基于以太网的无位置无刷直流电机系统设计
2015-06-07吴爱国刘玉明
张 兴,吴爱国,刘玉明,王 硕
(天津大学电气与自动化工程学院,天津 300072)
基于以太网的无位置无刷直流电机系统设计
张 兴,吴爱国,刘玉明,王 硕
(天津大学电气与自动化工程学院,天津 300072)
设计了基于以太网的无位置传感器无刷直流电机反电动势过零检测电路,能够实现对反电动势过零信号的准确检测。控制器还通过以太网总线实现与远程计算机高速通信。文中详细介绍了以太网控制器RTL8019AS在电机速度等数据传输上的应用,给出以太网通信模块的软、硬件设计,最后进行试验测试,验证了系统运行与通信方面的可靠性与稳定性。
无刷直流电机;反电动势法;过零检测;以太网
0 引言
近年来,人们越来越关注无位置传感器控制技术在无刷直流电机方面的应用。无位置传感器控制技术实质是为了省去霍尔位置传感器,从主电路的信号中提取出转子位置信息。这里研制的无刷直流电机无位置传感器控制系统基于反电动势法设计了新型过零检测电路,并采用以太网控制器RTL8019AS,在远程PC机和现场控制设备间进行相互通信。现场控制层与管理层完成了全方位的无缝信息集成,让电机控制领域引入现有局域网最通用的通信协议以太网技术成为了可能[1]。基于以太网的无位置传感器无刷直流电机控制系统框架图如图1所示。
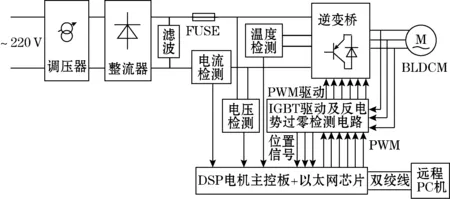
图1 无位置传感器无刷直流电机控制系统框架图
1 反电动势过零检测电路设计
无刷直流电机三相绕组端电压信号中载有很多相对于反电动势频率而言为高频信号的PWM斩波干扰信号,为了精确检测到反电动势过零信号来滤除高频干扰信号,有必要设计相关的低通滤波器,滤波器性能受反电动势过零点的精度影响。通常来讲,低通滤波器的设计原理为不会因为滤波过深而引起输入波形信号失真,也能切实滤除高频PWM干扰信号。由于电路各芯片的工作电压为小电压,而三相绕组端电压数值相比之下非常大,因此这里采用分压电路将三相绕组端电压信号衰减,并用一阶无源低通滤波器作为相应的低通滤波器[2]。反电动势过零检测硬件电路实现如图2所示,以A相为例,Uao是三相绕组端电压信号,R11、R12、R13、R14、R15、R21串联与R16分压,一阶低通滤波器由C2和分压电路组成,将高频PWM干扰信号除掉。
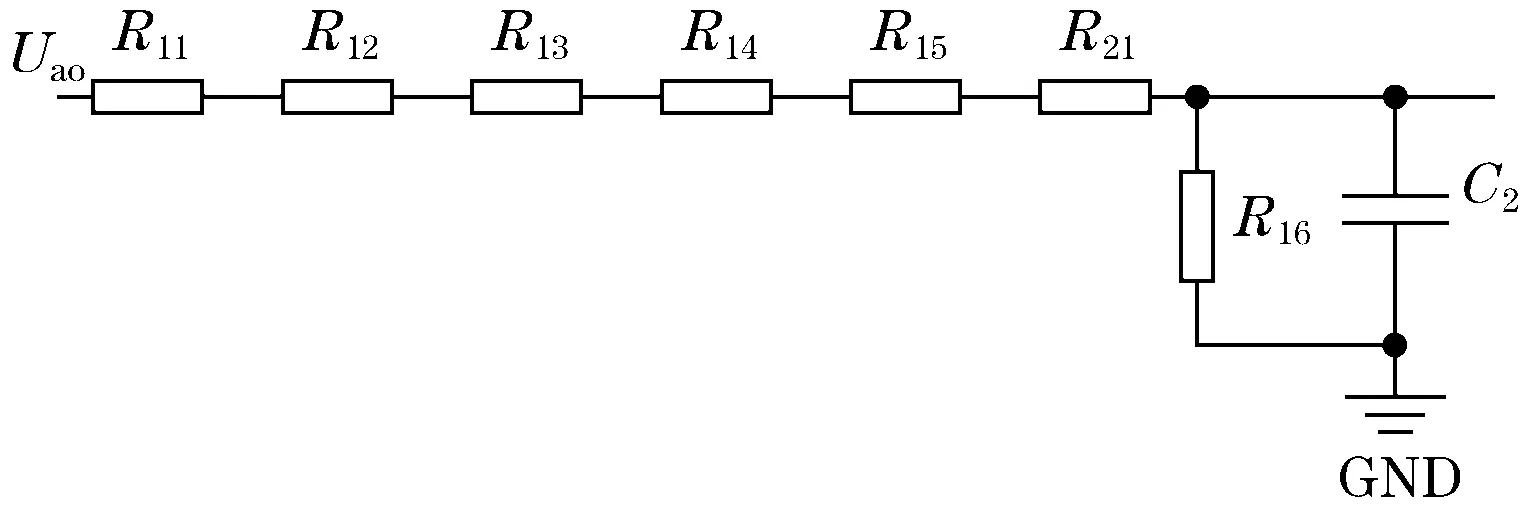
图2 端电压调理电路
三相绕组端电压信号和中性点电压信号经过滤波后进入电压比较器,能够产生反应转子位置信息的数字信号UA、UB、UC,这3个随反电动势过零点信号而发生跳变的数字信号通过光耦TLP117隔离后最终进入DSP的CAP捕获端口,如图3所示。
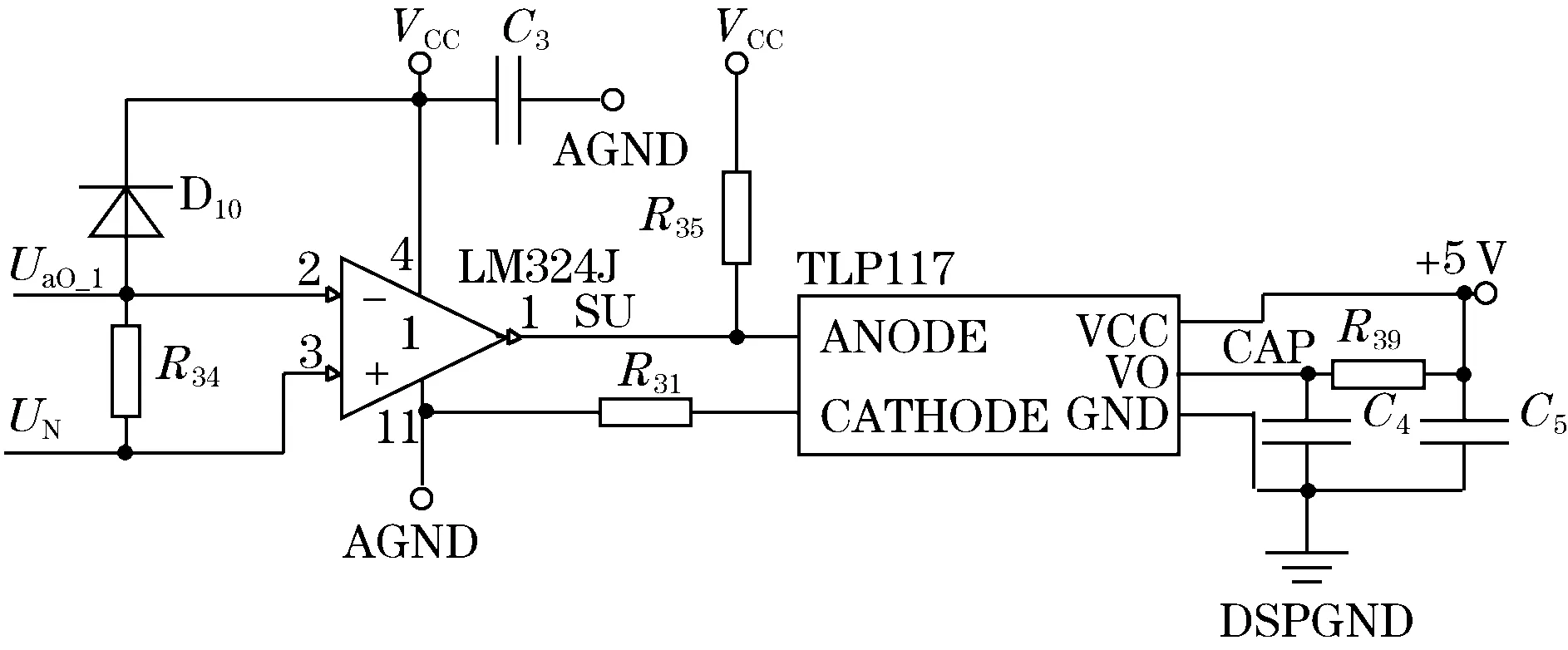
图3 过零点比较电路
2 工业以太网接口的设计
2.1 以太网通信模块功能
以太网控制器和远程PC机之间的远程通信的TCP/ IP协议栈,是保证数据传输的准确性的基础。DSP与无刷直流电机形成闭环控制系统,完成无位置控制算法、PWM脉冲输出等功能。嵌入式以太网接口由DSP TMS320F2812和以太网控制器RTL8019AS构成,DSP负责控制算法实现,相关数据被以太网控制器RTL8019发送至以太网或从以太网接收[3]。以太网控制器芯片RTL8019AS将由DSP产生的电机的速度等电机的状态信息经计算、滤波后传送到以太网接口RJ45,再驱动路由器连接至互联网,通过互联网访问控制器在浏览器中输入IP地址即可。远程PC机负责整个控制系统的控制与监测,设定转速并控制电机启停,获取运行实时状态信息,并保存现场数据信息,访问监控数据库。
2.2 RTL8019AS以太网控制器特点
RTL8019AS作为以太网控制器,其特点包括:收发同时达到10 Mbit/s;支持UTP,AUI、BNC、自动检测,带有即插即用功能,符合Ethernet II和EEE802.3标准;为减少对主处理器的要求,内部设有16K字的用于发送和接收的SRAM缓冲器;支持8/16位数据总线;带有即插即用等功能,还能够自动极性修正IOBaseT拓扑结构。此外,RTL8019AS提供TQFP封装,减少了PCB面积。
2.3 以太接口硬件电路设计
DSP TMS320F2812通过对寄存器编程实现对RTL8019AS的控制,这里仅用5根地址线与RTL8019AS相连。RTL8019AS芯片选定在跳线模式下工作。由于DSP的I/O空间与程序数据空间的地址区域相同,须使用TMS320F2812的控制信号读写RTL8019AS寄存器。TMS320F2812的读/写速度很快,实际上 RTL8019AS的 16 位数据线SD0~SD15可直接与 TMS320F2812 的 16 位数据线XD0~XD15相接,配合DSP TMS320F2812输出的地址信号方便读写[4]。此外,为实现以太网接口,采用双绞线作为以太网传输介质,将RTL8019AS的TPOUT与TPIN引脚通过专用隔离变压器20FOO1N接至RJ45插座。双绞线驱动/接收芯片20F001N是连接RTL8019AS和RJ-45的芯片,内部设有2个传输变压器[5]。它的TPOUT+,TPOUT-,TPIN+和TPIN-引脚分别对应接RTL8019AS的TPOUT+,TPOUT-,TPIN+和TPIN-引脚;它的TPRX+,TPRX-,TPTX+和TPTX-引脚分别与RJ-45接口的RX+-,TX+-端相连[6]。RTL8019AS接口图如图4所示。
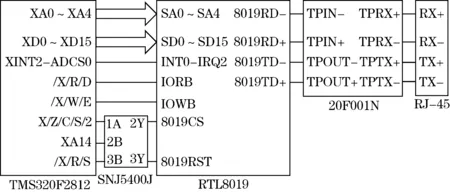
图4 RTL8019AS接口图
2.4 以太网通信模块软件设计
以太网通讯软件设计遵从模块化设计方案,主要模块包括初始化和通讯控制。
(1)初始化模块,主要包括以太网控制器RTL8019AS的驱动程序和TCP/IP协议栈定义2部分。常用的TCP/ IP协议因繁琐冗杂的特点使得很多DSP资源会被占用,不宜在DSP上直接应用,所以有必要编写1个精简的TCP/ IP协议栈。当电机通过DSP实现启停、调速等控制时,会产生相关数据信息并由RTL8019传递到双绞线中去,最终被反应到远程PC机上来。这些信号依次经过TCP/ IP协议栈的各个层传递,并在每层上加上自己独有的控制信息。
(2)控制模块,指网络通信及控制部分,即产生相关控制信号并通过网络传输给远程PC机。本文首先采用反电动势法进行无位置传感器双闭环控制,此后电机控制系统将发送一些事件触发的信息,如通过TCP协议传送电机的开机、关机等指令。而其他周期性信息,如定时将电机的转速等信息利用UDP协议发送给远程控制计算机[7]。
系统工作在服务器/客户端模式,DSP控制器作为服务器端,远程PC机作为客户端,采用循环工作方式,完成数据发送和接收。JAVA脚本语言用来编写远程PC机程序,从以太网总线获得电机信息状态,并实时刷新网页。此外,还根据运行状态、故障诊断与处理等,通过总线驱动继电器组中的相应继电器,向电机DSP控制器发送启停、调节转速等操作指令[8]。软件流程图如图5所示。
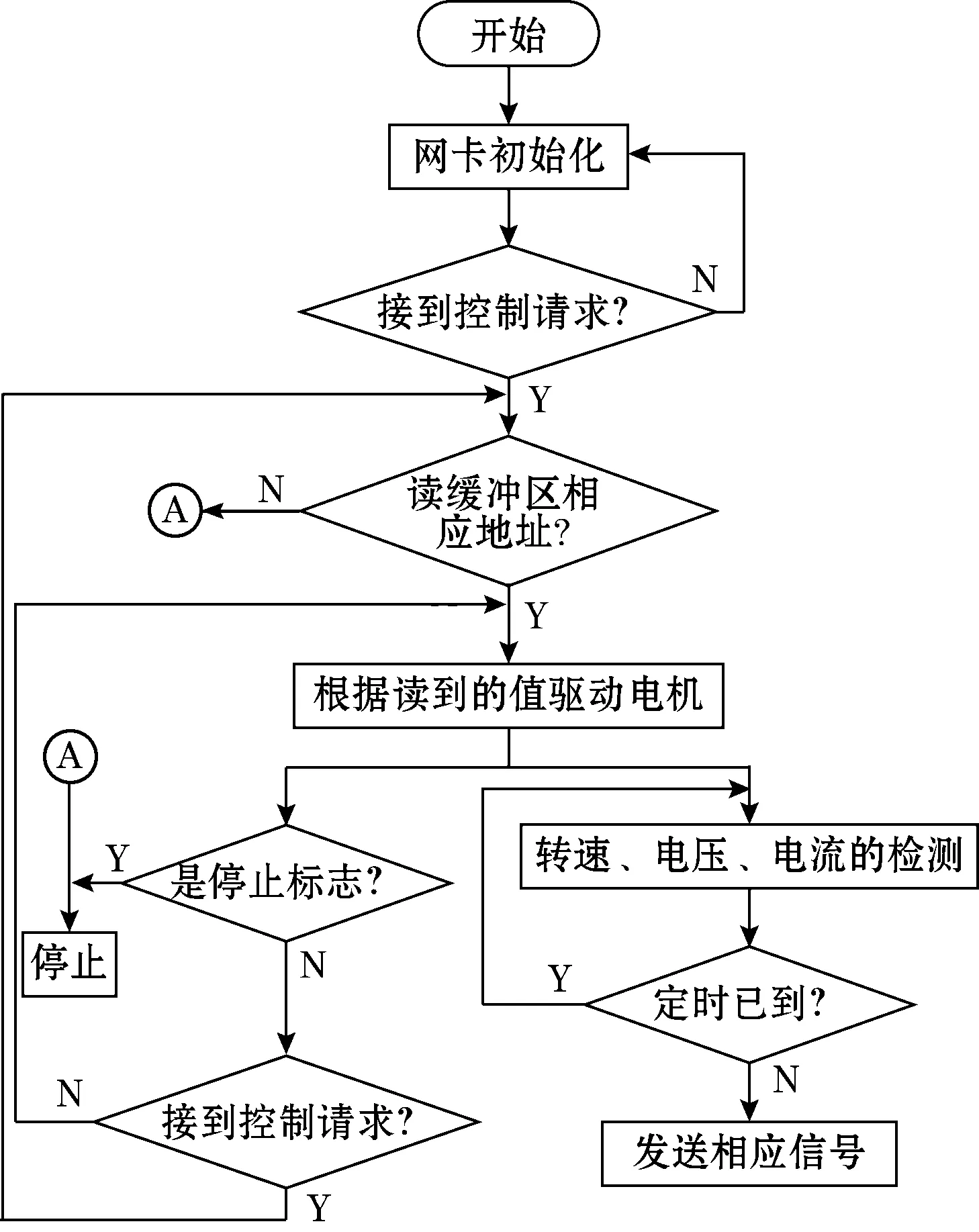
图5 通信模块软件流程图
3 精简TCP/IP协议栈的具体实现
在初始化模块中,需要精简TCP/IP协议栈。首先,数据由应用层向下传输,在传输层加上UDP首部形成UDP报文。然后,由传输层继续向下传输,在网络层加上IP首部形成IP数据包。最后,网络层继续向下传输,在链路层构成以太网帧进行传输[9]。数据协议封装如图6所示。
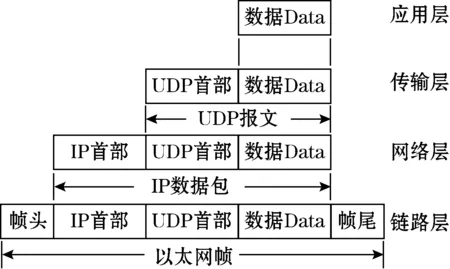
图6 数据协议封装示意图
首先,传输层用到TCP协议和UDP协议。以UDP为例,实时性高的数据常用UDP协议传输,如电机周期性速度信号。以下程序为UDP首部定义部分:
typedef struct
{
UINT8 port_sou;//源端口号
UINT8 port_dest; //目的端口号
UINT8 len;//报文总长度
UINT8 sum_che;//校验和
}
UDP_HEADER; //UDP首部数据结构
其次,网络层用到IP协议是在UDP报文基础上加上IP首部。IP首部程序定义如下:
Typedef struct
{
UINT8 ver_len;//版本号+报头长度
UINT8 serv_type;//服务类型
UINT8 len_tot;//总长度
UINT8 iden; //标识字段
UINT8 info_frag;//标志位+段偏移
UINT8 ttl; //生存期TTL:
UINT8 id_proto; //协议
UINT8 cksum_header;//头部校验和
UINT8 ipad_sou;//源IP地址
UINT8 ipad_dest;//目的IP地址
}
IP_HEADER;//IP首部数据结构
接下来,在链路层上传输的是以太网帧,相关程序定义如下:
Typedef struct
{
UINT8 hwad_dest; //目标MAC地址
UINT8 hwad_sou; //源MAC地址
UINT8 type_frame;//上层所携带的数据类型
}
ETH_HEADER;//以太网帧头数据结构
在完成了链路层的以太网帧封装后,还须实现ARP,即地址解析协议。ARP报文程序定义如下:
Typedef struct
{
UINT8 type_hard;//硬件类型
UINT8 type_pro;//协议类型
UINT8 len_hwad;//硬件地址长度
UINT8 len_ipad;//协议地址长度
UINT8 type_mes;//操作码
UINT8 hwad_sou;//发送端MAC地址
UINT8 ipad_sou;//发送端IP地址
UINT8 hwad_dest;//接收端MAC地址
UINT8 ipad_dest;//接收端IP地址
}ARP_HEADER; //ARP报文数据结构
传输层的UDP协议和TCP协议、网络层的IP协议、链路层的以太网帧协议和ARP协议组成了精简的TCP/IP协议栈。
4 试验结果
试验以TMS320F2812为无刷电机控制核心,完成对无位置传感器无刷直流电机的控制。采用额定转速为4 000 r/min,额定电压300 V、额定功率1 kW、极对数2极、200 V的无刷直流电动机。考虑到安全性,本次试验把电机转速限定为3 500 r/min。试验中,无刷直流电机无位置传感器系统实现轻载启动,并在稳定后突加外界扰动,转速波形如图7所示。

图7 试验结果
由图7可见,当启动成功,转速攀升至预定转速后,额外增加一短暂的负载扰动,形成的曲线图是通过基于以太网传输至上位机得到数据而成。从试验可以看出,该系统降低小幅速度后迅速调整到原来的速度,验证了快速、稳定的无位置传感器控制。在整个过程中,电机控制器与上位机之间的通信非常及时、可靠、稳定。
5 结束语
反电动势过零电路为核心硬件的无刷直流电动机无位置控制部分实现了位置信号的精确估计,确保无传感器控制系统的运行可靠。该系统的硬件电路设计的复杂度降低,并显示出良好的扩展性。同时,对无刷直流电机的远程控制通过以太网通信技术的运用也得以完成。由试验结果可以看出,以太网网络可靠、数据通信准确。此外,以太网通信模块体积小、功耗低、抗干扰性好、处理能力强,可在电磁干扰强的复杂环境中工作;整个通信过程稳定、可靠,有效地保证了系统实现电机远程调速控制。
[1] 关宗安,仲丛久,张芝贤,等.基于TMS320F2812 DSP的网络通信系统设计.电子技术应用,2009(3):94-96.
[2] 刘玉明,吴爱国,王硕.基于反电动势法BLDCM转子位置检测方法的改进.仪表技术与传感器,2013(6):115-117;120.
[3] 樊杨鎏,李琨,李静,等.基于嵌入式以太网的异步电机矢量控制系统.机械工程与自动化,2007(1):118-120.
[4] 刘海峰.基于DSP的TCP/IP协议的应用研究.微电子学与计算机,2006(2):179-181.
[5] 苗大龙,李果,张广明,等.基于AT89C51RC的以太网数据采集器设计与实现.机床与液压,2011(2):101-103.
[6] 王治学,王海龙,宋军华.RTL8019AS网卡芯片在以太网通信中的应用.现代仪器,2009(4):15-17.
[7] 马晓伟,马钧华.以太网在电机控制系统中的应用.轻工机械,2006(3):87-89.
[8] 闫晓娟,刘景林.嵌入式无刷直流电机网络控制系统.计算机测量与控制,2010(6):1335-1338.
[9] 王永华.一种网络多媒体集成控制系统的设计:[学位论文].广州:广东工业大学,2006.
Design of System Based on Ethernet Bus for Sensorless Brushless DC Motor
ZHANG Xing,WU Ai-guo,LIU Yu-ming,WANG Shuo
(School of Electrical Engineering and Automation,Tianjin University,Tianjin 300072,China)
A back-EMF zero-crossing detection circuit of sensorless brushless DC motor (BLDCM) based on Ethernet bus was designed and accurate detection of back-EMF zero-crossing signal was achieved.Ethernet bus was used to accomplish the real time communication between the controller and remote computer.The application of speed of Ethernet controller RTL8019AS was extensively introduced,providing with the software and hardware design of Ethernet bus communication modules.In the last,the testing results on assessing reliability,stability,and timeliness of Ethernet bus communication were also presented.
brushless DC motor ; back-EMF method ;zero-crossing detecting; Ethernet bus
2014-06-04 收修改稿日期:2014-11-15
TM381
A
1002-1841(2015)04-0069-04
张兴(1989—),硕士研究生,主要研究领域为传感器及电机系统。E-mail:z541740599@126.com 吴爱国(1954— ),教授,主要研究领域为电力电子及电机控制。E-mail:agwu@tju.edu.cn
