基于Labview的无创呼吸机系统的设计
2015-06-01杨卫东陈革吕维敏朱清
杨卫东,陈革,吕维敏,朱清
1.浙江医药高等专科学校,浙江 宁波315100;2.宁波市第一人民医院,浙江宁波 315010;3.浙江省医疗器械研究所,浙江 杭州 310009
基于Labview的无创呼吸机系统的设计
杨卫东1,陈革2,吕维敏3,朱清1
1.浙江医药高等专科学校,浙江 宁波315100;2.宁波市第一人民医院,浙江宁波 315010;3.浙江省医疗器械研究所,浙江 杭州 310009
本文阐述了基于Labview的无创呼吸机系统的设计过程。该系统以Labview及相关的传感器等硬件为平台,其呼吸机界面利用Labview软件的控制件和显示件建立,其各项功能和控制算法利用图形化的数据流形式设计并实现,具有独特的呼吸相检测算法。实际测试结果表明,该系统能够高效地实现呼吸机的各项功能,具有一定的实用价值。
无创呼吸机;Labview;压力流量传感器;呼吸相检测算法
0 前言
呼吸机已从急救设备发展成为呼吸系统疾病的常用治疗设备,无创呼吸机更是已进入普通市民家庭,成为治疗睡眠呼吸暂停综合征等疾病的得力助手[1-2]。无创呼吸机的基本原理为:可根据患者的呼吸相自动提供两种不同压力的气流。因此,对患者呼吸相进行检测有重要的临床价值。
本研究以Labview及相关的传感器等硬件为平台,设计了一种无创呼吸机系统。笔者利用Labview软件丰富的控制件和显示件建立该系统的呼吸机界面,以图形化的数据流形式来设计并实现该系统的各项功能和控制算法,且提出了独特的呼吸相检测算法,报道如下。
1 硬件电路设计
无创呼吸机系统结构框图以及实物图,见图1~2。该系统主要由气体管路和电路系统两部分构成。气体管路由呼吸面罩、呼吸管路、电磁阀及风机构成,其中风机用于提供外部高压气体,通过调节风机转速来调节高压气体所提供的总的气体压力和流量,电磁阀用于调节供给患者的气体流量和压力。由于采用了电磁阀调节,该系统可避免因频繁电机转速调节带来的噪音以及电机调节的惯性滞后等问题。电路系统由压力流量传感器、A/D转换装置、计算机系统、D/A转换及驱动构成,其中压力流量数据经过计算机系统的检测和计算后,再通过D/A转换驱动电路控制电磁阀和风机,然后按照患者的需求设定参数控制电磁阀和电机的通气量[3]。

图1 无创呼吸机系统结构框图

图2 无创呼吸机系统实物图
1.1 流量传感器电路
人机同步是评价呼吸机的重要指标之一,其理想目标是患者能像正常人一样处于无阻碍状态,事实上,至今尚无法完全解决呼吸机人机同步的问题[4]。但是高灵敏的传感器无疑是解决人机同步的必备条件。
该系统流量传感器采用Honeywell公司的AWM92100质量空气流量传感器[5],其量程范围为±200 sccm,输出电压范围为±80 mV。该传感器实质为热式质量流量计,其内部包含热敏电阻与加热电阻,其流量检测电路图,见图3。
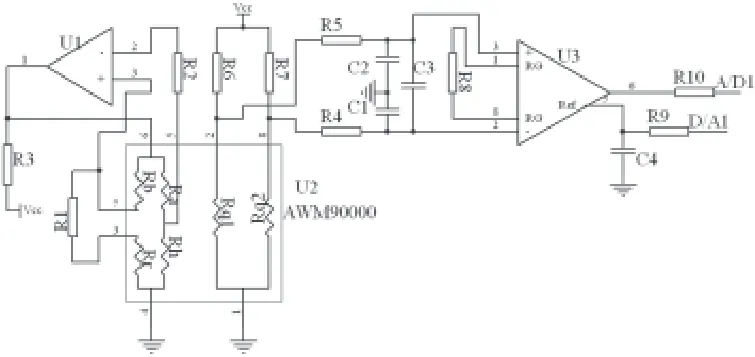
图3 流量检测电路图
集成运放U1、R1、R2、R3以及内部加热电阻Ra、Rb、Rh、Rr构成负反馈式加热器自动控制电路,加热电阻上流过稳定的电流时会产生恒定的功率对管路中的流动气体加热,造成加热点前后两个不同位置的热敏电阻(Rq1 与Rq2)出现温差从而发生阻值变化,使得与两个外接电阻(R6与R7)构成的电桥不平衡,从而产生流量信号。质量流量越大,温差越大,输出的电压差值也越大。该信号经RC低通滤波后,送至精密仪表放大器INA126放大,进入A/D1口,进行模/数转换。由于R6、R7、Rq1、Rq2电桥非严格匹配,并且受环境温差和温度漂移的影响,因此存在一个静态的输出电压,该静态电压影响U3的放大倍数设置,容易造成电路直流阻塞。因此在仪表放大器U3的参考端(U3第5管脚)输出一个D/A1直流偏置,以消除静态电压的影响。
1.2 压力传感器电路
压力传感器电路采用美国SMI公司的SM5651[6],是一种完全校准和温度补偿微差压双列直插高性能压力传感器,其陶瓷基底贴装高稳定压阻式压力传感器芯片,利用陶瓷基板上的薄膜电阻进行零度校正、零点温度补偿和灵敏度温度补偿,其压力检测电路图,见图4。其内部结构为一个四电阻电桥,如图4中元件U4所示,U4的2、4脚为电压激励,在1、3脚输出压力信号;经阻容RC低通滤波后,送至精密仪表放大器INA126中,经放大后进入A/D3口;D/A3为其静态失调电压的调整口。
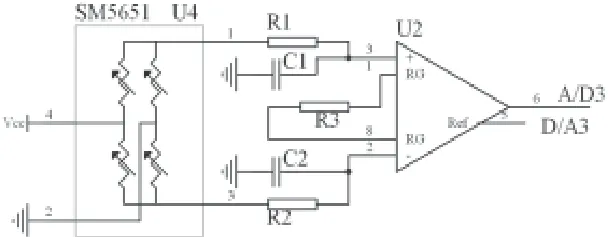
图4 压力检测电路图
1.3 电磁阀控制驱动电路
电磁阀驱动电路采用LM4871音频功率放大器,经放大后驱动电磁阀的线圈改变,控制阀门大小以精确控制供给患者的空气压力和流量的大小。电磁阀控制驱动电路图,见图5。图中D/A5信号为经过控制算法计算后的控制信号。

图5 电磁阀控制驱动电路图
2 软件控制系统
本研究采用虚拟仪器Labview软件为平台,进行软件控制及算法编程。软件部分由程序界面、数据采集、数据平滑、呼吸切换点检测、软件PID控制等构成。
软件系统采用Labview的生产者消费者模型,在系统初始化模块中主要完成电路的硬件检测功能,包括压力传感器的静态偏置检测、流量传感器的静态偏置检测、A/D卡状态检测和状态设置等。在界面参数设置模块中,可进行吸气压力(IPAP)、呼气压力(EPAP)、呼吸时间、呼吸波形显示、报警等参数的设置。系统参数设置完毕后,系统启动数据采集,建立原始数据数组,对数据进行平滑处理,检测呼吸触发切换点,控制电磁阀运动,以达到设定的呼气或吸气的压力流量值。具体的软件流程图,见图6。

图6 软件流程图
为了简化设计过程,本研究采用了NI公司PCI6230A/ D卡,该卡是一款带隔离的多功能数据采集(DAQ)板卡,带有单端8通道或差分4通道的16位A/D通道,动态范围为±10 V,采样率为500 kHz,同时具有4通道16位D/A输出。该板卡可完全满足本研究的设计要求,并能够极大地提高设计效率。
该系统的软件界面图,见图7。该界面包含了吸气压力(IPAP)、呼气压力(EPAP)、呼吸率等的计算结果及压力波形和流量波形的显示等。

图7 系统软件界面图
3 实验及分析
3.1 平滑算法及波形
人的正常呼吸频率为16~20次/min,频率较低,而呼吸机中的流量和压力传感器检测到的噪声信号为高频信号。因此,需要选择合适的低通滤波器对模拟电路滤波进行补充。本文选取的滤波器为移动平均滤波器,其原理为:将连续的采样数据分成一段固定长度为N的一维数组。测量得到新数据后,将其插入原数组的尾部,并去除数组中的首个数据,得到新的一维数组;然后对该数组进行算术平均值的运算,并将该值做为本次测量的结果。
当采样的数据量M>N时,任意时刻的移动平均值y-M可用下式表示:

式中yi为任意时候的绝对值。
应用无创呼吸机系统采集到的呼吸流量波形和平滑后的波形,见图8。7~8 s的局部放大波形,见图9。可以看出,平滑后的波形干扰非常少,符合进一步数据处理的要求。

图8 呼吸流量波形和平滑后的波形

图9 流量局部放大波形
3.2 呼吸触发切换算法及波形
目前呼吸机中所用的触发模式主要有压力触发、流量触发、膈肌电触发以及多模式混合等[7-9]。膈肌电触发是近年出现的一种新的触发方式,能够在呼吸动作产生之前检测到膈肌的运动肌电信号,被认为是目前呼吸机中人机对抗最少的一种触发方式,但是由于需要在患者食道内置入膈肌电检测电极,增加了操作的复杂性并给患者增加了额外的痛苦,因此这种触发方式只在医院高档呼吸机中可见[10]。
压力触发和流量触发是常见的两种触发方式,其实现方式有两种,一种是阈值触发,一种是变化量触发。阈值触发由机器预先设定触发阈值,当检测到患者呼吸管路内的压力流量达到设定阈值时开启触发;变化量触发是通过检测患者呼气相与吸气相的流量压力变化率来开启触发。本研究触发切换算法采用流量变化率触发方式,呼吸气体流量在呼吸转换中存在流量突变,通过对流量数据求导,可以获得触发切换的特征信号。流量触发公式如下:
其中ai为任意时刻流量的改变速率,dt为采样时间。
对上述无创呼吸机系统采集到的呼吸流量数据进行触发切换后,可以得到波峰和波谷的值。在实际应用中,可以采用该值作为呼吸机呼气压力(EPAP)和吸气压力(IPAP)的触发时机。呼吸相切换波形,见图10,求导后的波形曲线形成两个尖峰,其位置为对应的呼吸触发切换点。
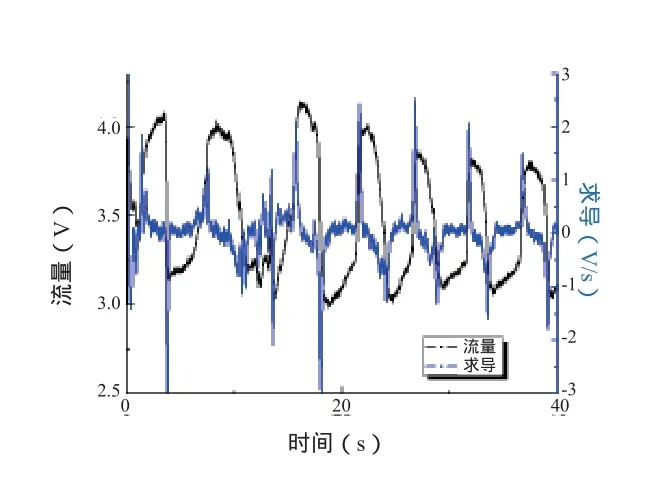
图10 呼吸相切换波形
4 结论
本文论及了一种采用虚拟仪器Labview的呼吸机平台设计,该平台采用NI公司的PCI6230A/D卡,其精密的压力和流量传感器电路,能够高效的实现呼吸机各项功能,并对呼吸相的切换触发算法做了一定的实验和探讨。
[1] 戴捷,王博.呼吸机的发展现状及趋势[J].中国医学装备,2011, 8(2):62-64.
[2] 裴葆青,徐声伟.一种基于Labview的呼吸机控制系统设计[J].中国医疗器械杂志,2011,35(1):50-52.
[3] 孙国君,曹少平.基于Labview的虚拟呼吸机设计和人机系统模拟[J].上海生物医学工程,2007,28(3):147-151.
[4] 戴勇,陈观涛.呼吸机传感器对人机同步影响之探讨[J].中国医疗器械杂志,2009,33(6):4-11.
[5] Silicon Microstructures Inc.SM5651/SM5652 data sheet[EB/ OL].2008-03-21/2015-03-01.http://www.si-micro.com/ da-ta-sheets/SM5611-SM5612.pdf.
[6] Honeywell Sensing and Control.AWM90000 series mass airflow sensors data sheet[EB/OL].2008-05-04/2015-03-01.http:// Sensing.honeywell.com/inde~php?ci_id=50062&la_id=1.
[7] 陆一滨.EVITA4呼吸机误触发等三例故障分析及排除[J].中国医疗设备,2013,28(10):143-144.
[8] 谭志坚,杨东,郑则广.三种呼吸机触发技术的分析和比较[C].杭州:中华临床医学工程及数字医学大会暨中华医学会医学工程学分会学术年会,2008.
[9] 贾守强.一种双水平睡眠呼吸机的人机同步方法[J].硅谷,2013, (14):14-15.
[10] 陆尧胜,冼莹,陈炯锋,等.基于肌电图的呼吸机人机同步新方法的研究[J].生物医学工程学杂志,2009,26(6):1222-1254.
Design of a Labview-Based Noninvasive Ventilator System
YANG Wei-dong1, CHEN Ge2, LV Wei-min3, ZHU Qing1
1.Zhejiang Pharmaceutical College, Ningbo Zhejiang 315100, China; 2.Ningbo First Hospital, Ningbo Zhejiang 315010, China; 3.Zhejiang Research Institute of Medical Equipment, Hangzhou Zhejiang 310009, China
This paper expounded the design of a non-invasive ventilator system on the basis of Labview. The system taken Labview and hardwares such as related sensors as the platform and made use of the control module and display module of the Labview software to establish its interfaces. With utilization of data fl ow diagram, its multiple functions and control algorithm were designed and realized, which made it a unique respiratory detection algorithm for the system. The actual test results of the system demonstrated its high effi ciency and practical signifi cance in realizing each function.
noninvasive ventilators; Labview; pressure fl ow sensors; respiratory detection algorithm
R197.39
A
10.3969/j.issn.1674-1633.2015.05.006
1674-1633(2015)05-0021-03
2015-03-01
2015-03-20
浙江省科技厅公益类项目(2013C33194)。
作者邮箱:543719177@qq.com
