引入传感器对探究加速度与力、质量关系实验的创新
2015-05-30徐平
徐平
探究加速度与力、质量的关系是力学中的重要实验。在传统的探究方法中,平衡摩擦力和满足小车质量与所挂沙及小桶总质量关系的条件是本实验的两大关键点。随着将传感器引入本实验,这两大关键点也悄然发生了变化。为此,对实验原理的理解必须上升到一个新的高度,实验方法也必须作相应的改变。
一、传统探究方法中实验的两大关键点
1.必须“平衡摩擦力”。
如图1所示是探究小车的加速度与力关系的实验装置。小车在水平桌面上受重力、支持力、绳的拉力和摩擦力四个力作用,其中重力和支持力为一对平衡力,小车所受的拉力和摩擦力的合力就是小车所受的合外力。如果平衡掉摩擦力,则小车所受的拉力即为小车的合外力。为此,先不挂沙桶,在长木板不带滑轮的一端垫薄木块并反复移动其位置,改变斜面倾角,直到小车后面的纸带打出的点均匀分布,小车即做匀速运动。这时小车所受重力沿斜面向下的分力与摩擦力刚好抵消。平行于斜面的拉力才可能近似等于小车受到的合外力。
2.确保相应的“质量关系”。
二、引入传感器后对实验的两大创新
1.不需要“平衡摩擦力”。
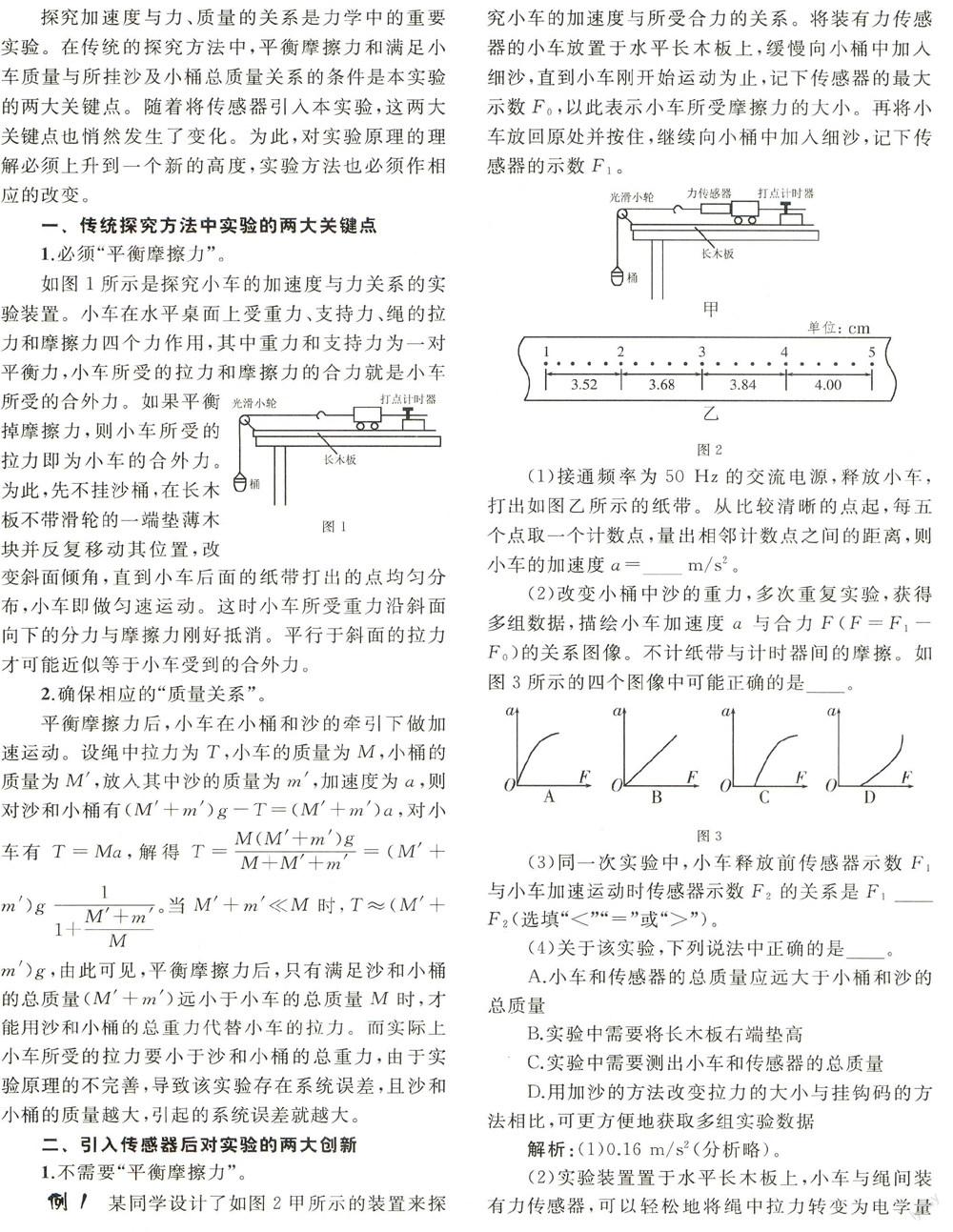
例1 某同学设计了如图2甲所示的装置来探究小车的加速度与所受合力的关系。将装有力传感器的小车放置于水平长木板上,缓慢向小桶中加入细沙,直到小车刚开始运动为止,记下传感器的最大示数F0,以此表示小车所受摩擦力的大小。再将小车放回原处并按住,继续向小桶中加入细沙,记下传感器的示数F1。
(1)接通频率为50Hz的交流电源,释放小车,打出如图乙所示的纸带。从比较清晰的点起,每五个点取一个计数点,量出相邻计数点之间的距离,则小车的加速度“a=____m/S2。
(2)改变小桶中沙的重力,多次重复实验,获得多组数据,描绘小车加速度a与合力F(F=F1-F0)的关系图像。不计纸带与计时器间的摩擦。如图3所示的四个图像中可能正确的是
。
(3)同一次实验中,小车释放前传感器示数F1与小车加速运动时传感器示数F2的关系是F1______F2(选填“<”“=”或“>”)。
(4)关于该实验,下列说法中正确的是____。
A.小车和传感器的总质量应远大于小桶和沙的总质量
B.实验中需要将长木板右端垫高
C.实验中需要测出小车和传感器的总质量
D.用加沙的方法改变拉力的大小与挂钩码的方法相比,可更方便地获取多组实验数据
解析:(1)0.16m/S2(分析略)。
(2)实验装置置于水平长木板上,小车与绳间装有力传感器,可以轻松地将绳中拉力转变为电学量记录下来。缓慢向小桶中加入细沙,直到小车刚开始运动为止,记下的最大示数F0为小车与木板间的最大静摩擦力(近似看成滑动摩擦力);将小车放回原处并按住,继续向小桶中加入细沙,记下传感器的示数F1是小乍静止时绳中的拉力,它等于小桶和沙的总重力。描绘的小车加速度a与合力F(F=F1-F0)的火系图像相当于无传感器下平衡摩擦力后描绘的小车加速度与作用力(沙和小桶的总重力)的图像,C、D均错误。此时将沙和小桶的总重力视为拉力的条件可能满足也可能没有满足,故A、B都有可能Ⅱ:确。答案为AB。
(3)小车做加速运动时,绳的拉力F2小于沙和小桶的总重力F1,即F1>F2。
(4)本实验中将小车静止时绳中拉力视为小车运动时沙和小桶的总重力,需要满足小桶和沙的总质量远小于小车和传感器的总质量的条件,A正确。用力传感器可以直接测出摩擦力,不需要平衡摩擦力.B错误。本实验中探究小车的加速度与合力的关系,只要保持小车和传感器的总质量不变,不需要测出它们的具体数值,C错误。用加沙的方法改变拉力的大小,每次沙的质量可增加得很少,而挂钩码每次质量增加得多,故前者可更方便地获取多组实验数据,D正确。答案为AD。
点评:探究加速度与力、质量关系的传统实验中,近似地用小桶和沙的总重力来代替绳对小车的拉力,必须在没有摩擦或平衡了摩擦力,同时满足沙和小桶的总质量远小于小车的质量的情况下成立。引入力传感器后,既能减小读数误差使实验结果准确又能方便地测出摩擦力,在作图时,用测出的小车拉力减去摩擦力作为合力,可以省去平衡摩擦力这一步骤,提高实验的精度。美中不足的是该同学在测出摩擦力后,记下的传感器示数F1是小车没有做加速运动时的拉力,与小车做加速运动时传感器的示数还有差别,这样的实验设计仍有改进的空间。
2.不需要满足相应的“质量关系”。
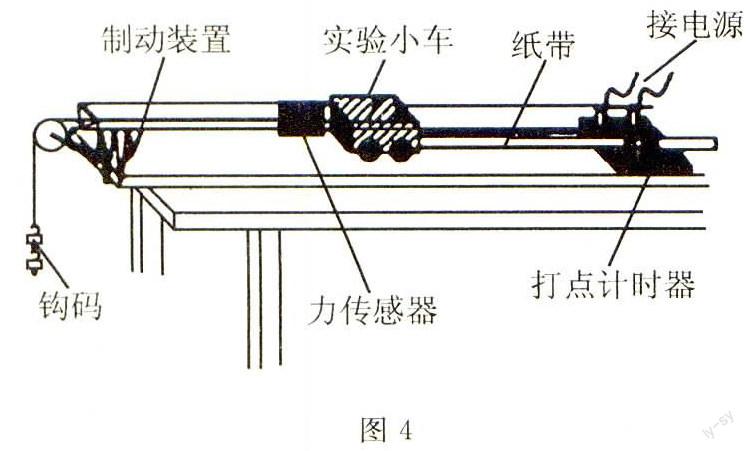
侧2某课外实验小组利用如图4所示的实验装置研究“加速度与合外力的关系”。
(1)在实验中,为了平衡小车运动中受到的摩擦力,下列叙述中正确的是____。
A.不挂钩码,逐步调节木板的倾斜程度,使静止的小车开始运动
B.挂上钩码,逐步调节木板的倾斜程度,使小车在木板上保持静止
C.不挂钩码,调节木板到一定的倾斜程度,轻轻沿板面向下推动小车,使夹在小车后面的纸带上所打的点间隔均匀
D.挂上钩码,调节木板到一定的倾斜程度,轻轻沿板面向下推动小车,使夹在小车后面的纸带L所打的点间隔均匀
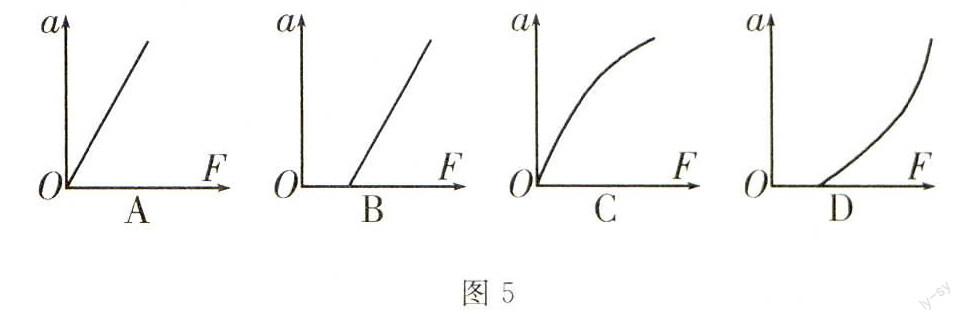
(2)平衡摩擦力后,利用钩码和小车之间连接的力传感器测出细线上的拉力F,改变钩码的个数,利用纸带算出对应的加速度,进而确定加速度“与细线上拉力F的关系,则图5中能正确表示该同学实验结果的是_____。
解析:(1)平衡小车在运动中受到的摩擦力时,不挂钩码,调节木板到一定的倾斜程度,轻轻沿板面向下推动小车,使夹在小车后面的纸带上所打的点间隔均匀,且一经平衡不需每次都添加钩码进行再次平衡。答案为C。
(2)平衡摩擦力后,用力传感器测出的细线上的拉力F是小车做加速运动时所受的拉力,它也是小车做加速运动时所受的合外力。小车的加速度a与所受合外力F成正比,且a-F图像是一条过原点的直线。答案为A。
点评:平衡摩擦力后,用力传感器直接测出细线上的拉力F为小车真实所受的合外力,小车质量与所挂钩码质量关系间的限制条件也就不复存在了,传感器的引入使得因不满足相应的“质量关系”而导致的系统误差消失。值得指出的是,若按传统方法,将所挂钩码重力mg作为细线的拉力,由于小车做加速运动时所受的拉力小于所挂钩码的重力mg,且随着所加钩码重力的增大,引起的误差也变大,作出的a-F图像便有可能是图5中的C选项了。另外,例2(2)中利用钩码和小车之间连接的传感器测量小车做加速运动时细线上的拉力的设计,比例1中设计的测量小车静止时细线上的拉力更科学、更准确。