大范围快速AFM的高速高精度控制系统
2015-06-06邓卫梅陈代谢殷伯华
邓卫梅,薛 虹,陈代谢,殷伯华,韩 立
(1.中国科学院电工研究所,北京 100190;2.中国科学院大学,北京 100049)
大范围快速AFM的高速高精度控制系统
邓卫梅1,2,薛 虹1,陈代谢1,殷伯华1,韩 立1
(1.中国科学院电工研究所,北京 100190;2.中国科学院大学,北京 100049)
针对原子力显微镜难以同时实现快速、高精度、大范围扫描成像的不足,逐渐出现了带两级扫描器的原子力显微镜。基于自行研制的大范围快速原子力显微镜(含两级扫描器),为其设计了一种以DSP_FPGA为核心的高速高精度控制系统。包括DSP和FPGA间数据传输模式和相互配置等关键技术的设计,然后嵌入PI控制器,最后用实验验证了控制系统的有效性。
原子力显微镜;DSP;FPGA;FIFO;PID;噪声
0 引言
作为被广泛应用于表面分析领域的重要仪器,原子力显微镜(Atomic Force Microscopy,AFM)通过控制针尖与样品表面分子之间的作用力或距离恒定来获得样品的表面形貌。普通的原子力显微镜在扫描过程中仅使用单级扫描器来实现探针的X、Y、Z方向定位,可实现较高速度的扫描速度。例如,Fantner实现了2μm2范围内13s/幅的快速扫描成像[1]。Ando用快速AFM实现了对ATP的动态扫描[2]。然而,虽然原子力显微镜的扫描速度很快,但是扫描范围却限制在很小的范围内,抑制了AFM的进一步应用。为此,研究人员在普通AFM上进行改进形成了双扫描器[3-5],以期实现大范围快速的扫描成像。然而,受原子力显微镜控制系统带宽等的限制,实验结果显示这些扫描器并不能实现无损式的扫描成像。因此,为大范围原子力显微镜设计一个高速高精度的控制系统则显得尤为重要。
对普通原子力显微镜进行改进,形成的包含两级扫描器的大范围快速原子力显微镜如图1所示[6]。下扫描台带动样品进行X、Y、Z方向大范围慢速运动;上扫描器实现Z向小范围内的高速定位;上、下扫描器协同动作就可实现较大范围内的扫描成像。
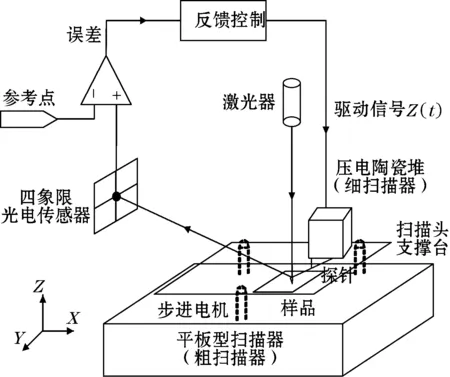
图1 大扫描范围、快速AFM系统结构图
1 大范围快速AFM控制系统设计
鉴于DSP的高速数据处理能力和FPGA的并行处理能力,控制系统选用基于DSP_FPGA的数字处理平台。其中,DSP处理器使用TMS320C6455BZTZ,主频1 GHz;FPGA选用XC5VSX50T,FFG1136封装;DSP与FPGA之间使用64位160MHz的总线连接,可实现高达10 Gbit的带宽。如图2所示,整个控制系统包括上位机人机交互界面、大范围快速原子力显微镜、DSP_FPGA模块和DAC/ADC(数模转换器/模数转换器)。其中,大范围快速原子力显微镜是控制对象,上位机VC界面主要负责扫描参数、指令的发送和扫描图像的显示。两片工作频率为105 MHz的ADC(AD6645)实现下扫描器X、Z向信号的模数转换。一片工作频率为160 MHz的DAC(AD9777)则实现两路16位的模拟输出,其中一路作为上扫描器的Z向闭环控制,另一路负责下扫描器的X向驱动。DSP用于配置FPGA及大数据量扫描信号的实时处理;FPGA则负责AFM的Z向数据采集、逻辑控制。以DSP_FPGA为核心的控制系统除了具有较高的处理速度和控制精度外,其它先进的控制策略及不同的控制算法也可方便的在其上实现。

图2 基于DSP_FPGA的AFM控制系统整体框架
2 控制系统设计关键点
为了得到高精度实时的样品表面成像,DSP和FPGA之间需要足够的带宽来传输大量反应样品表面形貌的数据。因而,为DSP、FPGA设计有效的数据传输模式和便捷的相互配置方式很有必要,包括DSP_FPGA间的数据通讯模式、相互配置方面,以及控制算饭的设计。以下针对各设计具体讨论。
2.1 数据传输模式
AFM扫描中,大量的数据被获取和存储。例如,在AFM扫描图像过程中,假设一行采集1 024个点,每点的数据是16位,则需要的地址范围就是16 384 (1024×16)位。使用RAM需要较宽的地址线,而开发板上DSP和FPGA之间的连接地址有限,因而受硬件条件的制约,此处选择FIFO的通讯方式来代替RAM的通讯方式。FIFO在设计中有以下特点:
(1)多个FIFO实现数据缓存。例如,FPGA采集数据之后先缓存在FIFO0中,然后再传输到DSP;同时,FPGA接收DSP指令存储在FIFO1中,之后再取值译码。
(2)考虑到数字信号存在竞争冒险的问题,在不同时钟域之间选择异步FIFO的读写方式。以存储数据上传到DSP的FIFO为例,写时钟是FPGA端控制,而读取时钟则来自DSP.这种设计不仅避开了信号竞争冒险的问题,还简化了系统的设计。
(3)DSP和FPGA间通过64位工作在160 MHz的EMIFA(外部存储器接口)通讯。EMIFA的宽度是EA[0:6],根据EMIFA的相关文档,当采用64位数据总线时,内部地址和外部地址有3bit的偏移,也就是EA[0:6]实际上是Addr[3:9]。为方便数据上传,整个EMIFA的CE4区域分配给图像数据的上传FIFO,即选定CE4区域,就选中图像数据FIFO.
2.2 DSP、FPGA的相互配置
在AFM扫描过程中,DSP接收到上位机VC的指令后,首先根据指令命令配置FPGA,FPGA则响应此指令并做相应操作,以上位机发送PI控制器的P、I参数为例,DSP根据上位机VC指令配置FPGA、FPGA解码的代码分别如下:
DSP中的代码:
switch (cmd_from_pc.cmd)
{
case SET_PID_PARA:
cmd_head = 0xAAA5LL << 48;
cmd_para1=cmd_from_pc.para1;//P参数
cmd_para2 = cmd_from_pc.para2;// I参数
cmd_para3=cmd_from_pc.para3;//扫描行频
*pSyncData = cmd_head | (cmd_para1 << 32)| (cmd_para2 << 16)|cmd_para3;
break;
}
FPGA解码:
if ((config_data[63:48]== 16'hAAA5))
begin
Kp <= config_data[39:32];//P参数
Ki <= config_data[31:16];// I参数
LineRateData <= config_data[15:0];//扫描行频
config_state <= config_idle;
end
2.3 控制算法
以DSP_FPGA为核心的控制系统中可以方便的实现不同的控制策略及多种控制器,如PID控制器、前馈控制器、基于模型的控制器等等。此处仅以被广泛应用的PI控制器为例来证明此控制系统的有效性。PI控制器响应下扫描器的Z向误差信号并对其进行数据处理,从而驱动上扫描器实现跟踪响应。
3 实验及讨论
3.1 系统背景噪声
在原子力显微镜扫描过程中,系统电子学噪声在很大程度上影响着扫描图像的精度。图3是以PC104为核心的控制系统电子学噪声,约150 mV;图4是以DSP_FPGA为核心的控制系统电子学噪声,约10 mV.对比可见,DSP_FPGA控制系统具有更高的精度,对大范围快速原子力显微镜实现无损式的图像扫描鉴定了基础。

图3 基于PC104系统的电子学噪声(Ch1)

图4 基于DSP_FPGA系统的电子学噪声(Ch4)
3.2 系统测试
为了验证扫描系统的快速性,模拟扫描光栅样品表面的工作过程,对大范围快速原子力显微镜做实验测试。测试方法为:信号发生器输出不同频率、不同幅值的方波信号(此方波信号用来模拟光栅样品表面)激励下扫描器,输出的误差信号经过控制系统的闭环反馈控制输出,从而驱动上扫描器跟踪此方波信号。
(1)图5是系统对频率为10 Hz的方波信号的跟踪波形。从图中可以看出,上扫描器的响应效果较好,可快速跟踪误差信号的变化,在信号发生突变时无明显的失稳情况。
(2)图6是系统对频率为50 Hz的方波信号的跟踪波形。从图中可以看出,上扫描器的跟踪速度较快,但在信号发生突变时,跟踪波形会产生小幅畸变。
(3)图7是系统对频率为100 Hz的方波信号的跟踪波形。从图中可以看出,上扫描器的可快速跟踪误差信号的变化,但是在信号发生突变时,会有明显的畸变。

图5 跟踪波形(10 Hz)

图6 跟踪波形(50 Hz)

图7 跟踪波形(100 Hz)
由此可见,即使是在扫描速度较高的情况下,基于DSP_FPGA的高速高精度控制系统依然可以快速的跟踪控制误差信号。可以预见,对于标准光栅样品的图像扫描速度亦可设置的较高。
4 结论
文中为大范围快速原子力显微镜设计了基于DSP_FPGA的高速高精度控制系统。实验结果显示:与以PC104为核心的控制系统相比,以DSP_FPGA为核心的控制系统电子学噪声大大减小;且通过对大范围原子力显微镜的跟踪实验测试,进一步验证了以DSP_FPGA为核心的控制系统的快速数据处理能力,且此控制系统在低频时具有较高的精度。综上所述,以DSP_FPGA为核心的控制系统为大范围快速原子力显微镜得到更快速度,更高分辨率的扫描成像鉴定了坚实的基础。
[1] FANTNER G E,BARBERO R J,GRAY D S,et al.Kinetics of antimicrobial peptide activity measured on individual bacterial cells using high-speed atomic force microscopy .Nature Nanotechnology,2010(5):280-285.
[2] UCHIHASHI T,IINO R,ANDO T,et al.High-speed atomic force microscopy reveals rotary catalysis of rotorless F1-ATPase.Science,2011,333 :755 - 758.
[3] SCHITTER G,RIJK W F,PHAN N.Dual actuation for high-bandwidth nanopositioning .Decision and Control,2008:5176 -5181.
[4] YAN Y,WU Y,ZOU Q Z,et al.An integrated approach to piezoactuator positioning in high-speed atomic force microscope imaging.The Review of Scientific Instruments,2008,79(7):073704 -073713.
[5] FLEMING A J.Dual-stage vertical feedback for high-speed scanning probe microscopy.IEEE Transactions on Control Systems Technology,2011,19(1):156 -165.
[6] 陈代谢,殷伯华,林云生,等.大范围扫描原子力显微镜自动调平控制技术.仪器仪表学报,2011,32(1):225 -229.
作者简介:邓卫梅(1989—),硕士研究生,主要从事精密仪器仪表的测试和控制系统的设计研究。E-mail:dengweimei@mail.iee.ac.cn薛虹(1956—),高级工程师,主要从事电子束曝光机电机电气控制和计算机控制方面的研究。E-mail:xuehong@mail.iee.ac.cn
《管道技术与设备》编辑部启用稿件采编系统
为适应期刊发展现代化的需要,更好地为作者、读者提供高质量的服务,本刊已于2013年9月启用网上稿件采编系统。作者可在注册后登录系统进行投稿、查询等操作。
《管道技术与设备》网址为:http://www.52gdw.com。欢迎作者踊跃投稿!
《管道技术与设备》编辑部
High-speed High-precision Control System Design for Large-range High-speed AFM
DENG Wei-mei1,2,XUE Hong1,CHEN Dai-xie1,YIN Bo-hua1,HAN Li1
(1.Institute of Electrical Engineering,Chinese Academy of Sciences,Beijing 100190,China;2.University of Chinese Academy of Sciences,Beijing 100049,China)
As the atomic force microscopy is difficult to achieve high-speed, high-precision and large-range scanning simultaneously, some atomic force microscopes with two-stage scanner appear gradually.Based on the large-range and high-speed atomic force microscopy (including two scanners) developed by our laboratory,a high-speed high-precision control system using DSP_FPGA as the core was designed.For crucial designs,the data transfer mode and mutual configuration between DSP and FPGA were presented in details.Then PI controller was implemented to validate the efficiency of this control system.The improved performance of the new control system was experimentally demonstrated finally.
AFM;DSP;FPGA;FIFO;PID;noise
邱贺(1980—),工程师,主要研究方向为传感器技术与仪器仪表。E-mail:qiuhe1980@126.com 段永红(1963—),研究员,主要研究方向为地球内部结构及动力学.
国家863计划资助项目(2012AA041204);国家科技支撑计划资助项目(201BAK15B00)。
2013-10-28 收修改稿日期:2014-11-10
TM93
A
1002-1841(2015)01-0053-03
