FMCW雷达测距系统的中频信号处理电路设计
2015-06-07戚昊琛高伟清鲍嘉明
戚昊琛,张 鉴,高伟清,鲍嘉明
(1.合肥工业大学电子科学与应用物理学院,安徽合肥 230009;2.北方工业大学信息工程学院,北京 100144)
FMCW雷达测距系统的中频信号处理电路设计
戚昊琛1,张 鉴1,高伟清1,鲍嘉明2
(1.合肥工业大学电子科学与应用物理学院,安徽合肥 230009;2.北方工业大学信息工程学院,北京 100144)
中频信号处理电路是雷达测距系统的核心硬件。在计算得到滤波及放大电路的关键参数后,基于双运放MC33078,设计实现了包含高通和低通2个单元的滤波电路;利用可调增益放大器AD603和静电计级运算放大器OPA128等设计实现了可调增益放大器、峰值检波电路和AD/DA转换电路。对所设计的关键电路进行了模拟验证,并通过对静态目标的测距实验,验证了中频信号处理电路对雷达测距的适用性和测试值相对于计算值的准确性。
FMCW雷达;测距系统;中频信号处理;电路设计
0 引言
基于调频连续波(FMCW)的雷达系统具有全天候性、灵敏度和探测精度的优势,近年来已成为测距系统的优选方案[1]。该测距系统的核心是中频信号处理电路,其作用是对雷达混频器输出的中频信号进行放大、匹配滤波等处理,消除干扰杂波信号,实现幅值统一,为信号的DSP软件处理做好准备[2]。本文以24 GHz FMCW雷达为前端,设计中频信号处理电路。以汽车防撞测距应用为例,系统的作用距离为1~100 m,测速范围为0~220 km/h。
1 原理及参数计算
1.1 滤波电路参数
由FMCW毫米波雷达测距原理分析可知,中频信号的频率可表示为
(1)
式中:ΔF为调制带宽;fd为中频信号频率;fVtune为三角波调制频率;c为光速;R为相对距离;v为相对速度,根据测距测速要求设调制频率为150 Hz(远距离检测)与750 Hz(近距离检测)2种[3];ΔF设为200 MHz;f0设为24 GHz。
由上述公式计算可得,在系统测距测速范围内,中频信号频率范围为0~100 kHz。
低通滤波器用于滤除高频杂波,因此,设其截止频率为100 kHz;而高通滤波器主要用于滤除以调制信号为主的低频杂波,其截止频率应设为调制频率的10倍[3-4],设为1.5 kHz和7.5 kHz。
1.2 放大电路参数
根据信号的幅值特性进行分析计算可得放大电路所需参数。
上下扫频段中频信号幅值可表示为
S=Kcos{2π[(f0+B/2)(t-τ(t))±μ(t-τ(t))2/2]+φ0}
其中,
(2)
式中:B为调制信号带宽;K为信号传输损耗因子;μ为调制信号斜率,为40 MHz/V;φ0为发射信号的初始相位;t为时间变量。
由上述公式计算可得,在系统测距测速范围内,中频信号的幅值范围为50~300 mV,且信号幅值与障碍物的相对距离成反比。远距离时幅值微小,易被大幅值信号淹没,而近距离时幅值大,易造成饱和失真。AGC环路组成的自动增益放大器,可根据输入信号幅值的大小自动调整增益,使得信号幅值统一,符合A/D转换芯片的要求。系统采用的ADC芯片模拟输入电压中心为2.4 V,差分输入,上下摆动在0.55 V内。根据中频信号的幅值范围,将低通滤波的增益设为6 dB,则AGC的增益范围设置为10~30 dB时,即可满足放大要求。
2 滤波电路设计
2.1 高通滤波电路
系统采用双运放MC33078来实现高通滤波器。截止频率设定为1.5 kHz和7.5 kHz,无放大增益,采用有源滤波,设计电路图如图1所示。
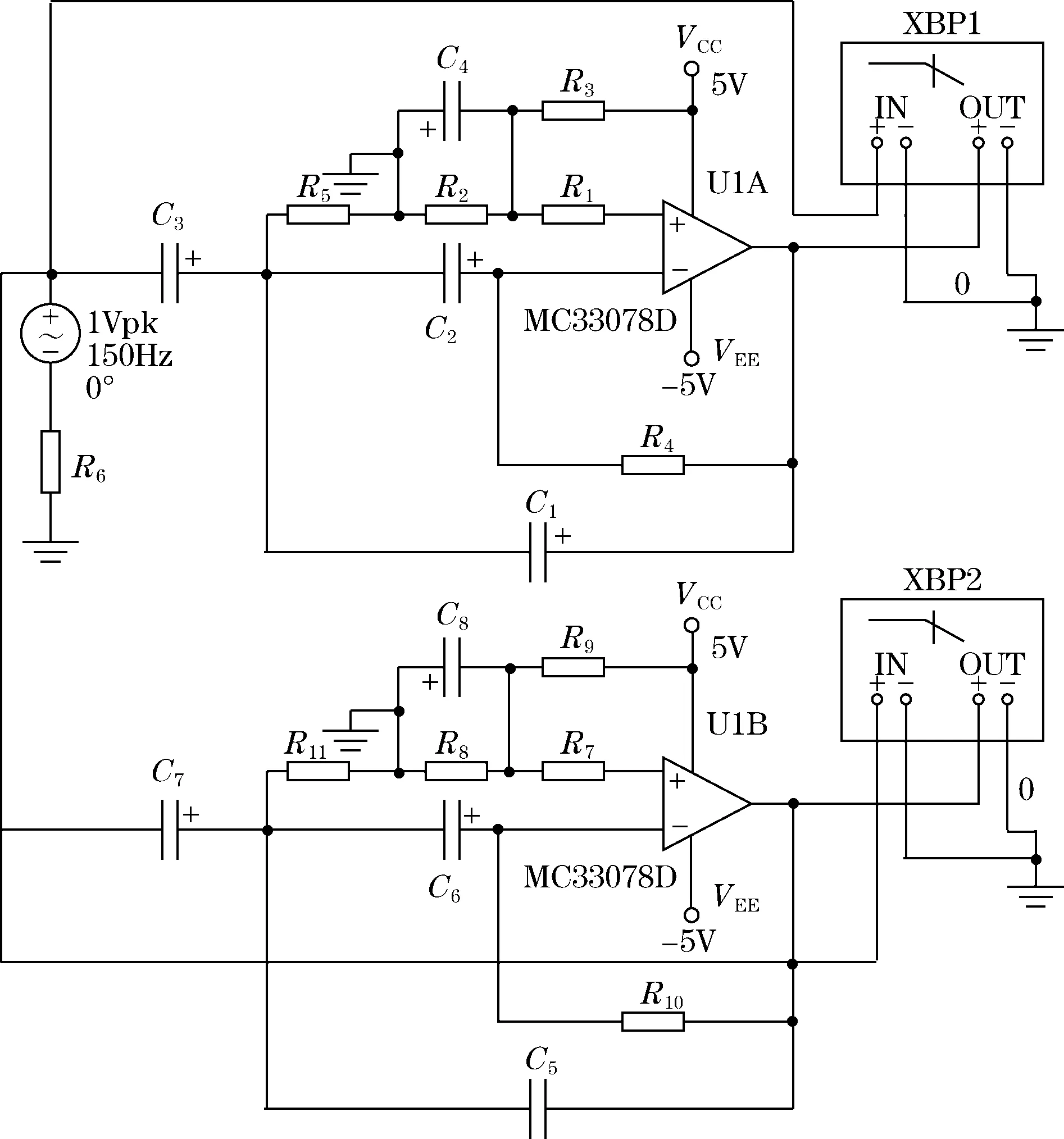
图1 1.5 kHz/7.5 kHz高通滤波电路图
利用Multisim进行相应电路的仿真,其中波特图示仪XBP1连接经过1.5 kHz滤波后的信号,波特图示仪XBP2连接经过7.5 kHz滤波后的信号,高通滤波电路仿真结果如图2所示。
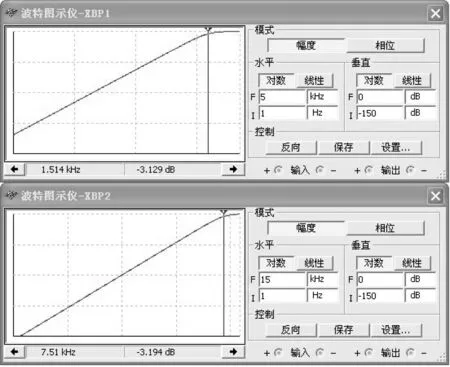
图2 1.5 kHz/7.5 kHz高通滤波电路仿真图
由仿真图得到的幅频特性曲线可见,信号频率在低于1.5 kHz和7.5 kHz时被吸收,只有高于设定频率的信号才被通过,仿真结果表明,该高通滤波电路是符合设计要求的。
2.2 低通滤波电路
按上述要求,低通滤波器截止频率为100 kHz,增益为6 dB,所设计的电路如图3所示。
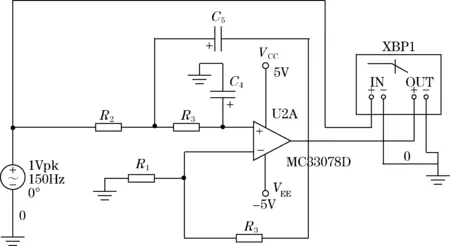
图3 100 kHz低通滤波电路图
图4为利用Multisim进行低通滤波电路仿真所得的仿真图。
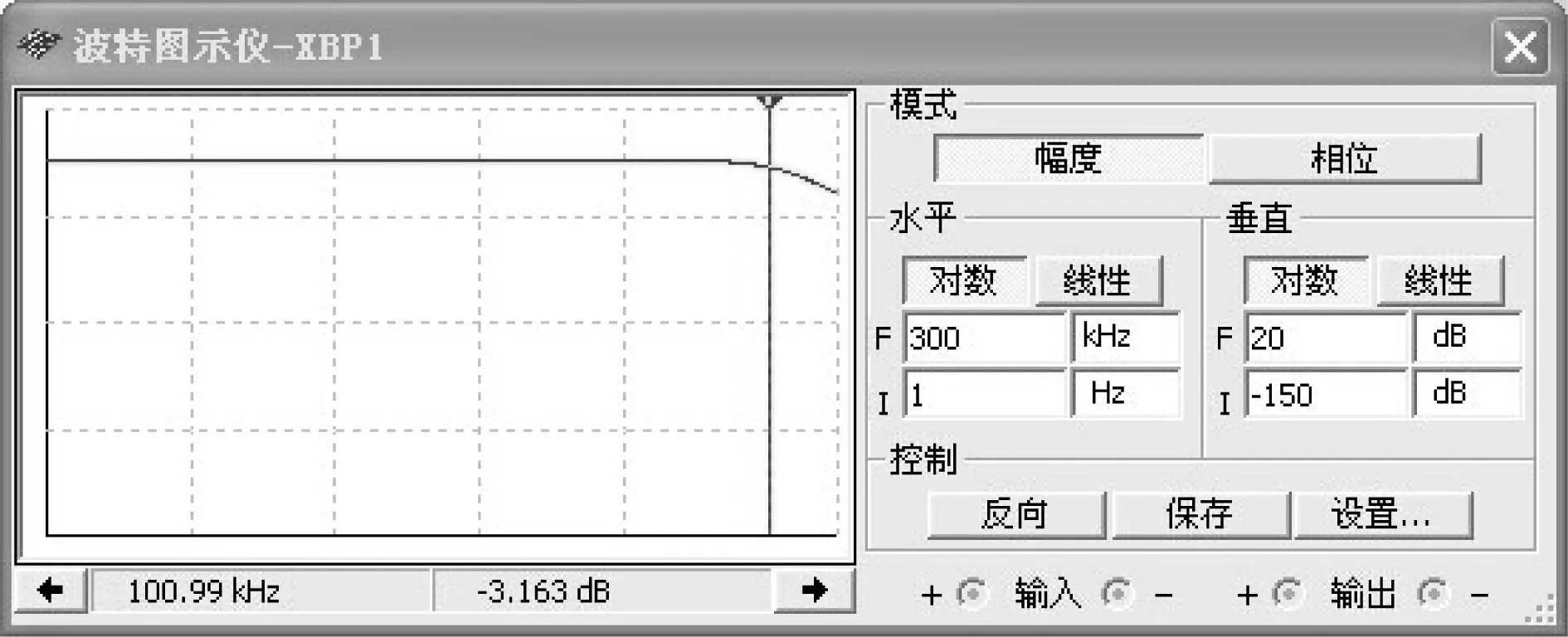
图4 100 kHz低通滤波电路仿真图
由图4得到的幅频特性曲线可见,信号频率在高于100 kHz时被吸收,只有低于设定频率的信号才被通过,仿真结果表明该低通滤波电路符合设计要求。
3 可调增益放大器
AD603通过对引脚5和7不同的连接方式来决定其可控增益范围。芯片的增益为40 VG+20 dB,其中,VG为压控端电压,系统要求增益范围为10~30 dB,则根据芯片手册的电阻曲线,选择在引脚5与引脚7间接电阻R1=2.49 kΩ,使其最大增益约为41 dB[4-5]。设计的可调增益放大电路如图5所示。
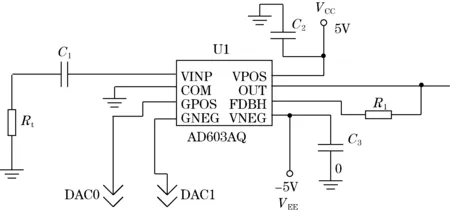
图5 利用AD603设计的可调增益放大电路
AD603脚1和脚2的电压差由DSP控制,DSP控制信号通过DAC转换为模拟信号后调节AD603的输出增益。
4 峰值检波电路
本文利用Difet静电计级运算放大器OPA128来设计的峰值检测电路如图6所示。
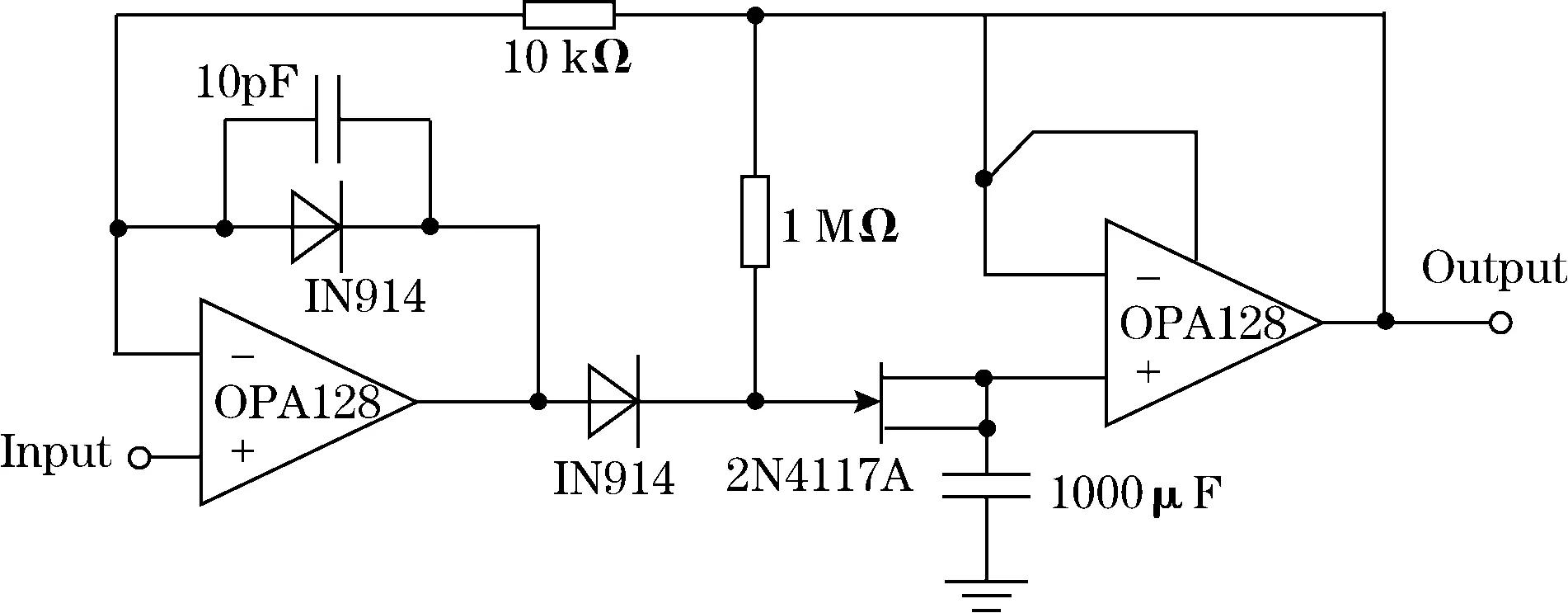
图6 峰值检波电路图
利用Multisim模拟,得到了该峰值检波电路的仿真结果,如图7所示。
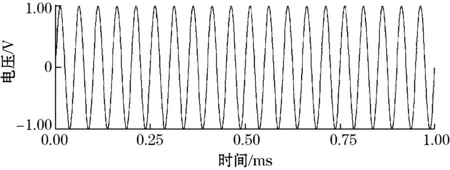
图7 峰值检波电路仿真图
由图7可见,信号通过峰值检波,成功地输出了波形的峰值,表明该电路可良好地检测波形的幅值,符合设计要求。但峰值检波得到的幅值量为模拟量,需通过A/D转换再进行计算。
5 A/D和D/A转换电路
本模块的A/D转换电路选用ADI的AD6644,它是一款性能优良的14-bit、65MSPS单片模数转换器,内含保持电路和基
准源,采用三级子区式转换结构[6]。
在以AD6644为中心的A/D转换电路中,要注意以下几点:首先,其要求高质量低相位噪声的差分采样时钟信号来进行采样编码,本文使用低抖动ECL/PECL时钟,通过低偏压差分器件MC100LVEL16将其差分信号通过电容器交流耦合来编码信号;其次,其模拟输入为差分输入形式,本文利用差分功率放大器AD8138来设计由单端输入到差分输出的电路,作为AD6644的差分模拟输入端,并选用直流耦合来有效滤除偶次谐波分量、共模干扰信号等;再次,本测距系统涉及的多个供电电源为12 V,由于将模拟和数字电源分开并单独设计以避免模数之间的干扰的必然性,将AD6644中所有电源管脚都就近对地接10 nF去耦电容,以滤除电源与地之间的宽频杂波,在靠近电源处接入10~100 nF陶瓷电容,以滤除高频噪声,同时接入10 μF钽电容,滤除低频噪声,另外,模拟地与数字地之间通过磁珠连接,进一步抑制干扰噪声。
图8为按照上述原则与步骤设计的AD6644外围电路图。
D/A转换电路主要用于转换DSP输出的增益控制信号等。本文选用8位双缓冲D/A转换芯片DAC0832,其性价比高、接口简单、转换控制容易。
因DAC0832的转换结果以一组差动电流输出,而AD603
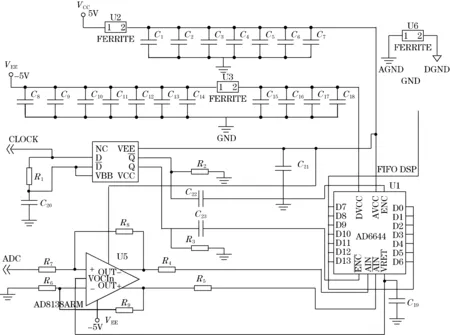
图8 利用AD6644设计的A/D转换电路
等需要电压控制信号,因此必须外接转换电路。图9所示为利用DAC0832设计的一种用两级运算放大器组成的模拟电压输出电路,设参考电压VREF为+5 V,从一级运放输出的为单极性模拟电压,电压值为0~-5 V;从二级运放输出的为双极性模拟电压,即在VOUT得到的输出电压为±5 V。
图中
(3)
计算可得,当DSP控制DAC0832的D0~D7为0~255时,其输出电压VOUT在-5~+5 V之间变化,符合控制要求。
6 实验结果
雷达传感器的调制信号采用三角波形式,带宽为200 MHz,调制频率为150 Hz。限于实验条件及后续DSP信号处理模块的完善程度,通过对静止目标检测,来验证该中频信号处理电路的准确性与实用性。经该电路处理后,检测了不同距离的静止目标,利用数字信号处理后得到的频谱图形如图10所示,其中横坐标为频率,纵坐标为信号幅值。
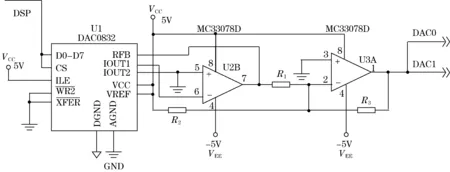
图9 DAC0832双极性输出D/A转换电路
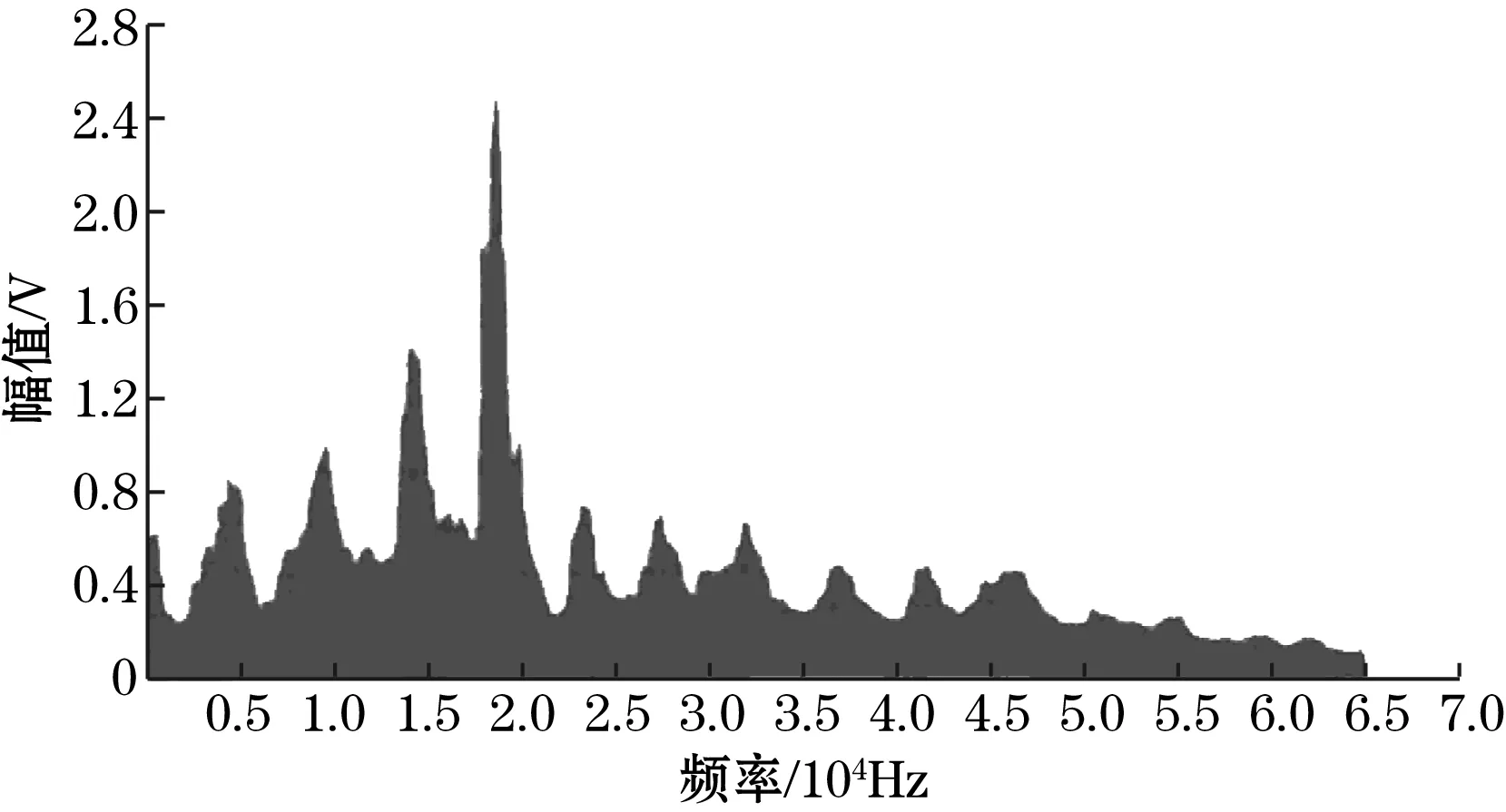
(a)距22 m的静止目标输出信号频谱图
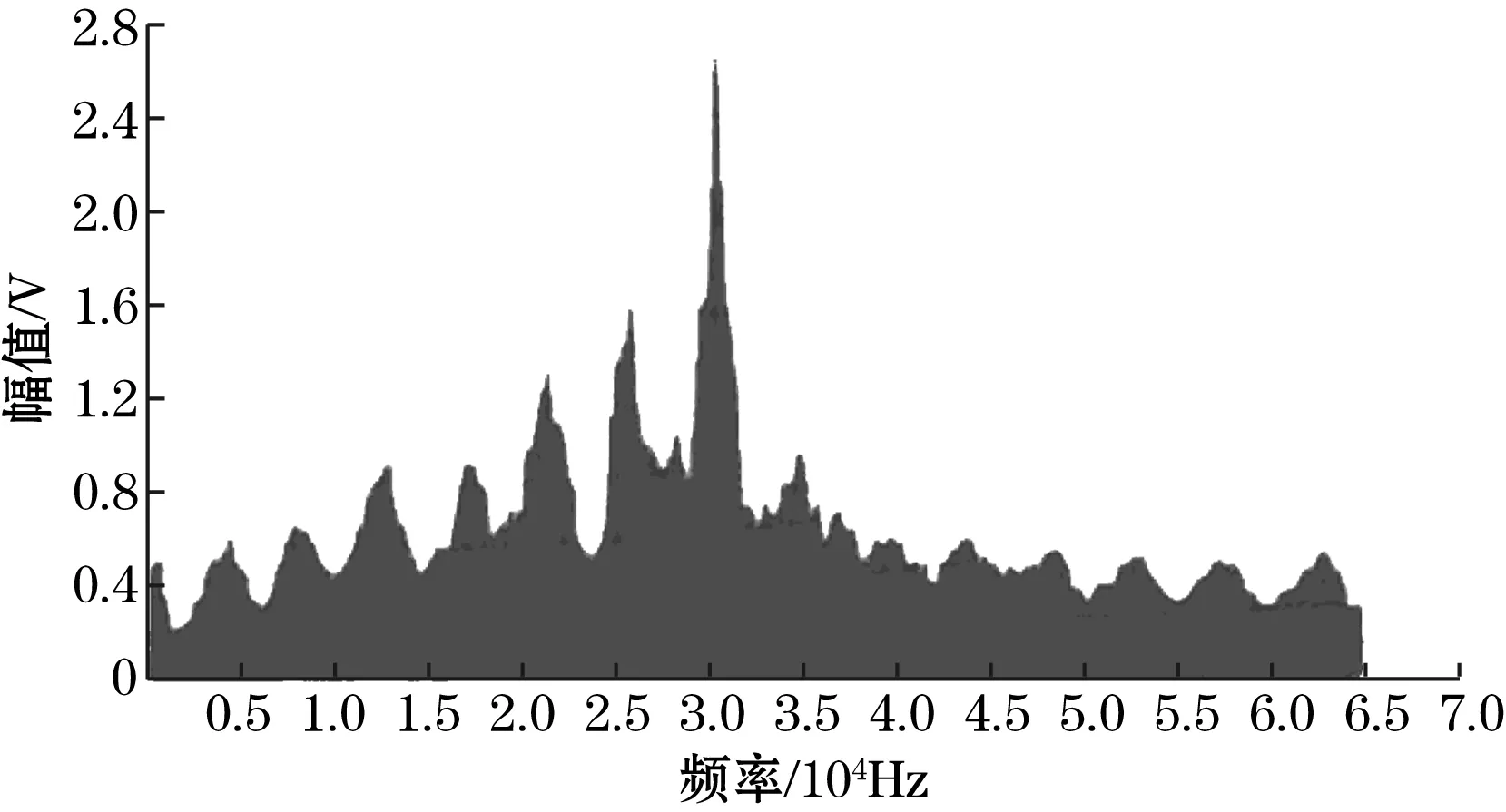
(b)距40 m的静止目标输出信号频谱图图10 经中频调理电路处理的信号频谱图
如图所示,距离22 m的静止目标在频谱图上得到的频率值为17.93 kHz,而根据式(1)得到的理论值为17.6 kHz;距离40 m时的静止目标在频谱图上得到的频率值为31.86 kHz,理论值为32 kHz,在误差范围之内,符合设计要求。
7 结论
中频信号处理电路是FMCW雷达测距系统的关键与核心。
本文基于对雷达传感器工作原理的分析,得到中频信号处理电路的关键参数。设计并实现了包括滤波、放大、峰值检波和AD/DA转换的完整的中频信号处理电路。通过对关键电路的仿真和整体系统的实验测试,验证了该电路对于雷达防撞测距系统的适用性。该电路的设计与实现,可为24 GHz FMCW雷达的测距应用提供核心的硬件解决方案。
[1] TAKANO T,NAKANISHI Y,TAKAMURA T.High resolution FMCW Doppler radar FALCON-I for W-band meteorological observations.Antenna Technology and Applied lectromagnetics(ANTEM),2012 15th International Symposium on.IEEE,Poulouse 2012.
[2] 戚昊琛,解光军,张鉴.FMCW 雷达系统及其前端数据采集模块设计.电子科技,2012,25(5):44-46.
[3] 汪红,张杰,张大彪.调频连续波(FMCW)雷达信号调理电路.仪表技术与传感器,2012(1):105-107.
[4] 戚昊琛,胡智文,张鉴.FMCW雷达系统的双模方向判断模块研究.电子测量与仪器学报,2014,28(5):486_492.
[5] 钟鹏,郝国法.MAX11043 在 FMCW 雷达测距系统中的应用.仪表技术与传感器,2014(3):68-70.
[6] 邱兆坤,王伟,马云.一种高分辨ADC 有效位数测试方法.国防科技大学学报,2006,26(1):1-5.
Design of IF Signal Processing Circuit for FMCW Radar Ranging System
QI Hao-chen1,ZHANG Jian1,GAO Wei-qing1,BAO Jia-ming2
(1.School of Electronics Science and Applied Physics,Hefei University of Technology,Hefei 230009,China;2.School of Information Engineering,North China University of Technology,Beijing 100144,China)
Intermediate frequency (IF) signal processing module is the core of radar range system.After the key parameters of filter and amplification were calculated,the filter circuit including high-pass filter and low-pass filter was designed and realized based on double op-amp MC33078.Then based on adjustable gain amplifier AD603 and operational amplifier OPA128,the adjustable gain amplifier,peak detection circuit,and AD/DA switching circuit were designed and realized.The simulation and validation of key circuits were performed.Further more,the applicability and veracity of whole circuit module was confirmed by static target ranging experiment.
FMCW radar;ranging system;IF signal process;circuit design
国家自然科学基金资助项目(11374084,61307056);合肥工业大学科学研究发展基金资助项目(J2014HGXJ0091,J2014HGXJ0082)
2014-10-20 收修改稿日期:2015-03-01
TN952
A
1002-1841(2015)08-0029-04
戚昊琛(1981—)工程师,硕士,主要研究方向为传感器设计与应用。E-mail:ammyqi@hfut.edu.cn
张鉴(1977—)副教授,博士,主要从事MEMS与传感系统设计研究。E-mail:zhangjian@hfut.edu.cn
