激光跟踪仪光电跟踪伺服控制系统设计
2015-06-07刘娇月杨聚庆董登峰
刘娇月, 杨聚庆, 董登峰
(1.河南工业职业技术学院,河南 南阳 473009;2.北京工业大学 应用数理学院,北京 100124;3. 中国科学院 光电研究院,北京 100094)
激光跟踪仪光电跟踪伺服控制系统设计
刘娇月1, 杨聚庆2,3, 董登峰3
(1.河南工业职业技术学院,河南 南阳 473009;2.北京工业大学 应用数理学院,北京 100124;3. 中国科学院 光电研究院,北京 100094)

针对激光跟踪仪光电跟踪伺服控制系统高精度、快速、实时等使用性能要求,分析了光电跟踪伺服系统的结构方案与功能组成,提出了电流、速度和位置“三环反馈+模糊校正”的控制结构,设计了模糊 PID 控制算法,进行了电机、伺服器、圆光栅、DSP等关键部件选型设计。经过实际样机跟踪性能测试,随机动态跟踪性能良好,系统测试最大角加速度超过200°/s2,跟踪角速度达到40°/s,跟踪仪速度闭环带宽≥23 Hz。测试结果表明,系统动态跟踪性能达到设计指标要求。
光电跟踪; 伺服控制; 模糊控制
0 引 言
光电跟踪伺服控制是空间目标动态跟踪测量的关键技术,随着光电跟踪技术应用范围的不断扩展,对其跟踪精度的要求也越来越高。激光跟踪仪的测量高精度、快速、实时等使用性能要求控制器具备快速响应能力、高稳定性、强鲁棒性以及对参数变化的自适应能力[1]。跟踪伺服系统通常具有很强的非线性和不确定性,在传统控制系统中,通过提高增益或增加积分环节,来提高跟踪精度或者保持系统稳定性,两者是相互矛盾的[2]。因此,既能大幅提高跟踪精度,又能保持系统稳定性的光电伺服控制成为高精度跟踪控制技术发展的趋势。
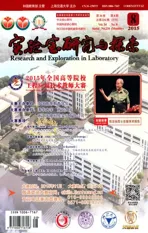
激光跟踪仪测量对象具有典型的空间随动目标特性,为了实现对空间动态目标的跟踪测量,需要激光跟踪仪能实时精确地测出动态目标位置的相对变化量,并通过跟踪控制单元对反射转镜的俯仰方位角进行高速伺服控制,以保证测量光束始终瞄准和快速跟踪空间运动目标中心,实现对大范围远距离运动目标的实时跟踪和精密测量[3]。跟踪控制系统应具有响应速度快、无静态误差、跟踪误差小、工作平稳、工作可靠等性能。系统工作过程如图1所示。
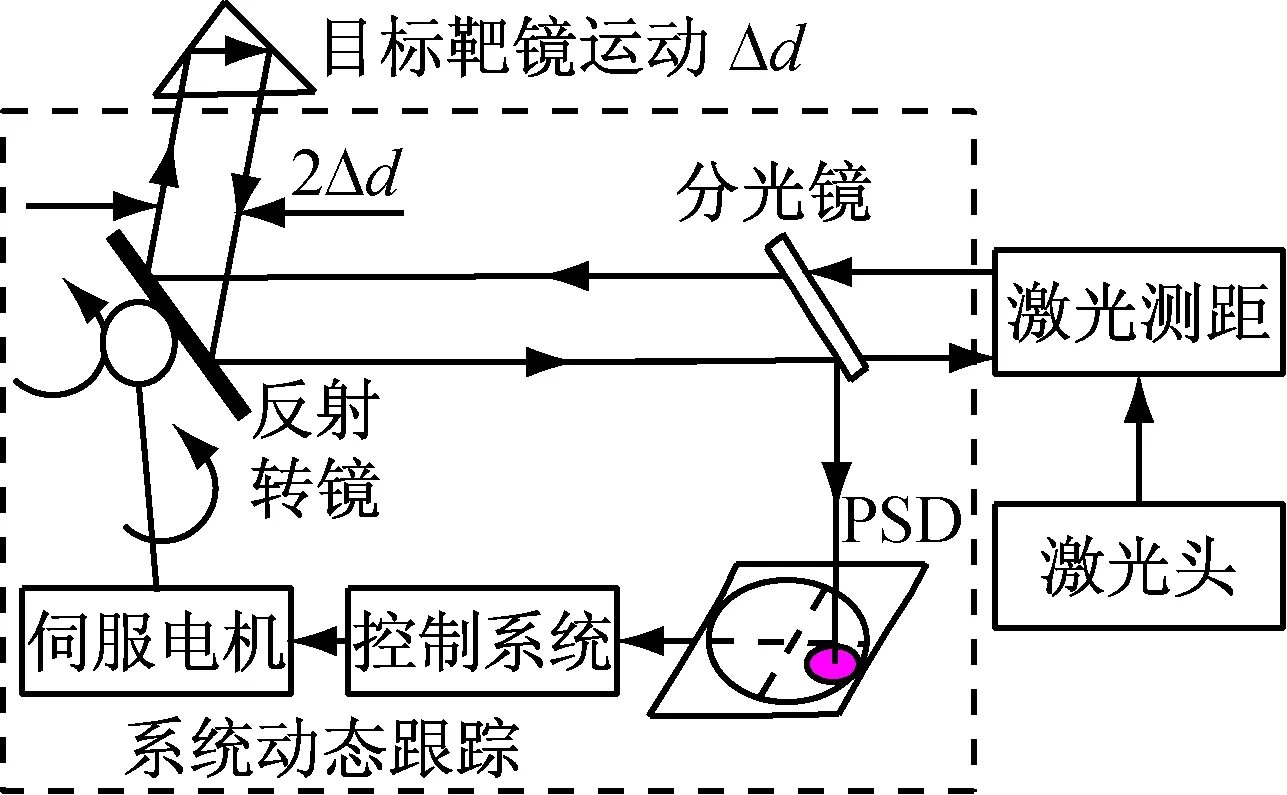
图1 系统跟踪过程示意图
激光跟踪仪用于超大尺寸空间几何量测量及动态轨迹测量,是大型科学工程和大型高端装备制造中急需的测量装备[4]。2009年中科院光电研究院联合多家单位在国内率先开始激光跟踪仪研制工作,目前已经完成样机测试。本课题依托该激光跟踪仪样机研制,对光电跟踪伺服控制单元进行了技术研究与应用设计[1]。
1 系统组成与分析
激光跟踪仪光电跟踪伺服控制实质上是一个位置随动控制系统,要求系统对输入信号的响应具有快速性、灵活性及准确性。目标靶镜运动轨迹是动态变化的,因此系统具有一定的随机性。如何保证出射激光束在随机运动状态下,能够快速、准确地指向靶镜中心,是控制系统要解决的核心问题。
本设计通过检测激光斑在PSD探测器的偏移量,结合目标距离以及方位、俯仰角度等信息,采用闭环混合跟踪控制算法,输出控制量,驱动方位和俯仰电机,将出射激光束始终指向靶镜的中心区域,为整个系统对目标靶镜的坐标测量提供技术保证。
系统主要包括安装在二维跟踪转台上的方位和俯仰电机、跟踪反射镜、伺服控制驱动器、圆光栅、DSP控制与通信模块以及相关控制算法和软件。
伺服控制结构、控制算法、圆光栅测角精度是影响系统控制精度和快速跟踪能力的关键要素。快速跟踪意味着系统动态响应要快,过渡过程要短,系统带宽要宽;高控制精度意味着系统稳态误差要小,两者之间具有矛盾。快速响应可能引入系统超调,宽带宽势必引入高频噪声,降低系统稳定裕度,从而影响控制精度。传统的光电跟踪伺服控制大都采用频率特性和PID控制算法,当控制环境发生变化以及目标状态发生突变时,系统控制误差明显增大,甚至无法保证正常跟踪。设计采用模糊控制PID算法,既能够体现模糊控制器鲁棒性好、抗干扰能力强、动态性能好的优点,又能够发挥PID调节器稳态精度高的优点[5]。
DSP控制与通信模块是实现整个系统数据实时处理的核心,其主要功能是数据采集单元的跨时钟通信、上位机TCP/IP通信、电机驱动模块CANOPEN通信控制、跟踪控制算法及其他相关数据的处理与运算[6-7]。
电机是伺服控制系统的直接控制对象,通过对电机的控制实现对跟踪镜转角的控制。力矩电机具有转速低、力矩大、力矩波动小、输出转矩大、线性度好等优点,本设计采用直流力矩电机作为驱动元件。电机伺服控制包括方位和俯仰两套系统,结构基本相同[8]。
2 伺服控制结构与算法设计
2.1 伺服控制回路结构
伺服控制采用电流、速度和位置三环反馈控制结构,设计3个调节器,分别调节位置环、速度环和电流环。位置环伺服控制系统闭环结构如图2所示。

图2 跟踪伺服闭环控制系统框图
电流环用于提高系统刚性加快系统响应,改善转矩控制的线性度,使系统能作到恒流启停,限制启动电流和堵转电流超过电机电流的最大允许值。按二阶负反馈系统设计电流环调节器 ACR,将阻尼比取为ξ=0.707左右,这样可使其跟随性能好、超调量小。
速度环用来抑制系统的干扰,减小直流电动机的惯性,改善系统线性度,由园光栅微分后提供速度反馈信号。速度环调节器ASR按典II系统设计成PI,按最大相角裕量准则确定调节器参数,使之成为三阶最佳系统。
位置环用于保证精度,提高系统的跟随性能,实现伺服位置控制。通过对电机的转角(速度)控制,实时改变跟踪镜的方位和俯仰角,跟踪测量光束移动,消除对心入射目标镜位置偏移,即Δd→0(见图1)。位置环引入数字模糊处理校正环节,构成位置校正网络。充分利用模糊控制对系统的输入响应快、过渡过程短和对参数不敏感的特性,使系统既有较高的控制精度,又有快速捕获目标的能力,以实现更好的控制效果。位置回路校正量经放大后进入速度环,驱动力矩电机,拖动方位和俯仰轴跟踪目标。
位置控制输入信号来自PSD光电探测单元脱靶量信号。分析计算表明,位置环的开环增益与光束在跟踪镜上的反射点到目标镜的距离L成正比。由于系统工作过程中随目标点位置的变化而变化,因此导致位置环的开环增益也随之变化。增益过大,系统就不稳定;增益过小,跟踪力量就差,跟踪误差越大。为改进这一不足,引入实际测量距离值对开环增益进行实时校正。实时位置反馈信号由圆光栅经过细分、滤波处理后得到。
2.2 伺服控制算法
最后,要能满足生活可以自理、半自理和不能自理医疗护理服务。完善的后期服务,包括为老年人提供管家式服务、医护服务、保健服务、活动组织、日常课程、特殊饮食护理服务等。
采用增量式PID的控制算法,输出数字控制信号为:
Δu(k)=KP[e(k)-e(k-1)]+KIe(k)+KD[e(k)-2e(k-1)+e(k-2)]
(1)
式中:KP为比例增益;KI=T/TI为积分系数;KD=KPTD/T为微分常数。为了便于实现数字化采样程序编写,将公式整理为:
(2)
式中:
模糊PID控制器的结构框图如图3所示。它是以误差e和误差变化率ec为输入的二维模糊控制器。根据不同时刻的e和ec,按照事先确定的模糊控制规则,完成PID控制器3个参数kp、ki、kd的在线自整定,并输入PID控制器进行校正。
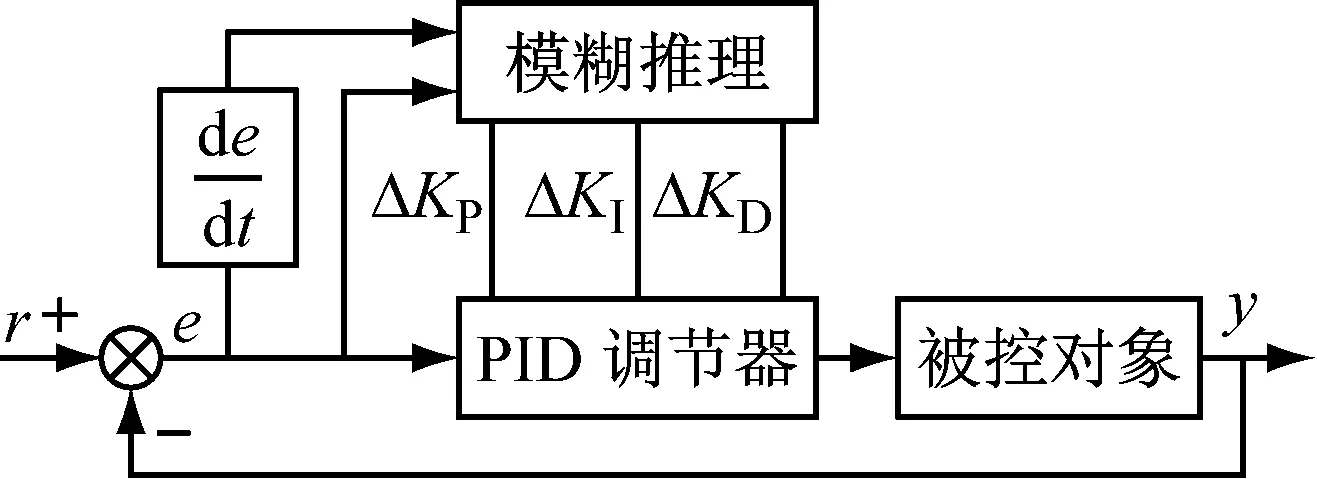
图3 模糊PID控制器结构
位置环调节器进行跟踪控制时,首先采样某时刻系统位置误差值e(k),并计算出误差变化率ec(k),经模糊量化后,求出各模糊子集的隶属度,再根据模糊控制规则,应用最大最小合成法进行模糊推理,得到Δkp、Δki、Δkd各语言值对应的隶属度,最后用加权平均法进行解模糊运算,就可以得到PID控制器修正参数的精确值, PID控制器调整参数计算公式为[9-10]:
(3)
式中:KP(k)、KI(k)和KD(k)为k时刻PID控制器的参数值;KP(k-1)、KI(k-1)和KD(k-1)为k-1时刻PID控制器的参数值,也是k时刻PID控制器参数的待整定值。
3 硬件选型设计
根据结构设计,俯仰轴转动部分质量1.5 kg,转动惯量1 230 kg·mm2,俯仰加速度20 rad/s2,驱动电机力矩为0.024 6 N·m,设计考虑10倍力矩储备,电机驱动力矩最小为0.25 N·m。俯仰驱动电机选用上海微电机研究所的J75LYX03型力矩电机,电机峰值堵转力矩为1.4 N·m,连续堵转力矩为0.6 N·m,电机外径为75 mm,空载转速为650 r/min。
同样,方位转动部分质量6.2 kg,转动惯量为17 614 kg·mm2,俯仰加速度为20 rad/s2,驱动电机力矩为0.36 N·m,设计考虑5倍力矩储备,电机驱动力矩最小为1.8 N·m。方位驱动电机选用上海微电机研究所的J92LYX04型力矩电机,电机峰值堵转力矩为1.5 N·m,连续堵转力矩为0.8 N·m,电机外径为92 mm,空载转速为500 r/min。
电机驱动器选用英国Copley公司Accelnet系列数字驱动器。该数字驱动器具有增量式编码器反馈接口、高带宽的嵌入式控制环路、四阶限波或低通滤波器、高效率的动态 PWM和降低干扰的边缘滤波器[11-12]。
测角元件选用雷尼绍RESM系列高精度圆光栅,采用Renishaw新型DSi接口,安装2个SiGNUMTMSR读数头,输出一个具有高重复性的propo ZTM参考位置的信号,完全不受轴承偏移或动力循环的影响。采用DSi双读数头信号组合可消除偏心误差,剩余误差仅为刻划误差和周期误差(电子细分误差-SDE),都非常小。当RESM与DSi配用时,可实现优于±1.5 s的整体安装误差。根据测角精度和结构尺寸的要求,俯仰轴选用外径为100 mm的圆光栅,方位轴选用外径为150 mm的圆光栅[6-7]。
控制与通信模块以DSP芯片为核心,实时采集光电探测单元输出信号并将相关数据发送至上位机,进行相关控制算法计算,输出电机驱动器控制信号。设计选用TI公司DSP芯片TMS320F28335作为控制与通信模块的核心,TMS320F28335具有150 MHz的高速处理能力,32位浮点处理单元,18路PWM输出,12位16通道ADC,6个DMA通道支持ADC、McBSP和EMIF。支持CAN2.0A/B协议,能够与伺服电机驱动进行通信,能够外扩接口与TCP/IP网络协议芯片有机配合完成实时网络通信[13-15],设计选用了W5300网络协议芯片实现DSP与PC通信。
4 系统跟踪特性测试
对样机光电跟踪特性进行测试,实验环境为室内夜晚。
初始校准后,人手持目标靶球,距离跟踪仪1 m以上。测试人随意摆动目标靶球,使得靶球的空间运动轨迹具有比较大的随机性,上位机接收跟踪仪输出的位移信号数据。测试过程中未出现丢光现象,跟踪效果较好。目标靶球的三维运动轨迹测试曲线如图4所示。

图4 靶球三维运动轨迹
在靶球距离激光跟踪仪2.7~2.8 m的情况下,跟踪仪方位角速度、角加速度测试曲线如图5、6所示,图7为靶球距离曲线。

图5 角速度曲线
图6 角加速度曲线
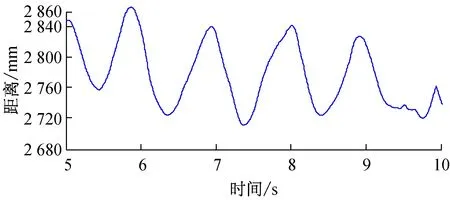
图7 靶球距离变化曲线
5 结 语
从系统跟踪测试数据中可以看出,在靶球移动的(线)速度≤1 m/s时,跟踪仪跟踪性能良好。系统设计最大工作角加速度为120°/s2,工作角速度60°/s,测试环境下跟踪角加速度超过200°/s2,跟踪角速度达到40°/s,跟踪仪速度闭环带宽≥23 Hz。测试结果表明系统指标满足使用需求。
[1] 周维虎,丁 蕾,王亚伟,等.光束平差在激光跟踪仪系统精度评定中的应用[J].光学精密工程,2012,20(4):851-856.
[2] 赵志诚,贾彦斌,张井岗.光电跟踪系统内模控制器的设计[J].光电工程,2005,32(1):27-30.
[3] 王彦喜,闵 俊,刘 刚.激光跟踪仪在飞机型架装配中的应用[J].航空制造技术, 2010(19):92-94, 97.
[4] 王孝坤.利用激光跟踪仪测量超长导轨直线度的方法[J].应用光学,2013,34(4):686-689.
[5] 王 健,曹秉刚,王 昆. 基于模糊 PID 控制的导引头角跟踪系统[J].系统仿真学报,2004,16(6):1330-1332.
[6] 侯宏录,周德云,王 伟,等.模糊PID 控制在光电跟踪控制系统中的应用[J].光电工程,2006,33(5):12-16.
[7] 高 科,孙晶华.光电探测器前置放大电路研究[J].微型机与应用,2011,30(18):86-88.
[8] 郇宝贵.便携式激光跟踪仪电控系统设计与实现[D].西安:西安工业大学,2012.
[9] 周维虎,费业泰,李百源,等.激光跟踪仪几何误差修正[J].仪器仪表学报,2002,23(1):56-63.
[10] 王秋平,左 玲,康 顺.光电跟踪系统非线性新息自适应卡尔曼滤波算法[J].光电工程,2011(2): 9-13.
[11] 安久伏.激光跟踪系统的硬件电路设计[D].天津:天津大学,2009.
[12] 覃 松,梁 庆.英国雷尼绍 RENISHAW 圆光栅测量原理及应用[J].轻工科技,2012(4):60,65.
[13] 贾 龙,林 岩.基于 DSP 和 FPGA 的高速数据采集系统的设计及实现[J].电子测量技术,2007(5):95-97.
[14] 周培松,卢荣胜,周维虎.四象限探测器用于激光跟踪仪目标脱靶量测量[J].光电技术应用,2014,29(1): 75-79.
[15] Baronti F, Lazzeri A, Roncella R,etal. FPGA/DSP-based implementation of a high-performance multi-channel counter[J]. Journal of System Architecture,2009,55(10): 310-316.
Design of Optoelectronic Tracking Servo Control System for Laser Tracker
LIUJiao-yue1,YANGJu-qing2,3,DONGDeng-feng3
(1. Henan Polytechnic Institute,Nanyang 473009,China; 2. Collage of Applied Science, Beijing University of Technology, Beijing 100124, China; 3. Academy of Opto-Electronics, Chinese Academy of Science, Beijing 100094, China)
For laser tracker photoelectric tracking servo control system’s performance requirements such as high precision, speediness and real-time, the paper analyzed photoelectric tracking servo control system’s structure scheme and function, put forward "three-ring feedback + fuzzy correction" control structures of current, speed and position, designed fuzzy PID control algorithm, selected suitable motors, servers, circular grating, DSP and other key components. Through actual prototype’s tracking performance test, the system’s stochastic dynamic tracking performance was fine, and the maximum angular acceleration could be more than 200 °/s2, angular velocity could be 40 °/s, the tracker’s speed closed loop bandwidth could be over 23 Hz. Test results showed that the system dynamic tracking performance had meet the requirements of design indexes.
optoelectronic tracking; servo control; fuzzy control
2014-12-25
中国科学院科研装备研制项目(090206A01Y);北京工业大学研究生科技基金项目(ykj-2014-11443);2015年度河南省高等学校重点科研项目指导计划(15B535002)
刘娇月(1974-),女,河南南阳人,副教授,主要从事精密仪器、机电一体化技术及其应用等。
Tel.:15838706952;E-mail:15838706952@139.com
杨聚庆(1972-),男,山西高平人,在读博士,副教授,主要研究方向为光电检测与控制及激光跟踪测量技术等。
Tel.:13949382065;E-mail:nyyjq@139.com
TP 216
A
1006-7167(2015)08-0064-04