制系统的软件总体流程如图5所示,主要分为三步,首先是设备上电,完成设备初始化工作,进行自检。第二步是建立起通信连接,实现无线数据链路,保证数据传输稳定可靠,第三步则是进行具体的数据采集、打包发送、步态规划,实现该控制系统的各项功能,其中协控子系统主要实现数字PID算法,驱动执行机构,主控制器与协控制器之间的报文格式设计如表1所示。

图5 软件流程图Fig.5 Software flow chart
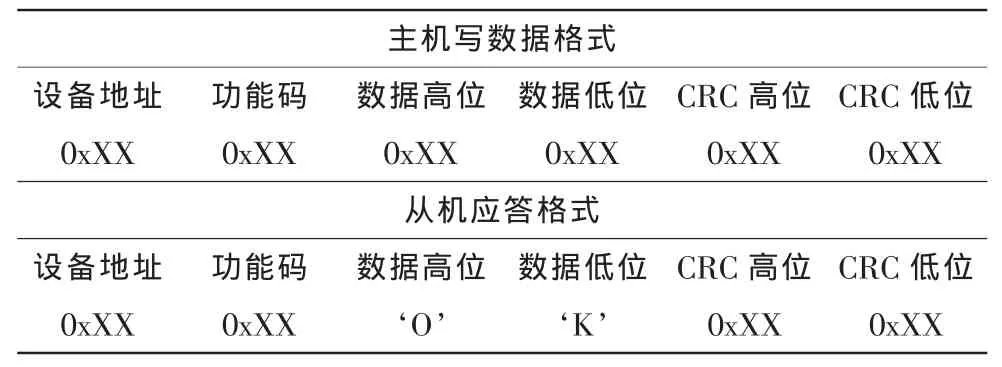
表1 报文格式Tab.1 Message format
数字PID控制器是基于连续系统的计算机数字模拟设计技术,将输入离散化后,用差分方程代替连续系统里的微分方程[5-6],采用比例(P)、积分(I)和微分(D)的方式进行控制,PID控制算法的微分方程表达式为:

式中:u(t)为调节器的输出信号;e(t)为调节器的偏差信号;Kp为调节器的比例系数;τ0为调节器的积分时间常数;τd为调节器的微分时间常数。
离散化后的差分方程为:

式中:Ts为采样周期;n 以为采样序号,n=0,1,2,…;u(n)为第n次采样时计的输出;e(n)为第n次采样时的偏差值。
通过MSP430单片机,实现全数字化PID闭环控制后,可以方便的对参数进行调整,可靠性高,能够实现无静差调速。
3 系统性能指标与测试实验
变形轮机器人巧妙地结合了轮式移动方式速度快效率高和爪式爬行方式越障能力强的优点。可基于任务需求和操纵者偏好安装机械臂、摄像机等功能模块,代替人员在危险环境中执行侦察、排险等任务,大幅降低人员伤亡与工作强度,还可视情况加挂拖曳担架模块执行运送伤员任务。主要设计技术指标如表2所示。
注:电池续航能力及续航里程,为机器人携带两块标配锂电池,速度5 km/h时参数。
实验环境为野外空旷场地,模拟各种型态的路面,验证控制系统的可行性与有效性,图6所示为机器人跨越台阶和通过废墟。试验中,机器人每隔1 s,回传一次信息,实现了周围环境感知,变形轮侦察机器人能够执行控制规划指令,监控画面清晰稳定,在500 m的有效距离内顺利实现侦察救援任务。
4 结束语
本文以现场侦察为背景,分析了机器人的功能需求,在确定机械结构的基础上完成了控制系统的设计,该系统运行安全稳定,可实时回传视频,具备多通道的感知能力,遥控终端显示界面简洁直观,操作简便,为机器人执行复杂环境下的侦察任务提供了保证。

表2 技术指标Tab.2 Technical specifications
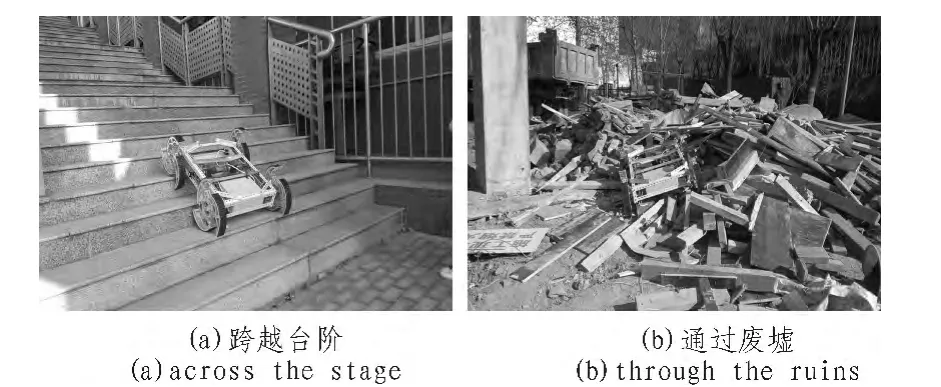
图6 测试实验Fig.6 The experiment
[1]王田苗.全力推进我国机器人技术[J].机器人技术与应用,2007(2):17-23.WANG Shu-miao.To promote the robot technology in China[J].Robot Technique and Application,2007(2):17-23.
[2]王明辉,马书根,李斌,等.可重构机器人体系结构及模块化控制系统的实现[J].仪器仪表学报,2006,27(10):1176-1182.WANG Ming-hui,MA Shu-gen,LI Bin,et al.Control architecture and implementation of modularized control system for RPRS[J].Chinese Journal of Scientific Instrument,2006,27(10):1176-1182.
[3]黄志华,屠大维,赵其杰.基于人机交互的移动服务机器人导航系统[J].机器人,2009,31(3):248-253.HUANG Zhi-hua,TU Da-wei,ZHAO Qi-jie.A human-robotinteraction-basednavigation system for mobile service robot[J].Robot,2009,31(3):248-253.
[4]杨乐平,李海涛.LabVlEW程序设计与应用[M].北京:电子工业出版社,2005.
[5]晁盛远,王凯,刘富勇.无刷直流电机的建模与仿真[J].计算技术与自动化,2008,27(2):39-43.CHAO Sheng-yuan,WANG Kai,LIU Fu-yong.Modeling and simulation of brushless DC motor system[J].Computing Technology And Automation,2008,27(2):39-43.
[6]邱立军,宋超,王晶,等.无刷直流电机控制系统的建模及仿真[J].海军航空工程学院学报,2008,23(4):415-418.QIU Li-jun,SONG Chao,WANG Jing,et al.Modeling and simulation of the brushless DC motor control system[J].Journal of Naval Aeronautical and Astronautical University,2008,23(4):415-418.
