DC-DC Boost变换器控制算法的研究
2015-06-01杨玉岗甘汶桦
杨玉岗,甘汶桦
(辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛125105)
DC-DC Boost变换器控制算法的研究
杨玉岗,甘汶桦
(辽宁工程技术大学电气与控制工程学院,辽宁葫芦岛125105)
为了改善DC-DC Boost变换器的性能,在电压控制模式的基础上,设计了PI控制器,对输出电压进行控制。分析了DC-DC Boost变换器的基本原理,推导了变换器的传递函数。本文用Ziegler-Nichols方法和Loop-Shaping方法计算出PI控制器中Kp和Ki的值,进而通过Matlab仿真和实验,比较了两种方法的输出响应,得出结论:采用Loop-Shaping方法能更好改善变换器的性能。
传递函数;PI控制器;Ziegler-Nichols方法;Loop-Shaping方法
1 引言
DC-DC开关电源具有高效率、高功率密度和高可靠性等优点[1-3],现已被广泛地应用于通信、计算机、工业设备、家用电器等领域[4-6]。Boost变换器作为DC-DC变换器的一种,用来增加直流电压,主要用于各种输出电压大于输入电压的直流升压场合。开环调节操作简单,但无反馈点不能构成回路,稳定性差。而闭环调节可以实现反馈,稳定性好,所以闭环控制方式常作为各类变换器的控制策略[7-10]。本文设计了PI控制器,用来调节变换器的输出电压,进而提高稳态精度。同时,用Ziegler-Nichols方法[11,12]和Loop-Shaping方法[13,14]求出Kp和Ki的值,并将两种方法的值代入PI控制器中。最后,对DC-DC Boost变换器进行Matlab仿真和实验,结果表明所提控制方法可以改善变换器的性能。
2 Boost变换器的基本原理
基本Boost变换器的原理图如图1所示,L为电感,C为输出电容,R为负载,iL(t)为流经电路的电流。开关管M在Ton期间导通,在Toff期间关断,导通时间Ton和关断时间Toff组成一个完整的周期Ts。Vi为直流输入电压,Vo为Boost变换器的输出电压,且大于Vi。

图1 DC-DC升压变换器的电路原理图Fig.1 Circuit schematic of step-up DC-DC converter
本文研究电感电流连续的情况,并对变换器进行闭环PI控制。根据能量传输模式将变换器分成两种模态。
模态1(0~Ton):t=0时刻,开关管M导通,二极管D截止,此时加在电感L上的电压为Vi,电感电流iL线性增加。
模态2(Ton~Ts):t=Ton时刻,开关管M关断,二极管D开始续流,此时电感L上的电压为Vi-Vo,电感电流iL线性减小。由伏秒平衡定律得:

式中,Ton为开关导通持续时间;Toff为开关关断持续时间。Boost变换器输入电压和输出电压的关系为:

式中,D为占空比。
3 数学表达式
3.1 Boost变换器的传递函数
当开关管M导通,电感电流iL线性增长,并在导通Ton期间的最后时刻达到ILmax。输入电压与电感电流关系为:

对式(3)进行拉普拉斯变换:

对Vo进行拉普拉斯变换:

由式(4)和式(5)得:

式(6)为Boost变换器最基本的拉普拉斯变换式。
3.2 闭环系统的传递函数
为了得到期望的变换器,需准确测量输出电压,并让其保持在目标值,所以变换器需要加入反馈环节,PI控制器的结构框图如图2所示。

图2 PI控制器的结构框图Fig.2 Schematic of PI controller
Vo(s)为闭环系统的输出响应,它和参考电压Vref比较后送到PI控制器,然后加上输入电压Vi,进而得到期望的值,由图2得:

取Vref=0,有:

式(9)为PI控制器的传递函数。
4 仿真与实验
设置仿真和实验参数:输入电压为30V,输出电压为50V,占空比为0.4,电感L为50μH,电容C为50μF,开关频率为100kHz。当Boost变换器无PI控制器时稳态误差为25%,而有PI控制器时可以明显提升Boost变换器的性能。用Ziegler-Nichols方法和Loop-Shaping方法求出PI控制器中Kp和Ki的值,分别进行仿真和实验。
4.1 仿真
建立仿真模型,利用Matlab对系统进行仿真,将阶跃函数应用于系统中,并分析输出响应,用Ziegler-Nichols方法[10,11]求得Kp和Ki的值分别为:

把Kp和Ki的值代入PI控制器进行仿真,得到输出响应波形。图3为理想情况下,没有考虑电感、电容寄生参数影响时的仿真波形。起初输出发生了大幅度振荡,造成很大的峰值,过了4s响应趋向平稳,此时稳态误差才基本被消除。图4为考虑了电感、电容寄生参数影响时的仿真波形,修正后的响应振荡幅度大为减小,稳态误差几乎被消除。
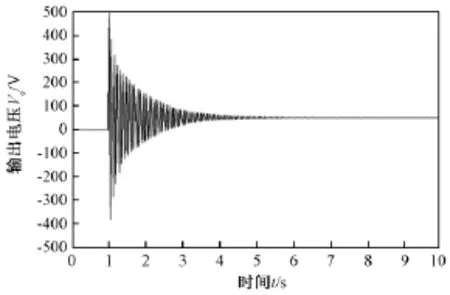
图3 Ziegler-Nichols方法的仿真波形Fig.3 Simulation waveforms of Ziegler-Nicholsmethod
同理,用Loop-Shaping方法,结合式(9)可得两组关系[12,13]:

式(10)中,ξ取值为0.7,Kp和Ki值很大[14],取:
把Kp和Ki的值代入PI控制器进行仿真,得到输出响应波形。图5为理想情况下,没有考虑电感、电容寄生参数影响时的仿真波形,其中稳态误差几乎被消除,且没发生明显振荡,纹波较小。图6为考虑了电感、电容寄生参数影响时的仿真波形,修正后的稳态误差被消除,纹波很小。所以,仿真结果表明,用Loop-Shaping方法能更好地改善变换器的性能。

图4 Ziegler-Nichols方法的修正仿真波形Fig.4 Improved simulation waveforms of Ziegler-Nicholsmethod
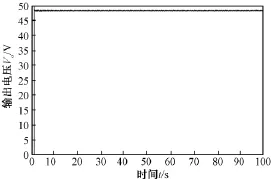
图5 Loop-Shaping方法的仿真波形Fig.5 Simulation waveforms of Loop-Shapingmethod

图6 Loop-Shaping方法的修正仿真波形Fig.6 Improved simulation waveforms of Loop-Shapingmethod
4.2 实验
制作试验样机,实验中采用4.1节中的参数,得到输出响应的实验波形,图7为Ziegler-Nichols方法的实验波形,图8为Loop-Shaping方法的实验波形。

图7 Ziegler-Nichols方法的实验波形Fig.7 Experimentalwaveforms of Ziegler-Nicholsmethod
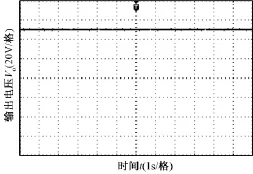
图8 Loop-Shaping方法的实验波形Fig.8 Experimentalwaveforms of Loop-Shapingmethod
5 结论
本文分析了DC-DC Boost变换器,分别采用Ziegler-Nichols方法和Loop-Shaping方法得到输出响应,有以下结论:
(1)无PI控制器的Boost变换器稳态误差高达25%。
(2)有PI控制器的Boost变换器用Ziegler-Nichols方法仿真在3s后几乎消除稳态误差,但起初产生了一定的振荡和较大的峰值,最大峰值超调达到200%,所以这种方法不符合要求。
(3)有PI控制器的Boost变换器用Loop-Shaping方法既消除了稳态误差,也大大缓解了振荡。且Loop-Shaping方法产生的纹波远远小于Ziegler-Nichols方法产生的纹波。
综上,DC-DC Boost变换器的仿真和实验结果表明,采用Loop-Shaping方法能够明显改善变换器的性能。
[1]刘福鑫,潘子周,阮新波(Liu Fuxin,Pan Zizhou,Ruan Xinbo).一种Boost型双向桥式直流变换器的软开关分析(Soft-switching analysis of a Boost-integrated bidirectional active bridge DC/DC converter)[J].中国电机工程学报(Proceedings of the CSEE),2013,33 (3):55-61.
[2]孟培培,吴新科,赵晨,等(Meng Peipei,Wu Xinke,Zhao Chen,etal.).一种新型临界模式控制的变频软开关全桥DC/DC变流器(A novel variable frequency soft switching full-bridge DC/DC converter with critical continuousmode control)[J].中国电机工程学报(Proceedings of the CSEE),2012,32(6):106-112.
[3]吴红飞,邢岩,胡海兵,等(Wu Hongfei,Xing Yan,Hu Haibing,et al.).副边调整式三端口半桥DC-DC变换器(Three-port half-bridge DC-DC converters with post regulation scheme)[J].中国电机工程学报(Proceedings of the CSEE),2011,31(30):1-6.
[4]刘锦波,明文龙(Liu Jinbo,Ming Wenlong).一种基于输入/输出反馈线性化的Boost型DC/DC变换器非线性控制方案(A novel scheme of nonlinear control strategy based on input-output linearization for Boost type DC/DC converter)[J].中国电机工程学报(Proceedings of the CSEE),2010,30(27):55-61.
[5]佟强,张东来,徐殿国(Tong Qiang,Zhang Donglai,Xu Dianguo).分布式电源系统中变换器的输出阻抗与稳定性分析(Output impedance and stability analysis of converters in distributed power systems)[J].中国电机工程学报(Proceedings of the CSEE),2011,31 (12):57-64.
[6]童亦斌,吴峂,金新民,等(Tong Yibin,Wu Tong,Jin Xinmin,et al.).双向DC/DC变换器的拓扑研究(Study of bi-directional DC/DC converter)[J].中国电机工程学报(Proceedings of the CSEE),2007,27 (13):81-86.
[7]梁永春,许丽川,严仰光(Liang Yongchun,Xu Lichuan,Yan Yangguang).一种双闭环控制隔离Boost变换器起动控制策略(New start-up schemes for isolated Boost converter in double close-loop control)[J].中国电机工程学报(Proceedings of the CSEE),2010,30(24):15-20.
[8]张旭辉,温旭辉,赵峰(Zhang Xuhui,Wen Xuhui,Zhao Feng).电机控制器直流侧前置Buck/Boost双向变换器的母线电容电流控制策略研究(Research on the bus capacitor current control scheme for Buck/Boost bi-directional converters in motor drive systems)[J].中国电机工程学报(Proceedings of the CSEE),2012,32(30):23-29.
[9]Anusuya R M,Saravanakumar R.Realization of a single phase matrix converter with reduce switch count as a Buck/Boost rectifier with close loop control[A].2012 International Conference on Computing,Electronics and Electrical Technologies(ICCEET)[C].2012.218-223.
[10]Brain R Copeland.The design of PID controllers using Ziegler Nichols tuning[J].Journal of Intelligent&Robotic Systems,2008,11(15):121-127.
[11]Meshram P M,Kanojiya R G.Tuning of PID controller using Ziegler-Nicholsmethod for speed control of DCmotor[A].International Conference on Advances in Engineering,Science and Management(ICAESM)[C].2012.117-122.
[12]Fite K B,Liang Shao,Goldfarb M.Loop shaping for transparency and stability robustness in bilateral telemanipulation[J].IEEE Transactions on Robotics and Automation,2004,20(3):620-624.
[13]Astrom K J,Hagglund T.PID controllers:theory,design,and tuning[M].America:Instrument Society of America,1995.
[14]Astrom K J.Adaptive control[M].北京:科学出版社(Beijing:Science Press),2003.
Research on control algorithm of DC-DC Boost converters
YANG Yu-gang,GANWen-hua
(Faculty of Electrical and Control Engineering,Liaoning Technical University,Huludao 125105,China)
To improve the control performance of DC-DC Boost power converters,a PIcontroller is designed to regulate the output voltage based on voltagemode.The basic principle of the DC-DC Boost converter have been analyzed,and the transfer function of the converter have been derived.The paper uses PI controller in which the values of Kpand Kihave been derived using the Ziegler-Nicholsmethod and Loop Shapingmethod,and through Matlab simulation and experiment,the output response of the bothmethods is compared and conclusion ismade that Loop-Shapingmethod can improve the performance of the converter better.
transfer function;PI controller;Ziegler-Nicholsmethod;Loop-Shapingmethod
TM46
A
1003-3076(2015)03-0072-04
2013-04-07
国家自然科学基金(51177067)、教育部留学回国人员科研启动基金(2009-1341)、辽宁省自然科学基金(20102092)资助项目
杨玉岗(1967-),男,内蒙古籍,教授,博导,博士,研究方向为电力电子技术及其磁集成技术;甘汶桦(1989-),男,湖南籍,硕士研究生,研究方向为电力电子技术及其磁集成技术。