基于重力加速度传感器的三维高斯计的设计
2015-06-07王学水池金波马建玲
王学水,池金波,马建玲
(1.山东科技大学电子通信与物理学院,山东青岛 266590;2.泰山学院物理与电子工程学院,山东泰安 271000)
基于重力加速度传感器的三维高斯计的设计
王学水1,池金波1,马建玲2
(1.山东科技大学电子通信与物理学院,山东青岛 266590;2.泰山学院物理与电子工程学院,山东泰安 271000)
文中采用3个线性霍尔元件THS119、加速度传感器芯片ADXL345和单片机测量系统实现了空间静态三维磁感应强度的测量。4个芯片紧凑地贴在探头相互正交的4个平面上,依据重力加速度坐标对磁感应强度坐标进行修正。数据采集电路为探头提供工作电流,完成数据采集并实现与计算机的通信。计算机显示程序使用LabVIEW图形化编程语言编写,用于显示磁感应强度的大小、三维分量、方向角和三维空间取向图。
三维高斯计;THS119;坐标修正;ADXL345;LabVIEW
0 引言
磁计量是电磁学计量中重要的组成部分[1],目前各种磁场测量仪为磁场理论研究和磁场应用提供观察和可靠的参数,是一类非常重要的科学仪器。各种磁场测量仪中,高斯计以其体积小、质量轻、方便携带、消耗小、电池使用寿命长等特点得到广泛应用。但传统高斯计只能测量并显示测量点的磁感应强度大小,不能测量其空间取向,磁感应强度作为矢量的全部信息不能被完整反映出来。
针对传统高斯计不能显示磁场方向的局限性,本设计在继续使用霍尔效应原理的基础上,通过对测量探头和数据采集电路重新设计,使磁感应强度三维测量值可以变换到空间固定坐标系中,通过计算机以三维散点图形式显示出磁感应强度的空间取向和方向角,同时显示其大小和在固定坐标系中的三维方向分量,提高了磁场测量的数字化和智能化水平。
1 基本构成
三维高斯计的硬件分为3部分:测量探头、数据采集电路和用于显示的计算机,如图1所示。测量探头上贴有3个相互正交的线性霍尔元件和1个重力加速度测量芯片,通过引线与数据采集电路相连。数据采集电路由电源电路、恒流源电路、模拟开关、仪用放大器、单片机和串口转USB接口电路组成。电源通过变压、整流、滤波和稳压从220 V交流电源得到模拟开关和仪用放大器需要的±5 V模拟电压,单片机需要的+5 V、探头上ADXL345芯片需要的+3.3 V和恒流源需要的+8 V数字电压;恒流源为线性霍尔元件提供恒定的工作电流;主控芯片选用带10位A/D(Analog To Digital,A/D)转换器的STC12C5A16S2单片机。单片机控制模拟开关先后选通x、y、z方向的霍尔元件输出的霍尔电压,经仪用放大器放大50倍左右后接单片机A/D转换器,由单片机完成A/D转换,接着单片机读取ADXL345芯片数据,最后通过串口转USB接口把三个方向霍尔电压数据和探头转动角度数据传给计算机[2]。
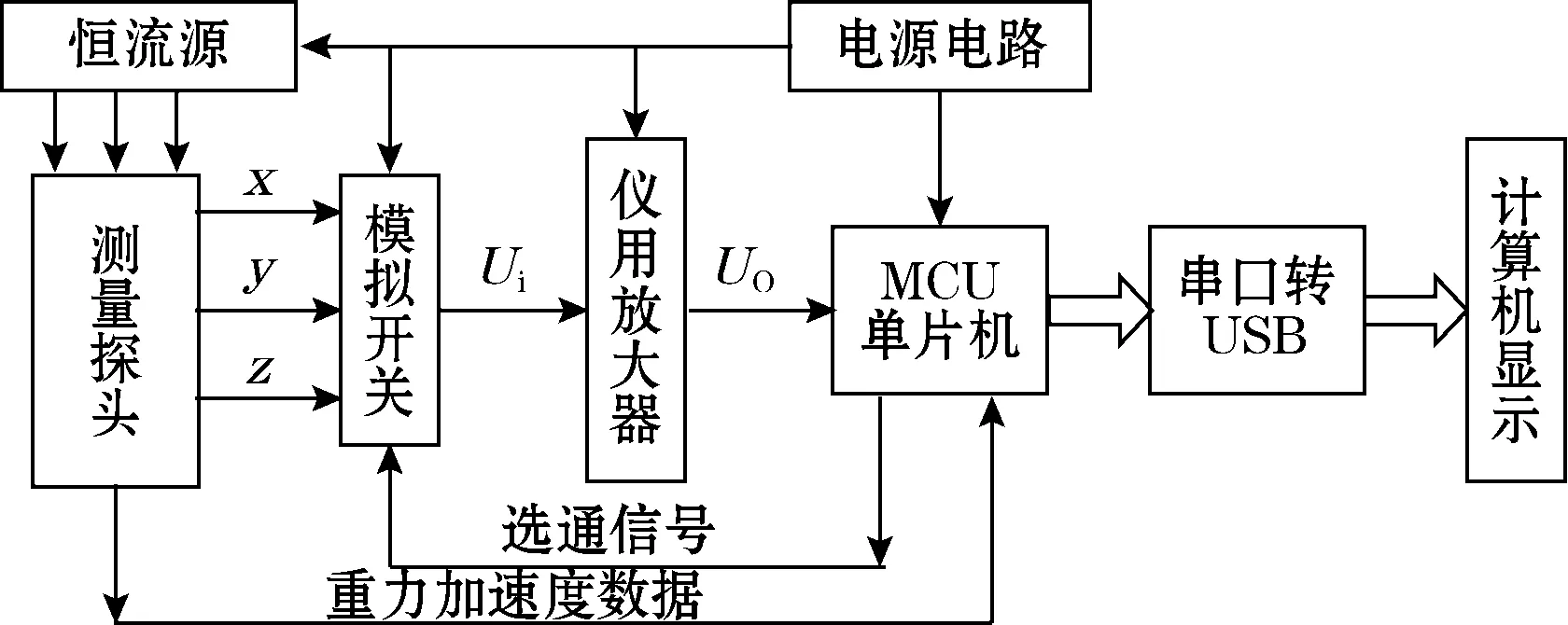
图1 三维高斯计系统框图
2 数据测量和数据处理
2.1 磁感应强度测量
霍尔元件THS119 的输出电压与被测磁场强度之间具有良好的线性度,只需要进行线性校准,所以选它作为磁场测量用芯片。霍尔元件输出电压是mV量级的微弱信号,需要对其进行放大后才能进行A/D 采样。 这里用3个DPOP07运算放大器加适当的电路构成了仪用放大器[3],如图2(a)所示,其输入电压与输出电压满足(1)式。
(1)
霍尔传感器的工作电流由稳压芯片LM317和调节电阻得到[4]。霍尔传感器信号采集电路如图2(b)所示,3个霍尔元件共用了一个仪用放大器,同时,STC12C5A16S2单片机只能对0~+5 V电压进行有效的A/D转换,如果对负电压进行A/D转换,结果是0。所以,在霍尔元件和放大器之间接入2个双四选一模拟开关CD4052,2个芯片输入端同名管脚输入相同,输出端X、Y反接后接入放大器输入端,2个芯片都有一组闲置输入端口,通道选择端口A、B接单片机管脚,由程序完成选通控制,实现了仪用放大器的分时复用。数据采集过程为一个模拟开关闲置,另一个模拟开关3个有效输入依次选通并完成A/D转换,得到x,y和z方向霍尔电压,原先选通的闲置,原先闲置的3个输入管脚依次选通并完成A/D转换,一次数据采集结束,这样每个方向有2组数据,不为0的为有效数据,电压正负号由专门标志位标记。
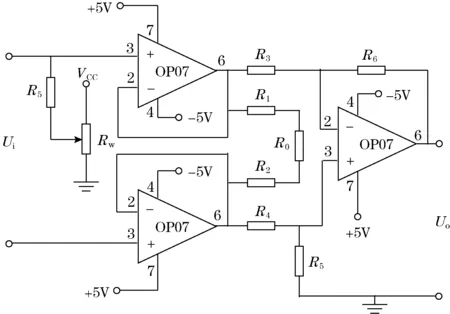
(a) 仪用放大器电路
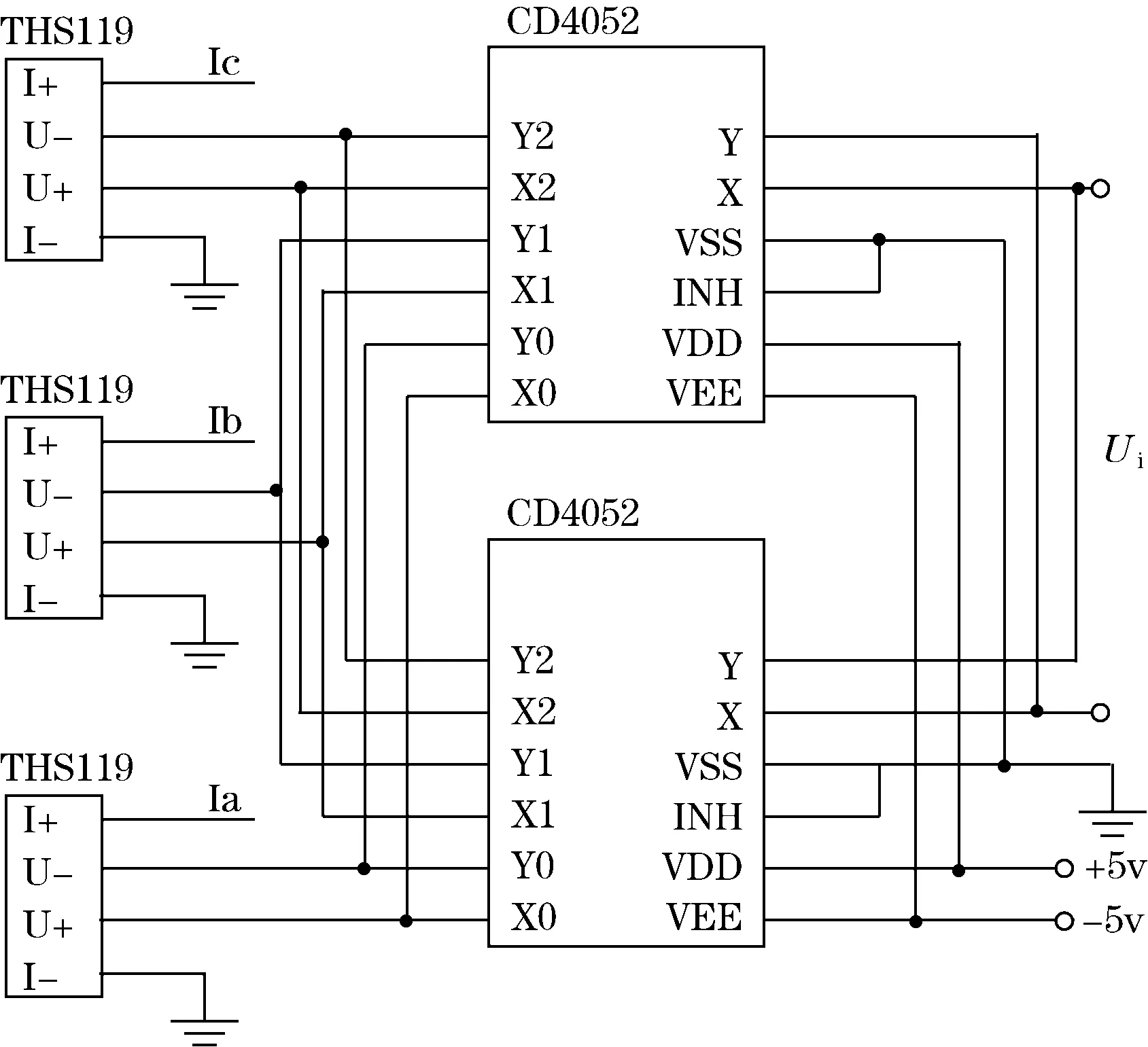
(b) 传感器连接电路图2 霍尔传感器信号采集电路
2.2 探头角度测量
ADXL345是一款完整的3轴加速度测量系统,可选择的测量范围有±2g,±4g,±8g或±16g。既能测量运动或冲击导致的动态加速度,也能测量静止加速度,例如重力加速度,使得该器件可作为倾斜传感器使用。使用I2C(Inter-Integrated Circuit,I2C)总线作为与单片机通信的总线时电路连接图如图3所示,P0.3和P0.2是单片机管脚。
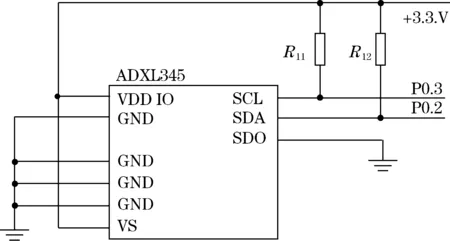
图3 ADXL345连接电路
2.3 测量探头设计
选用3个灵敏度相近的霍尔元件传感器,分别放置在3个维度上,互成90°排列,令这3个霍尔元件的主平面法线分别为x′,y′,z′轴,如图4所示,由于霍尔元件的体积很小,探头可以做成点式探头的形式。测量探头可以自由旋转,即使磁感应强度相同的同一测量点也会随探头状态的不同得到不同的三维分量,所以测量值不能直接用于显示,需要进行坐标修正。修正的依据是重力方向始终竖直向下,因为重力场与水准面正交,现将xOy平面与水准面重合,重力场的反方向为z轴,高斯计探头的指向在xOy平面的投影方向为x轴,再根据右手定则确定出y轴,将Oxyz坐标系作为固定坐标系用于计算机显示。
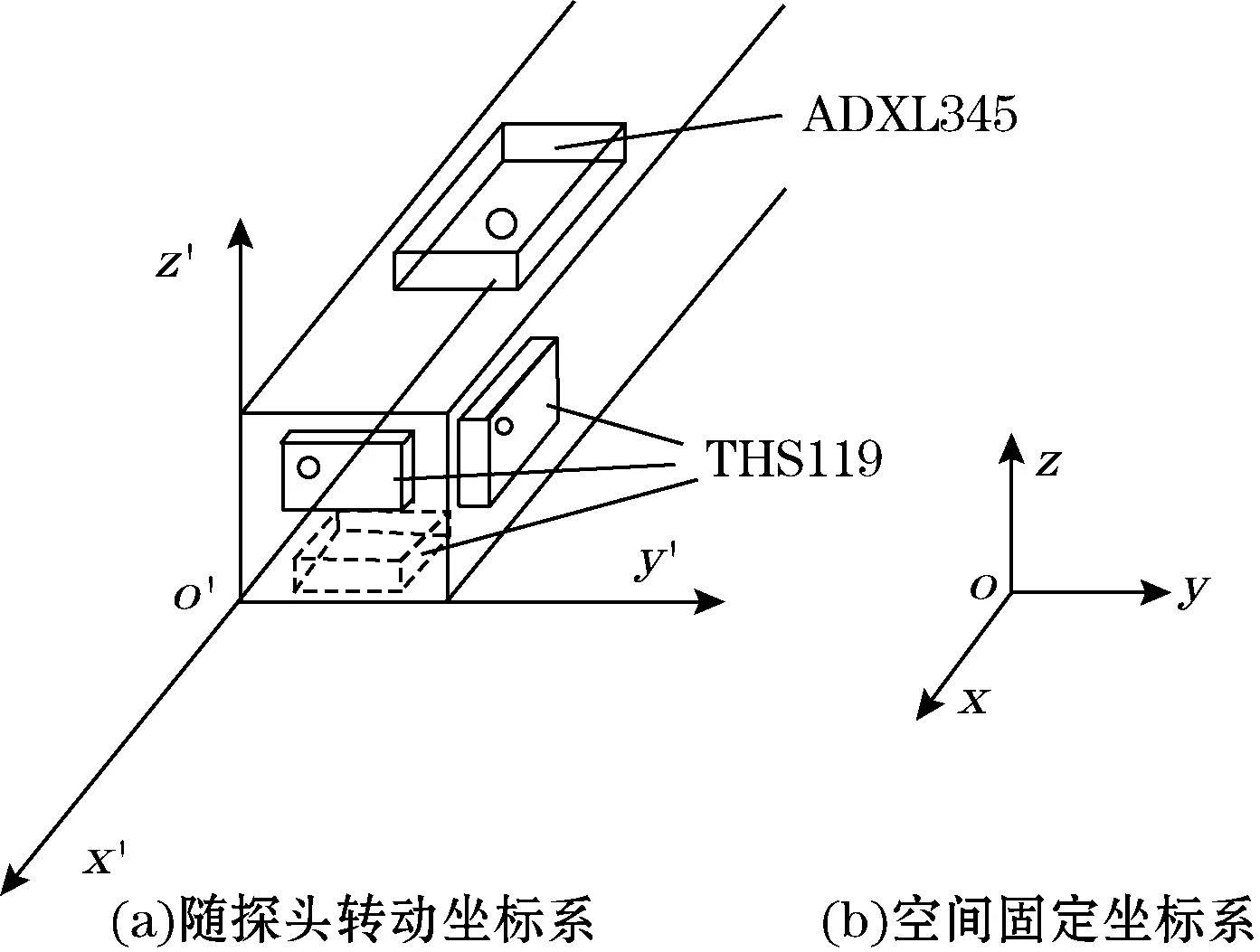
图4 探头结构与芯片位置
刚体绕定点的任何一个有限转动可通过转动前后的坐标系之间的方向余弦矩阵表示,而合转动的方向余弦矩阵是分转动的方向余弦矩阵的顺次乘积,所以描述刚体方位的方向余弦矩可通过下式用古典欧拉角表示[5].
A=AφAθAψ


式中:φ为自转角;θ为章动角;ψ为进动角。
此欧拉角可以通过重力加速度三维分量计算得到。如图4所示,当O′x′y′z′与Oxyz重合时,ADLX345芯片测得重力加速度坐标为(0,0,z),当O′x′y′z′相对于Oxyz发生欧拉角为(ψ,φ,θ)的旋转后,如图5所示,ADLX345芯片测得重力加速度坐标为(x′y′z′)。重力加速度矢量在空间是定值,即z值已知,(x′y′z′)是测量值,两者和对应的欧拉角之间满足:
(3)
于是得到:
(4)
(5)
通过式(4)式计算得到的φ的取值区间是(-π/2,π/2),自转角φ的实际取值区间是[0,2π),所以需要对通过公式计算的φ再根据坐标作调整,据图5分析可得φ关于x′和y′的分段函数(6)。自转角θ的取值区间与(5)式值域相同,都是[0,π],无需调整。
(6)
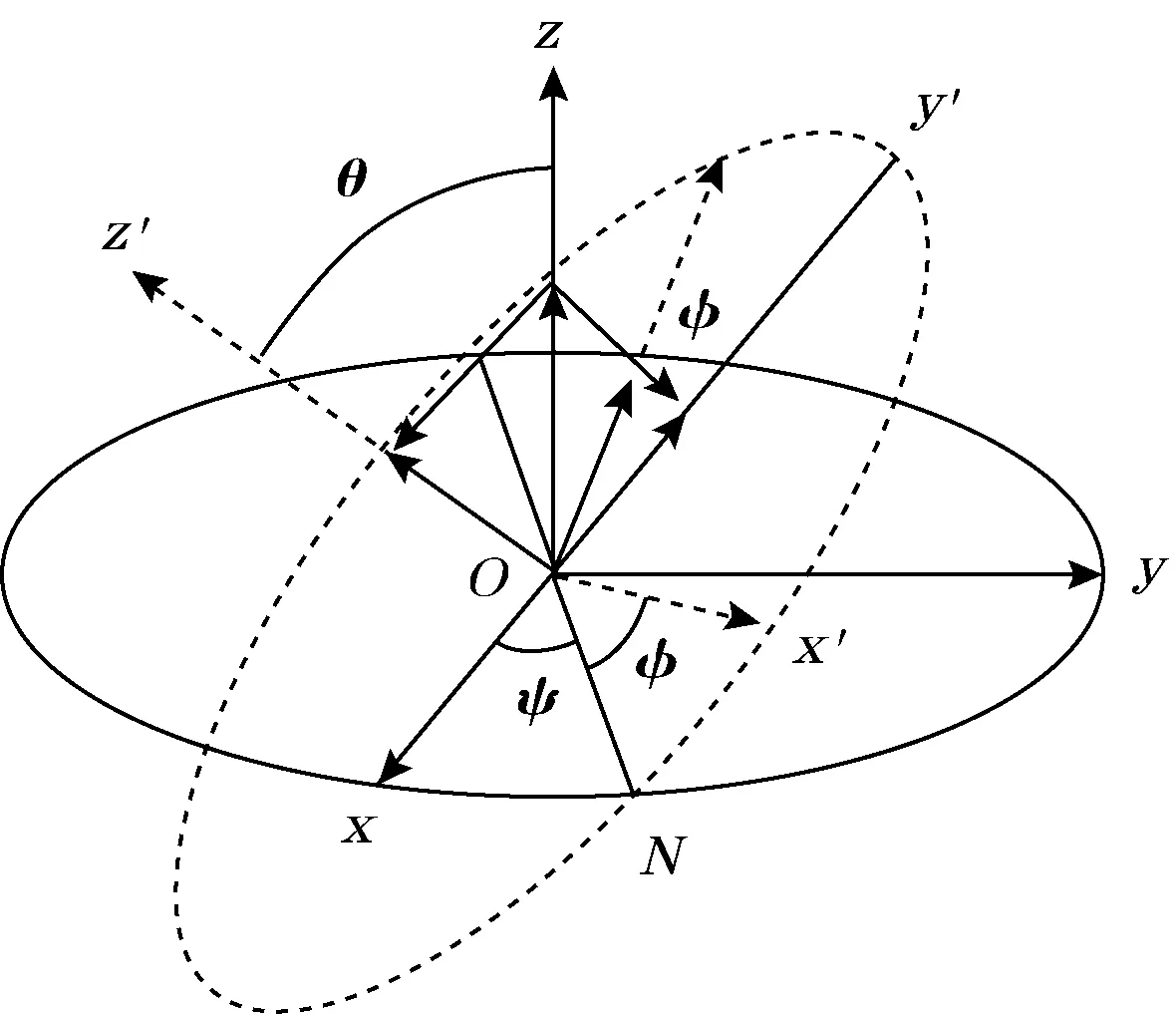
图5 重力加速度分量与对应的欧拉角
据此,可以求出欧拉角中的自转角φ和章动角θ,进动角ψ虽然无法确定,但已经规定了x轴方向为探头在水准面的投影方向,最后把O′x′y′z′坐标系中三维磁场矢量坐标(Bx′,By′,Bz′)旋转(0,-φ,-θ)便得到其在空间固定坐标系中对应的坐标(Bx,By,Bz)。Oxyz并非绝对固定,它随探头指向的变化在空间绕z轴旋转。
3 计算机显示
使用LabVIEW编写本设计中的计算机显示程序可以大大缩短开发周期,保证了系统的稳定性和可靠性,它具有数据采集、 数据分析、 信号生成、 信号处理、输入输出控制等功能[6]。本设计中用到的大部分数学函数都可以使用LabVIEW自带的VI,反三角函数、串口通信、条件选择结构和循环结构等都很容易实现。磁场方向采用三维散点图的形式显示,在修正后的坐标到原点之间均匀地取1 000个点,同时显示,具有矢量效果。系统的调零在计算机软件中实现,系统上电后探头置于无磁场环境中,系统会显示一个霍尔电压输出值,在软件的补偿值Ⅵ中输入该值就完成了系统调零。
最终的显示效果如图6所示,三维坐标系对应空间固定坐标系,三维图形中的中间柱形表示磁场的空间取向,周围三个面上分别表示其在该面上的投影,空间取向柱形的原点表示N极,指向S极,另外还显示了磁感应强度的大小和在图示坐标系中的坐标大小及其方向角。
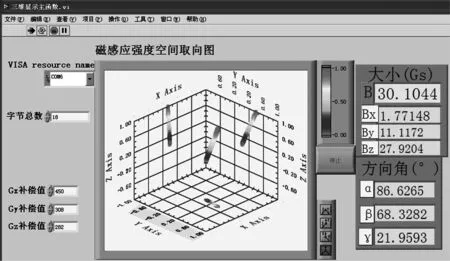
图6 三维磁感应强度LabVIEW显示效果图
4 结论
本设计以磁感应强度矢量测量和显示为目的,首次将ADXL345加速度测量芯片用于物理量矢量的空间取向测量中,结合传感器技术、计算机技术和嵌入式技术,完成了原理分析和实物制作。其意义在于克服了传统高斯计无法同步测量磁场方向的局限性,为矢量方向的测量和显示提供了新思路、新方法。实际使用中效果良好,性能稳定。测量系统可以进一步优化设计,例如用液晶屏显示取代计算机显示,以实现测量系统的轻型化和智能化,当然这就对主控芯片的运算能力和程序设计提出了更高要求;为了提高测量精度,需要将探头做得更加精细,这对制作工艺有更高要求;还可以选用位数更高的A/D转换芯片来进一步提高测量精度。
[1] 王勇,廉晨龙,赵昌苗,等.一种新型数字高斯计的设计.仪表技术与传感器,2003(10):14-16.
[2] 雪原.智能三维磁场测量仪的研究:[学位论文].南京:南京理工大学,2011.
[3] 杨素行.模拟电子技术基础简明教程.北京:高等教育出版社,2006.
[4] 刘晓宇.多功能综合测试仪4通道数据采集模块设计:[学位论文].成都:电子科技大学,2011.
[5] 贾书惠.广义欧拉角及其应用.力学与实践,1991,13(4):54-58.
[6] 张丙才,刘琳,高广峰,等.基于LabVIEW的数据采集与信号处理.仪表技术与传感器,2007(12):74-75.
Design of Three Dimensional Gauss Meter Based on Gravity Acceleration Sensor
WANG Xue-shui1,CHI Jin-bo1,MA Jian-ling2
(1.College of Electronic Communication and Physics,Shandong University of Science and Technology,Qingdao 266590,China;2.College of Physics and Electronic Engineering,Taishan University,Taian 271000,China)
The measurement of spatial static three dimensional magnetic induction intensity using three linear hall-effect elements THS119,the accelerator sensor chip ADXL345 and the single chip microcomputer measuring system was realized.Four chips stuck tightly on probe of the four orthogonal plane,and coordinates of magnetic induction intensity were corrected according to the coordinates of acceleration of gravity.The data acquisition circuit provided the probe operating current,and completed the data collection and realized the communication with computers.The computer display program which was used to display the magnitude,the three dimensional component,the direction angle and the three-dimensional orientation figure of the magnetic induction intensity was programmed by LabVIEW which was a graphical programming language.
three dimensional Gauss meter;THS119;coordinate correct;ADXL345;LabVIEW
2014-10-21 收修改稿日期:2015-03-21
TH73
A
1002-1841(2015)08-0023-03
王学水(1964—),教授,硕士,主要研究领域为科教仪器、智能仪器仪表的研发。 池金波(1989—),硕士研究生,主要研究领域为信号检测与处理。E-mail:837215041@qq.com
