欧洲猫自动化系统ADS—B多传感器跟踪处理浅析
2015-05-30张科晶
张科晶
摘 要:随着我国民用航空业的迅速发展,为加大对安全生产的保障力度,满足我国民用航空发展的需要,适应国内空域情况的复杂性,ADS-B作为新技术在空中交通管制自动化有着广泛的应用空间。
关键词:欧洲猫;ADS-B;跟踪处理
中图分类号:V447 文献标识码:A 文章编号:1006-8937(2015)29-0073-03
1 ADS-B概述
1.1 ADS-B的优势
ADS-B技术有以下几方面的优点。
①数据更新快。
相比雷达监视,ADS-B对监视目标提供更快的报告刷新速率(<1 s),更准确带位置/速度信息的航迹(基于GPS/FMS计算),和将来航迹趋势(基于FMS),有利于较大提升航迹计算精确度,提供给管制员更准确轨迹显。
②信息更丰富。
机载ADS-B发送信息:识别(ICAO24位地址,呼号)、状态向量:位置、高度、完好性和精度质量指示符、速度、航向、飞机状态(紧急状态)、目的地(下一导航点)等。
③目标位置精度高。
航空器是由机载星基导航和定位系统生成的精确定位信息。使用的为GNSS -全球导航卫星系统:装有ADS-B机载设备航空器的识别以及基于ADS-B和/或SSR最小侧向间隔(5NM)。
④成本低廉。
单机站建设成本不到航管二次雷达的十分之一,且作用距离为250 KM(134 NM),目标处理能力为500 s。
1.2 ADS-B地面站与空管自动化设备的连接
在中高流量和有雷达空域提供空管监视,作为雷达的补充或潜在替代手段,融合全部传感器的单一系统航迹,融合全部有关下行数据,跟踪更精确。
2 多传感器追踪处理
2.1 多传感器追踪处理简介
在Thales V5软件升级后,因其接收处理的数据不再局限于雷达数据,MTP退出舞台,转登场多传感器追踪处理功能Multi Sensor Tracking Function(MSTS)。该功能模块接收并处理监视数据,不再仅仅局限于雷达数据(一、二次雷达,S模式SSR数据)同时也能够处理ADS-B报告。处理完毕后以ASTERIX CAT 62格式进行数据分发。MSTS跟踪单架飞行器的航迹信息时,结合每个传感器(雷达,ADS-B,WAM)接收的数据,系统进行融合后发挥各自传感器的最佳优势,并消除其各自缺点。
多传感器跟踪功能相较于曾经MTP使用一个基于交互式多模型(IMM)的卡爾曼滤波变量更新技术,高质量的多传感器跟踪算法在融合算法的准确性、一致性和响应时间有很大的提升。多传感器交互式多模型滤波算法使用三层扩展卡尔曼滤波算法(EKF)。
多传感器交互式多模型滤波算法可以模拟三个过渡模型:
①具有恒定直线速度飞行器运动(EKF1);
②具有恒定转动率飞行器运动(EKF2);
③具有恒定纵向加速度飞行器运动(EKF3)。
这种多传感器的所谓的变量更新的概念基于:持续的空中态势的更新,因为每个传感器提供的所有数据当其收到时就尽快处理(或异步增量更新)。
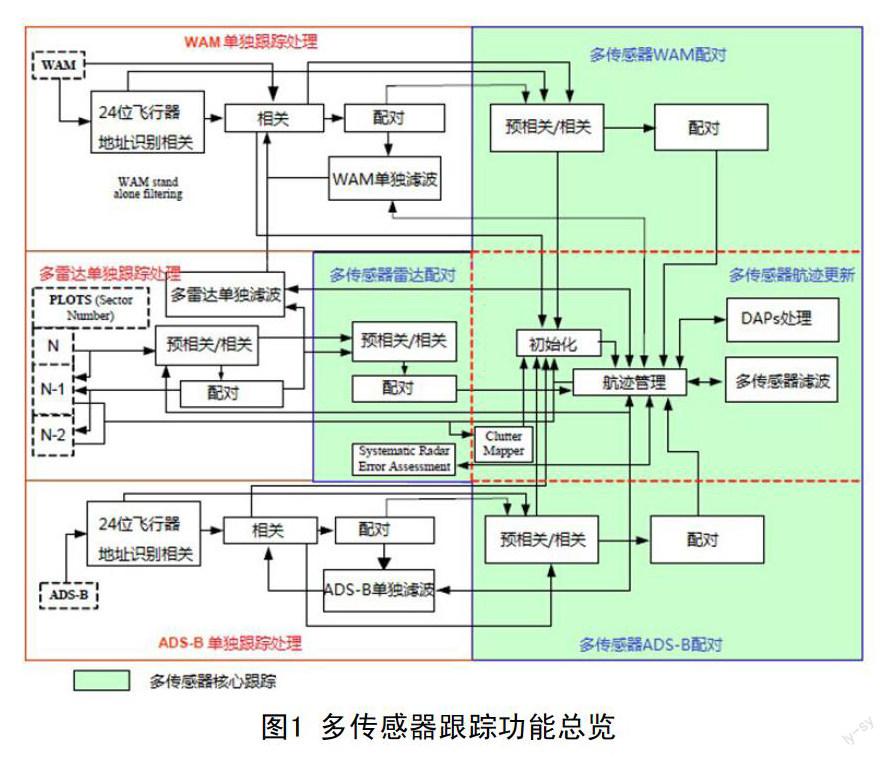
多传感器追踪处理常用处理方式分为:ADS-B/多雷达/WAM单独跟踪处理(ADS-B Stand-Alone Tracking)、多传感器(ADS-B/多雷达/WAM)航迹配对、多传感器航迹更新三部分。多传感器跟踪功能总览,如图1所示。
单独跟踪处理功能:传感器数据的接收触发多传感器跟踪功能。 所谓的传感器数据为:ADS- B报告,WAM报告,雷达点迹和跟踪等。ADS- B数据报告的预处理,以检查传入的ADS - B报告的一致性和完整性为主(错误检测)。系统航迹中的ADS-B信息的处理是基于使用卡尔曼滤波功能独立的ADS- B单独跟踪处理。
多传感器航迹配对(association):雷达、ADS-B及WAM报告将会在其单独跟踪模式下进行配对,再在多传感器交互式多模型状态向量的比对下检查并确定与系统航迹进行配对。
多传感器航迹更新:已配对的传感器报告更新航迹时,使用传感器测量位置的报告,根据不同传感器类型分为:-测量ADS - B的报告的向量组成的纬经度,速度方向矢量或气压高度。
2.2 ADS-B航迹预处理(ADS-B Stand-Alone Tracking
单独跟踪处理)
2.2.1 ADS-B相关功能
对于雷达,ADS-B地面站及WAM系统,都拥有自己的预相关/相关(pre-correlation/correlation),配对(association)功能模块。
将接收到的报告航迹与本地系统航迹(外推点)关联的手段叫做跟踪(Tracking)。跟踪分为三步: Correlation(相关),Association(配对)。
以下主要介绍ADS-B的相关功能:ADS - B单独跟踪处理周期定于接收ADS - B报告的时刻。当收到ADS-B报告,报告将立即单独处理,以避免引入任何处理延迟。
2.2.2 ADS - B的处理报告
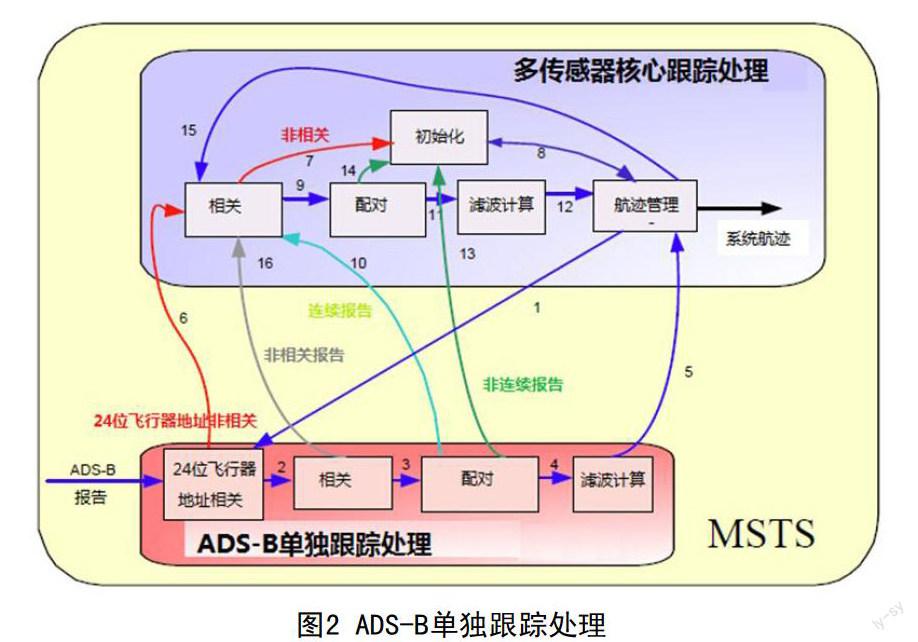
接受ADS - B的报告后,ADS - B的独立跟踪开始处理。在此过程允许ADS – B报告将会与先前收到的ADS - B报告进行一致性检查,ADS-B单独跟踪处理,如图2所示。
①收到的ADS-B报告需与使用有效的ADS-B单机跟踪状态的系统航迹进行配对(association),什么是有效的?使用具有唯一性的24位飞行器地址(aircraft address)。
②当ADS-B报告能够进行配对时,则进行错误检测验证本报告的ADS-B独立跟踪状态(错误检测:以检查传入的ADS - B报告的一致性和完整性)。
③当ADS-B报告不能基于24位飞行器地址的系统航迹配对时,此份ADS-B报告即认为非相关。非相关报告将会发送到多传感器内核跟踪监视尝试基于多传感器状态进行航迹相关。
④当ADS-B报告没有通过错误检测被认为其为非连续报告,并将其发送到多传感器初始化功能模块。
⑤连续性ADS-B报告使用卡尔曼滤波算法更新航迹,并且将结果发送到多傳感器相关功能模块。
2.3 多传感器航迹配对与融合-核心跟踪功能(Multi-
Sensor Kernel Tracking Function)
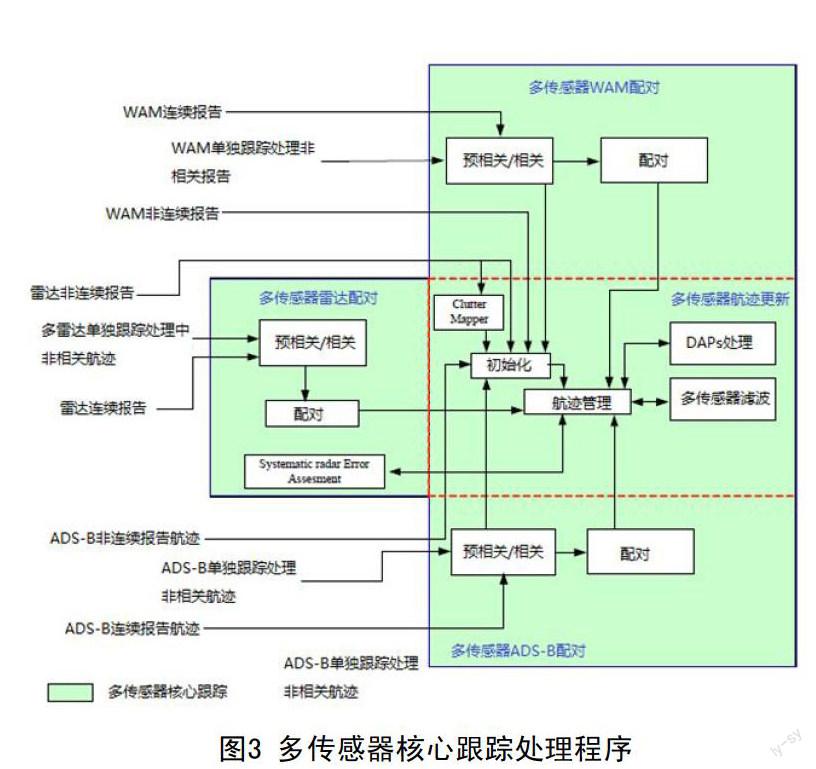
多传感器核心跟踪功能,旨在将系统到同一飞行器的被雷达,ADS-B地面基站信息及WAM系统所监视到的特有航迹融合为系统航迹。多传感器核心跟踪处理程序,如图3所示。
处理流程:预相关(pre-correlation),相关(correlation),配对(association),航迹更新,DAP处理、航迹初始化,航迹管理。2.3.1 多传感器预相关(ADS-B)。
不能与ADS-B报告航迹相关的航迹抛弃。
ADS-B报告航迹为中心点设定一个扇区,扇区的大小取决于:ADS - B的测量标准误差及对飞行器运动性能来说最近一次更新与外推点的最大范围。建立直角坐标系(Dx,Dy,Dz)表示,考虑全球定位系统检测标准偏差,在直角坐标参考表示监视航迹协方差矩阵及最大飞行器加速能力。在不引入任何位置误差的情况下,将从大地测量的ADS-B报告位置坐标通过WGS84坐标转换。
多传感器预相关功能选择的标准非常简单:尽快排除法对应到选定的系统航迹的传感器报告。经过预相关处理后,每个选定的系统航迹能够与一系列的预相关的ADS-B报告航迹相配对,同时每个选定ADS-B报告航迹能够与一系列的预相关的系统航迹相配对。无论是在ADS-B单独跟踪处理中报告航迹相关或非相关的,都将传送到多传感器预相关功能。
2.3.2 多传感器相关功能(Multi-Sensor Correlation Function)。
对于ADS - B报告航迹的单独处理,这个功能是用来拒绝不能与本报告配对的预相关系统航迹。
对每个可能的报告航迹-系统航迹对(或系统航迹-报告航迹对),计算一个评估隶属度(似然度-likelihood),该值评估ADS-B报告航迹对应的系统航迹的概率。这种概率方法基于贝叶斯理论和卡尔曼滤波算法。
评估隶属度的计算,还有一些ADS-B报告航迹的附加属性,即是否相关的决定性因素:SSR一致性,24位飞行器地址一致性,飞行器识别的一致性,独立处理时配对的质量因素,也会根据其他传感器的标准属性(速度、点迹质量,跟踪点迹的航迹号等)综合判断。
在相关阶段的末尾,根据评估隶属度的计算及作为24位飞行器地址一致性,每个ADS-B报告航迹与系统航迹之间的建立相关链接。在下一个相关阶段,可能性最高的值,将会成为相关唯一链接,其他相关链接将会被抛弃。
2.3.3 多传感器的配对功能( Multi-Sensor Association Function)
配对处理解决一对多和多对一相关冲突问题,达到航迹一一配对。
利用最近邻概率配对技术,使用相关隶属度找到最佳航点迹配对。其他相关连接涉及点迹航迹的,将会被抛弃。
ADS-B当一份报告没有相关到任何系统航迹,这份报告将会送到多传感器初始化处理功能模块中。
2.3.4 多传感器的滤波计算功能(Multi-Sensor Filtering Function)
完成配对的点迹用以更新多雷达航迹。系统使用匀速自适应kalman滤波器更新航迹的运动属性。
多传感器交互式多模型滤波算法更新的系统航迹的运动属性。自适应卡尔曼滤波算法通过调整目标运动属性来跟踪机动目标。在航迹更新前计算点迹与航迹外推点迹的统计距离,距离大于统计门限的原因,相应地多假设跟踪方法给出两种多雷达航迹,最后选择一种航迹。
2.3.5 多传感器初始化功能(Multi-Sensor Initiation Function)
当传感器发现不配对的报告航迹时,即传送至初始化功能模块,进行创建并确认可能性监视航迹。
初始化处理包括预相关,相关,配对,航迹更新。初始化航迹需要计算评估隶属度,以判断该航迹的真假。基于Bayesian的判决决定航迹被确认或者抛弃。每个新航迹都分配一个唯一的航迹号。新建的航迹经过初始化后,成为确认航迹,方能更新。
3 ADS-B展望
ADS-B的推广应用在十二五规划中,将在全国范围内建设41套ADS-B地面站,并进一步推广其应用,作为区域雷达监视的补充手段,增加对洋区的航空监视能力扩大对洋区的航空监视覆盖区域。在终端区,能够提供较雷达定位更精密的位置信息。作为本场低高度区域,在雷达覆盖不到区域能够进行高精度定位,可有效的缩短飞行器间隔,管制得到更加全面、准确、完善的空域状况,通过自动化系统更为有效的对整体空域进行指挥调配。
参考文献:
[1] 中国民航局飞行标准司.广播式自动相关监视(ADS-B)在飞行运行 中的应用[R].2008.
[2] EUROCAT-X,System/Segment Specification REV A[S].
