联合船机电系统的舰船自主控制模型研究
2015-06-05岳林
岳 林
(中国舰船研究设计中心,湖北 武汉 430064)
联合船机电系统的舰船自主控制模型研究
岳 林
(中国舰船研究设计中心,湖北 武汉 430064)
船机电系统为舰船任务执行提供必要的服务支持,如水、电、油以及机动性,是舰船其他系统以及整个舰船正常工作的基础,而现今船机电系统大多依旧基于“人在回路”传统方式进行控制及决策,增加了对人员配置的需求和运行成本。为此,结合大型水面舰艇船机电系统物理模型特征,提出了一种基于功能接口的分层建模仿真方法,建立了联合船机电系统的自主控制模型,实现船机电系统作业模式与损害管制方式从传统基于人员运行向自主运行转变。仿真实验表明,使用该模型可使船机电系统平台具备正常、故障和损害情况下无人监督时自适应性重构与自主执行能力,有效提高舰船平台自动化水平与整体生命力。
船机电系统;联合模型;自主控制;分层建模
0 引 言
现今的常规舰船通常具有独立的舰载推进和电力系统,以及与其他舰载武器和平台设施关联的集中式监控系统。在这种体系框架下,几乎所有的海军常规舰船依旧使用“人在回路”通信及决策技术,增加了对人员配置的需求和运行成本。例如代表现役常规动力舰船最先进水平的美“阿利·伯克”级IIA型驱逐舰(DDG 85及其后续),虽然经过了多轮技术升级与减员设计,仍需配置舰员276名[1]。
对此,美海军提出综合机电平台(Integrated Engineering Plant, IEP)[2]概念,并在DDG 1000驱逐舰应用实现。其利用遍布全舰的传感器和执行器,通过良好设计的自主控制集成平台转变舰船的运行模式——从基于人员的运行转变为自主或自动的运行,从而大幅减少人力需求(全舰仅148人),并极大地增强自动重构和损害管制能力,相比传统战舰低效脆弱的基于人员的重构工作和损害管制方式,明显提升整个舰船的生命力和任务效能。
以1987年濒海战斗舰UUS Stark(FFG 31)被1架伊拉克Mirage战斗机发射的“飞鱼”导弹击中事件为例,损害管制组花费了大约50 min的时间才部分恢复了破裂的消防水管,而此时火势已快速蔓延。又过了大约1小时,所有发动机不得不关闭。大火持续了大约12 h,雷达室和战斗信息中心已烧成灰烬,并造成了37名人员伤亡。事实上,代表当前美国海军先进水平的“阿利·伯克”级驱逐舰(DDG 51)和“提康德罗加”级巡洋舰(CG 47)在损害管制方面与FFG 31一样差[3]。
而DDG 1000中的IEP平台进行了系统级联灾难避免设计,并最大化舰船损害时的生命力。基于人员的损害管制策略通常人员反应时间大约为小时级别,最快也要几十分钟,而自主控制平台能够立即提供隔离紧急故障如燃料管、电力线、冷却系统、消防水管的破裂或损坏的反应行动,并在极短时间内完成系统自动重构,持续为舰船关键系统运行提供所需资源。
与国外已基本实现大型舰艇自主控制平台工程应用相比,国内尚仅限于无人机[4]、无人艇[5]等小型无人平台研究,主要侧重于无人平台在突发事件中的路径规划/重规划,工程应用亦处于起步阶段。如海事局主持的“水面无人智能测量平台”参与了2013年第2次南海巡航,初步实现了遥控与远距离自主导航航行、水面及水下障碍的自动避障避碰以及相关海洋多要素综合测量应用。虽然与大型舰艇相比,小型无人平台的系统相对简单,实现的任务相对单一,但是其相关成果可以借鉴参考。
而在大型舰艇方面,国内主要集中在船舶机舱自动化、导航自动化、避碰避障等方面。如上海船舶运输科学研究所研制基于现场总线的船舶自动化系统[6],较好地解决了监控实时性要求与多终端要求并存的需求。大连海事大学推出了综合船桥模拟器[7],研制成功了基于自抗扰控制技术的自动操舵仪[8]。然而,这些成果仍是基于以人为主的运行控制模式或是单项成果突破,尚无多系统协同与自主控制的应用研究,大型水面舰艇自主控制平台研究还是与国外存在显著差距。
为此,本文针对综合电力推进舰船应用背景,结合大型舰艇船机电系统物理特征,提出了一种基于功能接口的分层建模仿真方法,建立了联合船机电系统的自主控制模型,实现大型舰艇船机电系统作业模式与损害管制从传统基于人员运行向自主运行设计转变,使舰船在现代化海战场环境中“整体上”呈现自适应性与自主执行能力,降低舰员的工作强度、减少舰员数量,提高舰船综合任务效能。
1 船机电系统联合物理模型分析
军舰船机电系统为舰船平台的正常运行提供必要的服务支持,如水、电、油以及机动性,是舰船其他系统以及整个舰船正常工作的基础。
为此,船机电系统通常由多个不同领域的、相互依赖的、复杂的子系统组成,并且系统的部件、设备遍布全船,是一个大型分布式复杂系统,为实现船机电系统联合自主控制,首先在需构建船机电系统的集成工程模型,描述船机电系统运行过程中的动态行为以及控制对其动态行为的影响。而船机电系统中对于舰船生存性和可恢复性最关键的系统包括冷却水系统、消防系统、区域配电、发电和推进以及有关传感器和执行机构的数据网络。
那么,整个船机电系统可描述为电力系统和流体系统2个物理系统模型以及IEP自主控制系统模型。综合电力系统为舰船运行产生和分配电力,流体系统为电力系统设备制冷和安全运行提供支持,控制系统则负责实现与舰船操作相关的任务并保证任务效能、增加生存性和可重配置性。IEP可以概念化为一组相互依赖的资源分配网络,这些网络以不同的方式分配电力、流体和数据,如图1所示。
这3个网络模型以下面的形式协同工作:
电力网络由综合电力系统不同区域的供配电设备与电力负载组成。舰船会根据作战使命和不同任务阶段,动态地使用这些电力负载。
流体网络由热能变换器、泵、阀和相应的管道组成。热能变换器吸收由电力系统负载产生的热能,热流体被引入管道系统,管道系统将流体送入到海水冷却器中进行制冷。通常流体是通过泵和阀引入到管道系统中,阀需保证对每个发热负载热能变换器的合理资源需求分配。

图1 IEP网络Fig.1 IEP networks
控制网络由控制电力开关和阀的控制器组成。电力开关控制器必须保证根据任务需求可为任务所有的关键负载提供足够的电力资源,而阀控制器则必须保证发热负载具备足够的冷却水供应,特别是在电力网络或流体网络损伤的情况下资源分配必须依然有效。例如舰船战损后,流体系统部分破损,控制器必须保证破损被隔离(防止冷却液体泄漏),同时剩下的系统必须保障关键发热负载的冷却需求。这种相互依赖关系如图2所示。
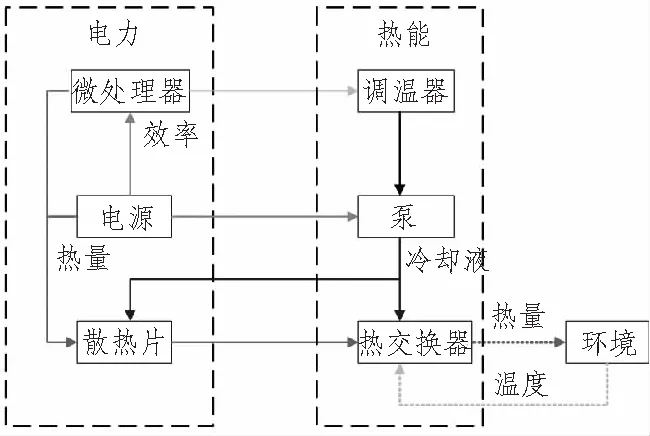
图2 热能/电力系统相互关系映射Fig.2 Correlation mapping of thermal/power system
而由于电力和流体模型基于2个完全不同的领域,几乎完全隔离。但如果2个模型完全独立,则假设所有来自其他模型的输入不变,这显然与实际相违背。因此联合物理建模需考虑流体与电力系统之间的交互反馈,对整个船机电系统的状态变化与控制过程进行建模。系统的物理学模型描述示意如图3所示。
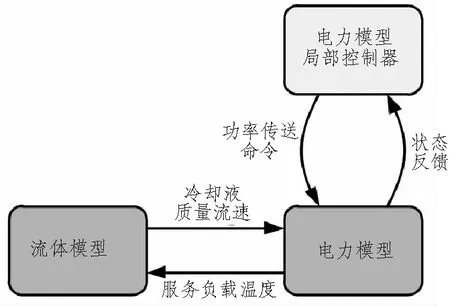
图3 物理学模型描述Fig.3 Description of physics model
2 基于功能接口的分层建模方法
结合上节阐述的网络模型,本节采用分层的仿真建模方法,将每个子系统表示在一个独立层中,并描述该层与其他层相连的输入输出接口。舰船IEP分层建模如图4所示,不同层包含系统整体行为的不同方面,包括空间层、控制层、流体层和热能层。此方法具备足够的灵活性,随着对象行为模型的增加,可以加入新的层。

图4 分层建模方法Fig.4 Layered modeling approach
空间层:描述了IEP每个部件的地理位置,这种描述和信息主要用于在武器击中事件确定哪些部件能在事件中生存。
控制层:描述管理IEP部件运行的监视控制器的模型,该层结合从其他层获得的信息决定一个特定的设备何时可以运行,也包括检查设备是否在武器事件中生存。
电力层:描述电力系统中2个交流网络和直流区域配电网络的模型,确定功率分配。
流体层:对流体网络建模,确定流体网络各节点和支路的压力和流量。
热能层:对通过热交换器和淡水冷却环的热流量进行建模。
事实上,一个舰船系统部件经常同时存在于多个层中,每层具备部件行为的不同方面。以直流区域配电网络中的一个变换器为例,其传统的电力模型位于电力层,但是其物理位置表示成为在空间层的一个长方体,变换器控制器模型存在于控制层,变换器电子设备由处于热能层的淡水冷却环冷却。
可见,分层建模方法分割了一个独立部件的行为逻辑上的界限。这种分割有助于处理包含在这样相互依赖系统的建模和仿真中的复杂性问题。此外,还能够通过允许松耦合层采用不同集成算法和时间步仿真来提高效率,例如对较快的电力动态特性与较慢的热能动态行为分别进行仿真。
1)空间层建模
空间层建模将舰船部件表示成几何物体,从而确定一个空间上的事件(如局部爆炸)对于整个IEP性能的影响。尤其是可以确定在一个事件(如反舰导弹爆炸)中哪个部件会损坏。
以局部爆炸事件为例,可定义如图5的笛卡儿坐标系。原点位于舰船的基线和首垂线的交叉处。X轴正方向朝着船尾,Y轴正方向为右舷,Z轴正方向朝上。爆炸表示成一个球心为d=(xd,yd,zd)、 半径为rd的球形。任何在空间层用几何物体表示的部件与球形交叉,则认为该部件被导弹击中损坏。空间层模型的主要功能就是确定部件的击中状态。

图5 空间层模型坐标系Fig.5 Cartesian coordinate of space model
空间层可采用点、多边路径、长方体来表示系统阀门开关、电缆及管道、设备。
① 阀门开关建模
相对于爆炸半径rd非常小的部件表示为点,如各类阀。可计算从点c=(xc,yc,zc)到爆炸中心d的距离,比较该距离与爆炸半径rd确定击中状态。
h=(‖c-d‖≤rd)。
(1)
② 电缆及管道建模
舰船平台中信号、电线以及流体管道,都可建模表示成一组有限数目的线段,通过判断ns条线段的每一条路径与爆炸是否有交集而确定是否被击中。第s条线段的终点为cs=(xc,s,yc,s,zc,s)和cs+1=(xc,s+1,yc,s+1,zc,s+1)。
通常情况下cs+cs+1,那么在点cs和cs+1的连接线上的任意一点可以表示成为c=αcs+(1-α)cs+1。 如果α∈[0,1],那么该点c在这条线段上。为确定该线段上与爆炸中心最近的点,需要使与α相关的F=‖c-d‖2最小。
(2)
将α投影到[0, 1]上产生线段上距离爆炸中心最近的点c, 即可用式(1)确定该段是否被损毁。
③ 设备建模
大多数的舰载设备都可以表示成为一个三维空间中的长方体,例如推进驱动器。长方体表示成中心为c=(xc,yc,zc),长、宽、高为Δ=(Δx,Δy,Δz)。 可将爆炸中心p投影到长方体中,判断距离d最近的点e距离,采用式(1)确定交叉情况,从而确定该长方体是否被击中。
e=‖p-d‖。
(3)
2)控制层建模
控制层包含系统中所有监视控制器的模型,确定相关部件的运行状态O,主要包括部件的击中状态,输入和输出功率以及设备温度。
每个控制器决定它可能启动相关设备以及有必要停止相关设备的时间,其构造一个启动和一个停止信号,分别为α和β。那么基于α或者β的任何改变,设备的运行状态如下式:
(4)
以发电机控制器为例,发电机控制器确定发电机运行需满足已启动、没有被击中、其输出功率在其最小和最大瞬时功率容量之间并且没有过热。
3)电力层建模
IEEEstd1709-2010提供了一个舰船中压直流电力系统的理论拓扑结构,其由2个36MW的主燃气轮机发电机组和2个4MW的辅燃汽轮机发电机组提供80MW的电力。本文参考其拓扑结构,从功率的角度构建电力系统模型,令一主一辅发电机组(G1,G2)与每条纵向总线相连,每条总线上连接一个推进电机驱动逆变器(PD1),采用直流区域配电,并忽略负载类型,将所有电力系统部件构建为功率模块,并将全舰负载(L3-L5)、 储能装置(ES3-ES5)分为首中尾3个区域接入,由左舷和右舷直流总线供电,得到综合电力系统的简化网络模型如图6所示。

图6 电力系统网络模型Fig.6 Electric system network model
4)流体层及热能层建模
舰船电力部件主要通过流体网络基于淡水冷却、海水冷却和冷冻水冷却3种方式冷却。淡水冷却主要用于电力变换模块冷却或者电子设备冷却;海水冷却通过海水冷却系统直接冷却设备,主要用于发电模块、配电模块、空调和蒸汽冷凝器;而冷冻水冷却主要用于舱室和设备的冷却。
本文选择海水作为二级冷却剂的淡水冷却方法,结合上节提出的电力系统网络模型,将流体网络划分为海水网络和淡水环系统2个部分(3个区域),如图7和图8所示。
如图7所示,海水网络包括节点(SeawaterNodes,SWNs)、阀(SeawaterValves,SWVs)、支路(SeawaterBranches,SWBs)、泵(SeawaterPumps,SWPs)、部件热交换器(ComponentHeatExchagers,CHXs)及淡水环(FreshwaterLoops,FWLs)。在舰船的每个区域,由SWPs向海水网络提供压力,CHXs通过海水网络直接冷却较大负载(尤其是发电机和推进驱动器),而FWLs冷却较小的负载。
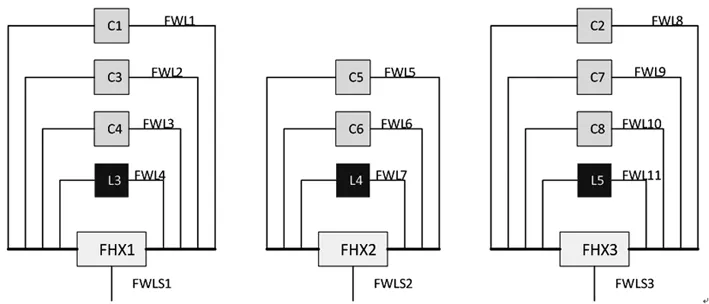
图8 淡水环系统模型Fig.8 Freshwater loop system model
如图8所示,淡水冷却环系统(FreshwaterLoopSystem,FWLS)每一个组件由一个FWL冷却,FWLs汇聚到一起由一个流体热交换器(FluidHeatExchanger,FHX)冷却,而FHX由海水网络冷却。
5)舰总体布局建模
结合上述划分的3个区域电力、流体网络模型,即可针对电力系统设备、流体网络设备、电缆及管路、控制器部件开展舰总体布局建模。自主控制平台部件位置模型如图9所示。
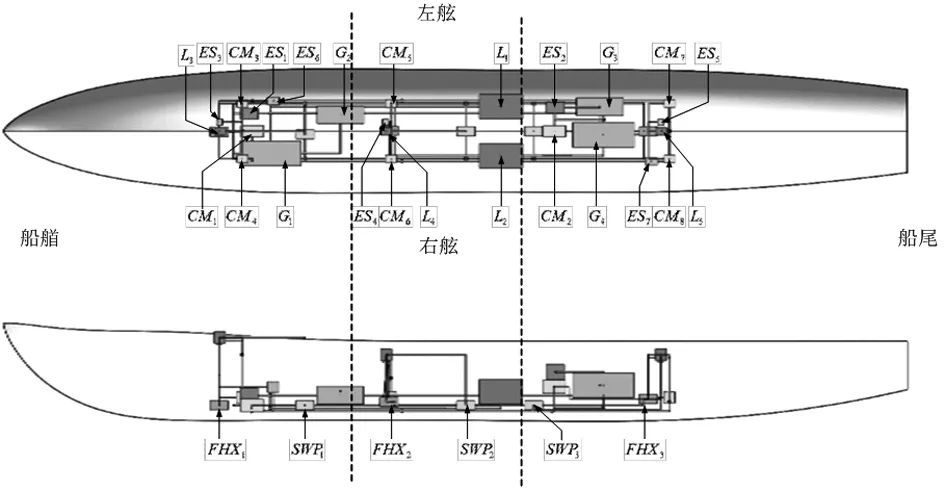
图9 自主控制模型布局Fig.9 Layout of autonomous control model
3 自主控制模型仿真验证
为证明该分层建模方法的有效性,本文采用Simulink搭建上述模型,进行时域仿真验证。自主控制模型仿真框图如图10所示。
设定各部件依次启动,待部件进入稳定状态后,在t=300 s时引入一个爆炸事件,该爆炸事件在空间层表示成为一个球体,该球体半径为rd=2.0m,球心位于(xd,yd,zd)=(50.0,0.0,4.0)。 根据式(1)可以确定该爆炸事件损坏了发电机G1、泵SWP1、SWP1的电线以及海水网络的支路SWB7和SWB12。

图10 Simulink环境下IEP模型仿真框图Fig.10 Simulating plot of IEP model in simulink
爆炸事件后,IEP系统发生级联故障,由于SWP1损坏,负责冷却淡水环的流体热交换器FHX1停止工作,无法再冷却区域1的部件,区域1直流部件温度一直升高到365K(过热点)。为此,C3和C4在大约t≈352 s时关闭,不能再向直流区域1的负载L3提供服务。然后,区域1能量存储单元ES3能够为L3提供服务直到t≈510 s时,L3由于过热关闭。而在C3和C4由于过热关闭而离线后,C1继续运行直到t≈404 s时过热关闭。由于泵SWP1损坏,为G1和G2提供冷却的热交换器CHX1不能够被冷却了,而G2依然运行并持续产生热量,直至t≈1 960 s时,G2由于过热关闭离线。
图11直观地表现了系统的故障级联行为,黑色的长方体和线表示相关部件在爆炸中损坏或在爆炸后因系统故障级联而停止运行。

图11 系统故障级联行为Fig.11 Cascaded action of system failure
G1在爆炸事件发生后立即停止运行并离线,G2在t≈1 960 s时离线,而其他发电机继续运行,图12给出了发电机G3和G4的相关功率情况。

图12 G3,G4发电机功率仿真结果Fig.12 Simulating result for dynamo power G3-G4
如图13所示,尽管在爆炸事件后,G1因损坏停止运行,但自主控制模型能够重构自动为系统负载提供持续的电力服务。唯一例外的是L3,因为一条海水支路由于爆炸损坏不能再为L3所在的区域的流体热交换器FHX1提供冷却海水,从而L3在t≈510 s时过热关闭。

图13 负载输入功率仿真结果Fig.13 Simulating result for load input power
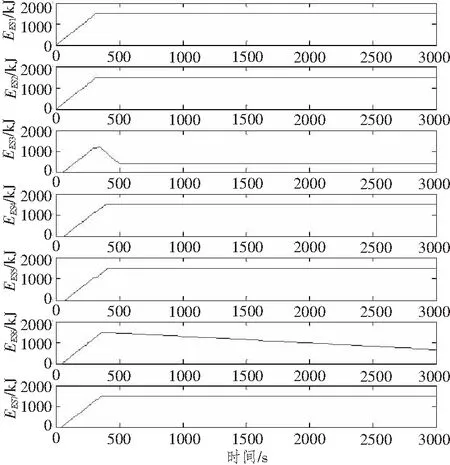
图14 能量存储单元仿真结果Fig.14 Simulating result for energy storage
图14表示的是能量存储单元的能量,可以看到能量存储单元在发电机以及相应的变换器启动后充电,当充满电后停止充电。位于区域1的ES3在C3和C4停止工作后放电为负载L3供电,直到t≈510 s时L3因过热关闭。
热能层部件温度如图15所示。在爆炸事件发生后,由于泵SWP1损坏不能为CHX1和区域1的FHX1的正常工作提供冷却用水,因此温度上升直到过热点,其对应冷却的部件也因此停止工作。这与前面分析的各部件的工作情况相符。
由以上仿真结果及分析可以看到,IEP自主模型能够在正常、故障、损伤情况下能够通过自动重构尽可能保障优先级高的用电负载的需求,这也正是自主控制平台将区域配电方式与自主控制技术结合提高舰船生命力的重要技术途径。


图15 热能层部件温度Fig.15 Temperature for thermal layer parts
4 结 语
综上所述,采用舰船自主控制模型可联合船机电系统,使具备在正常、故障和损害情况下无人监督时自感知、自评估、自决策和自反应的能力,从而使舰船在现代化海战场这种复杂环境中“整体上”呈现自适应性与自主执行能力,可降低舰员的工作强度、减少舰员数量,提高舰船的任务效能。
[1]HILARYHS.TransforminglegacysystemsforthemodernizedDDGpreliminarydesigncasestudy[C]//NavalEngineeringforJointandCoalitionRapidMaritimeResponse.USA,April,2005:26-27.
[2]WALKSJP,MEARMANJF.“Integratedengineeringplant,”presentedatASNEReconfigurationandSurvivabilitySymposium2005,Feb,2005.
[3]NOELM.ANGELES.Battledamagecontrolsystemintegration[D].2010.
[4] 陈宗基,张汝麟,张平,等.飞行器控制面临的机遇与挑战[J].自动化学报,2013(6):703-710.
[5] 孙巧梅.无人艇建模及逻辑网络自适应控制方法的研究[D].大连:大连海事大学,2013.
[6] 陆嘉明,李承祖.船舶机舱自动化在中国的发展回顾[J].上海船舶运输科学研究所学报,2012(2):1-3.
[7] 孙昱浩.航海模拟器中冰区航行视景的研究[D].大连:大连海事大学,2011.
[8] 邱琦.基于自抗扰控制技术的自动操舵仪的设计与实现[D].大连:大连海事大学,2012.
Research on autonomous control model for federation of HM&E system
YUE Lin
(China Ship Development and Design Center,Wuhan 430064,China)
Hull mechanical & electrical (HM&E) System provide services to the ships which are vital to completing its mission, such as water, electric power, oil and mobility.Because mostly based on ‘human in loop’ tradition mode to control and decide, it need more personnel requirement and run cost.Therefore, combined with the feature of surface warship HM&E system physical model, a layered modeling and simulating method based on function interface is proposed, and then a autonomous control model for federation of HM&E system is established to change operation mode and damage control mode from traditional human based running to autonomous running.The simulation results have shown that using this model could make HM&E System have adaptive reconstruction and autonomous execution ability in unmanned condition of normal, fault and damage, effectively improve automation level and the overall vitality for ship platform.
hull mechanical & electrical (HM&E) system;joint model;autonomous control;layered modeling
2015-04-14;
2015-05-15
国家自然科学基金资助项目(61303238)
岳林(1982-),男,博士,工程师,研究方向为舰船信息化与智能控制。
TP393.03
A
1672-7649(2015)12-0072-07
10.3404/j.issn.1672-7649.2015.12.015