基于货车车身悬架的最佳主动控制
2015-06-07潘公宇徐腾跃
潘公宇,徐腾跃,张 树,杨 海,杨 欣
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
基于货车车身悬架的最佳主动控制
潘公宇,徐腾跃,张 树,杨 海,杨 欣
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
建立了载货汽车5自由度模型,采用模糊控制方法对车身前后悬架进行主动控制。仿真结果表明,与一般的控制座椅悬架的控制方式相比,对车身悬架运用主动控制,不仅衰减座椅加速度,同时衰减了车身加速度。考虑减振性能和生产成本,对前、后悬架单独运用主动控制进行分析,得出了最佳的控制方案。
车辆工程;模糊控制;Simulink仿真;主动悬架;5自由度模型
0 引 言
载货汽车由于经常要担任长途运输的任务,恶劣的行驶平顺性,容易引起司机疲劳驾驶,并且可能损坏货物。随着经济的快速增长,运输市场需求的不断扩大,运输物品种类也越来越复杂,更多较精密的仪器需要被运输,这就需要在保证货车驾驶员座椅振动平稳的同时,也要保证车身拥有良好的减振性能,而一般的载货汽车对减小车身振动并不重视,往往只对驾驶员座椅进行主动控制,笔者对车身悬架进行主动控制,从而希望同时减轻驾驶员座椅及车身振动,并考虑生产成本,分析最佳的主动控制方案。
1 载货汽车5自由度模型的建立
车辆是非常复杂的多自由度系统,为了简化,对模型进行假设:汽车沿纵向中心线左右对称,路面是各向同性的各态历经随机过程;忽略除路面以外的其他振源和轮胎阻尼。
根据以上假设,选取了1/2车身悬架模型[1-2]和座椅模型相结合,建立了载货汽车5自由度模型,见图1。
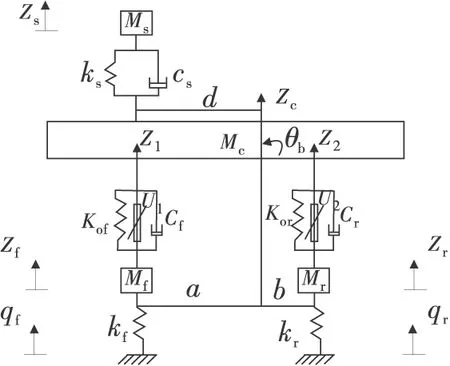
图1 载货汽车5自由度模型
图1中,qf,qr为前后轮路面输入;Zf,Zr为前后非簧载质量垂直位移;Mf,Mr为前后非簧载质量;kf,kr为前后悬架弹簧刚度;Cf,Cr为前后悬架阻尼系数;U1,U2为前后悬架主动控制力;Z1,Z2为前后悬架垂直位移;Zc为车身质心垂直位移;Mc为车身簧载总质量;θb为车身俯仰角;ks为座椅悬架弹簧刚度;Cs为座椅悬架阻尼系数;Ms为座椅质量;a,b为前后轴到质心的距离;d为座椅到质心的距离。其中:
Z1=Zc-a·sinθb≈Zc-a·θb
(1)
Z2=Zc+sinθb≈Zc+θb
(2)
根据模型间的力平衡关系,写出微分方程,并根据微分方程,化为状态空间方程[3],如式(3):
(3)
选取状态变量:
选取输出向量:
输出向量内的6个变量分别代表车身质心速度,座椅质心速度,座椅悬架动位移,车辆前悬架动位移,车辆后悬架动位移,车身俯仰角速度。
2 模糊控制器的设计
笔者选用了两个双输入单输出的模糊控制器。模糊控制器1选取车身前悬架速度e1及其加速度ec1作为模糊控制器的输入量,以车身前悬架主动控制力U1作为模糊控制器的输出量;模糊控制器2选取车身后悬架速度e2及其加速度ec2作为输入量,以车身后悬架主动控制力U2作为输出量。两个模糊控制器的输入输出变量均取7个语言值,分别为负大(NB)、负中(NM)、负小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PB),故可产生49条语言规则。e1和ec1的基本论域为[-0.8,0.8]和[-8,8],U1基本论域为[-4 000,4 000];e2和ec2的基本论域分别为[-0.8,0.8],[-6,6],U2基本论域为[-8 000,8 000]。隶属函数论域均为[-3,3];故量化因子分别取ke1=3.75,kec1=0.375,ke2=3.75,kec2=0.5,比例因子kU1=1 666.7,kU2=2 666.7;输入变量和输出变量的模糊子集采用三角形隶属函数[4-5]。
根据车身质心速度和加速度的变化情况,相应改变主动控制力U,从而设计出模糊控制规则,见表1。

表1 模糊控制规则
文中的模糊推理和去模糊化方法均采用Min-Max重心法。
3 系统仿真参数设定及结果分析
3.1 路面谱的确定
笔者采用B级路面谱,其时域数学模型[6-7]见式(4):
q(t)′+αvq(t)=w(t)
(4)
式中:q(t)为车轮所受的路面随机激励;α为路面不平度系数;v为汽车前进速度;w(t)为高斯白噪声。
在此假设车速v=50 km/h,α=0.14。后轮相对于前轮路面不平度激励滞后一段时间τ:
τ=(a+b)/v
(5)
3.2 基于MATLAB/Simulink的模型建立和仿真分析
在MATLAB/Simulink环境下搭建模型,主动控制整体模型如图2。
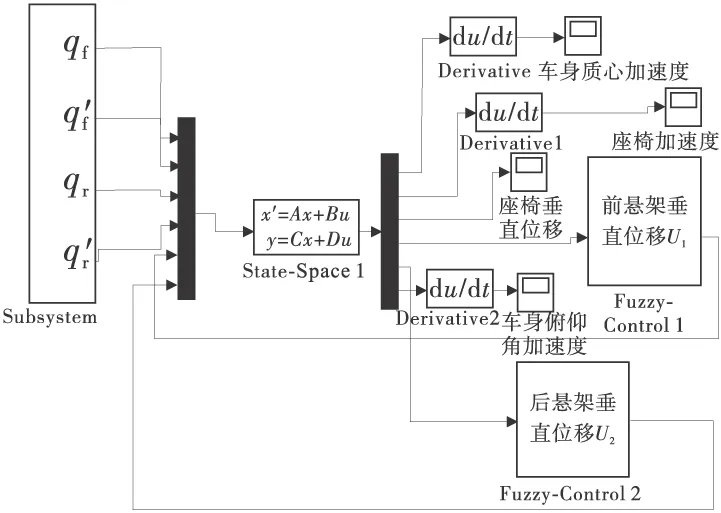
图2 在Simulink环境下的主动控制仿真
在Simulink环境中进行仿真模拟,得到被动悬架与主动悬架各性能曲线的对比图,见图3。
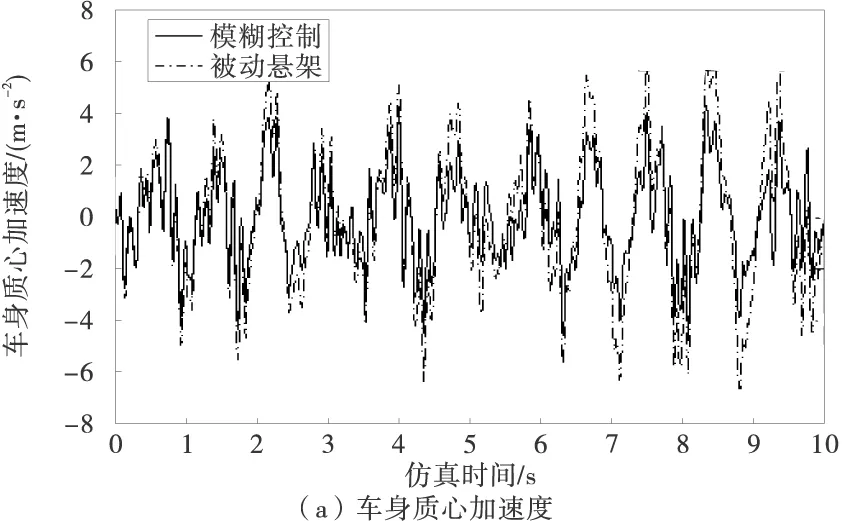
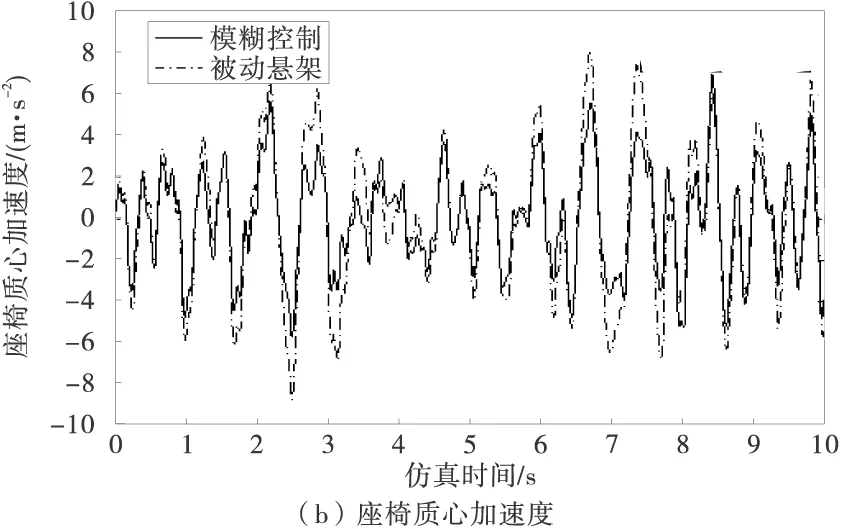
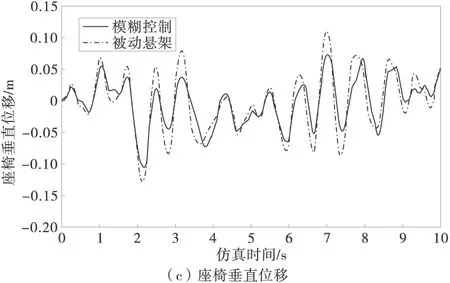
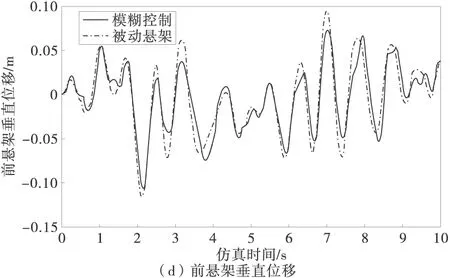
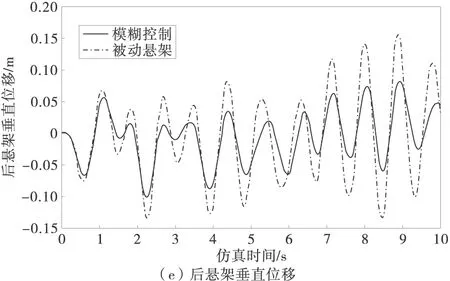

图3 被动悬架与主动悬架各性能曲线的对比
由表2可知,对车身前后悬架同时进行主动控制,模型的车身质心加速度,座椅加速度,车身前后悬架垂直位移,座椅位移,车身俯仰角加速度性能相比被动悬架都有明显改善,车辆的乘坐舒适性和平顺性都有显著提高[8-9],故不考虑生产成本,对前后悬架同时进行主动控制的方法是行之有效的。

表2 主、被动悬架均方根值对比
3.3 前、后悬架单独控制分析
考虑到主动悬架造价昂贵,设想如对前后悬架单独运用主动控制而效果可行,可大大减少生产成本,故在此对车身前、后悬架单独使用主动控制进行分析,并将其性能指标与前后悬架同时进行主动控制的性能指标进行对比,结果见表3。
由仿真结果及表3,再结合表2可以清楚地发现,对车身前后悬架单独进行主动控制后,减振效果要比同时对前后悬架进行主动控制的减振效果有不同程度的降低。具体来讲,单独对前悬架进行主动控制,由于车辆座椅靠近前悬架上方,导致座椅质心加速度、座椅垂直位移及车身前悬架垂直位移较之同时对前后悬架进行主动控制,其减振效果基本不变,而车身质心加速度、车身俯仰角加速度及车身后悬架垂直位移的减振效果都有不同程度的降低;单独对后悬架进行主动控制,其车身俯仰角加速度、座椅质心加速度、座椅垂直位移的减振效果都有不同程度的降低,对座椅的振动衰减效果几乎为0,只有车身质心加速度和车身后悬架垂直位移的减振效果变化不大。综上所述,对前悬架进行主动控制,着重提高驾驶员乘坐舒适性;对后悬架进行主动控制,着重提高车身振动平顺性,据此,根据不同的情况需求,可以选择不同的控制方式,达到可行的效果。
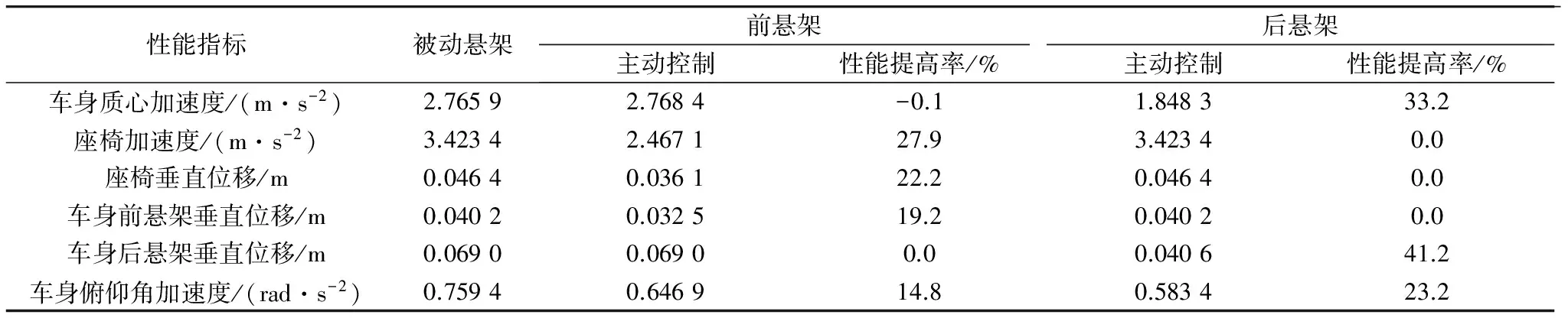
表3 前、后悬架主动与被动悬架指标均方根值对比
4 结 论
1)相较于被动悬架,采用模糊控制的主动悬架的整车性能得到了很大的提高,证明了控制策略的可行性与实用性。
2)对车身悬架采取主动控制,比起直接对座椅悬架进行主动控制,既衰减了车身振动,同时也衰减了座椅振动,是一种效果明显的控制方式。
3)经过仿真分析,对车身前悬架单独进行主动控制,仍能有效控制驾驶员座椅振动,但车身振动得不到有效控制;对车身后悬架单独进行主动控制,车身振动能得到有效控制,而座椅振动较大。因此,针对不同的减振目的,可选取不同的控制方案,以达到性价比最高的方法。
[1] 余志生.汽车理论[M].4版.北京:机械工业出版社,2006. Yu Zhisheng.Automobile Theory [M].4thed.Beijing:China Machine Press,2006.
[2] 刘惟信.汽车设计[M].北京:清华大学出版社,2001. Liu Weixin.Automobile Design [M].Beijing:Tsinghua University Press,2001.
[3] 于长官.现代控制理论[M].哈尔滨:哈尔滨工业大学出版社,1997. Yu Changguan.Modern Control Theory [M].Harbin:Harbin Institute of Technology Press,1997.
[4] 石辛民.模糊控制及其MATLAB仿真[M].北京:清华大学出版社,2008. Shi Xinmin.Fuzzy Control and Simulation [M].Beijing:Tsinghua University Press,2008.
[5] 余强,魏朗,陈荫三.主动悬架系统的连续模糊控制[J].汽车技术,1999,30(1):9-12. Yu Qiang,Wei Lang,Chen Yinsan.The continuous fuzzy control on active suspension [J].Automotive Engineering,1999,30(1):9-12
[6] 潘公宇,聂秀伟,陈立付,等.七自由度主动空气悬架最优控制的研究[J].机械设计与制造,2012(2):97-99. Pan Gongyu,Nie Xiuwei,Chen Lifu,et al.Study on optimal control of 7-DOF active air suspension [J].Machinery Design & Manufacture,2012(2):97-99.
[7] 潘公宇,黄宇.预瞄信息空气悬架汽车在加速/制动工况下的LQG控制[J].重庆交通大学学报:自然科学版,2012,31(2):321-325. Pan Gongyu,Huang Yu.LQG control of acceleration/braking System based on wheelbase preview [J].Journal of Chongqing Jiaotong University:Natural Science,2012,31(2):321-325.
[8] 刘伟,刘大维,陈焕明,等.基于联合仿真的半主动悬架车辆行驶平顺性研究[J].农业机械学报,2009,40(6):16-22. Liu Wei,Liu Dawei,Chen Huanming,et al.Ride comfort of MR-damper semi-active suspension systems based on co-simulations [J].Journal of Agricultural Machinery,2009,40(6):16-22.
[9] 郑兆昌.机械振动(中册)[M].北京:机械工业出版社,1986. Zheng Zhaochang.Mechanical Vibration:Vol Ⅱ [M].Beijing:China Machine Press,1986.
Optimal Active Control Based on Truck’s Body Suspension
Pan Gongyu, Xu Tengyue, Zhang Shu, Yang Hai, Yang Xin
(School of Automobile & Traffic Engineering, Jiangsu University, Zhenjiang 212013, Jiangsu, China)
A 5-DOF truck dynamic model was built up, and the active control was used in the front and back suspension which was based on fuzzy control. The simulation result shows that compared with the usual method of control which controls the suspension of the seat, the method which controls the body’s suspension can not only reduce the seat’s vibration, but also reduce the body’s vibration. Considering the effect of reducing vibration and production cost, the analysis on front and back suspension was carried out separately by using the active control, and the best control method was also obtained.
vehicle engineering; fuzzy-control; simulation of Simulink; active suspension; 5-DOF model
10.3969/j.issn.1674-0696.2015.04.28
2013-04-22;
2013-08-26
潘公宇(1965—),男,江苏镇江人,教授,主要从事车辆振动控制方面的研究。E-mail:774513912@qq.com。
U463.3
A
1674-0696(2015)04-143-04
