基于机器视觉虚拟激光键盘的设计
2015-05-30李淑玉吕争
李淑玉 吕争
摘 要: 结合先进的激光技术和图像处理技术,利用三边检测原理判断手动按键,开发出一套基于机器视觉的虚拟机关键盘,相较于其他模型,该键盘具有灵敏度高、成像效果好、识别精确等优点。同时,虚拟键盘具有概念新颖、成本低廉、噪声低、严格防水等优点,适合在高强度作业和水汽较重的工控环境下使用。
关键词: 计算机视觉方式; 图像识别; 视觉处理算法; 三角测距原理; LLP技术
中图分类号: TP 39 文献标志码: A 文章编号: 1671-2153(2015)06-0079-04
1 问题的提出
随着信息化技术的发展,轻便、舒适、灵活已经成为键盘设计的最优目标,而传统的键盘功能单一且携带麻烦。在这样的背景下,本文拟设计了一种高性能的便携式虚拟激光键盘[1]。它将运用移动电源、功放、超声波技术实现额外功能,同时具有无菌无噪声等功能。本研究将放弃传统的供电方式,采用当前先进的移动电源技术供电,增强了键盘的可移动性和续航能力。设计的便携式虚拟激光键盘将为人们外出旅游、办公和从事无菌无噪声科研等带来了极大的方便。另外,由于在国内该技术上处于空缺状态,所以本项目具有很好的市场前景。
2 系统方案
2.1 系统框图
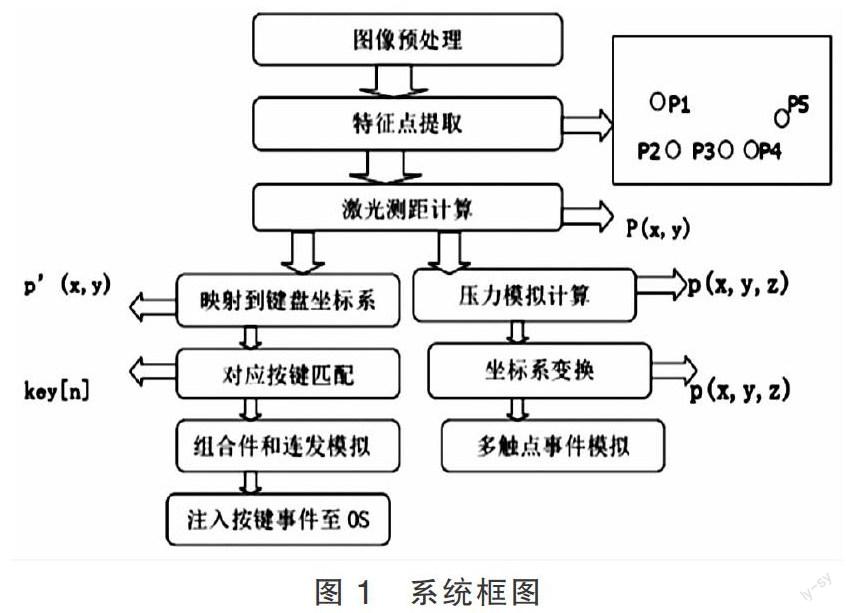
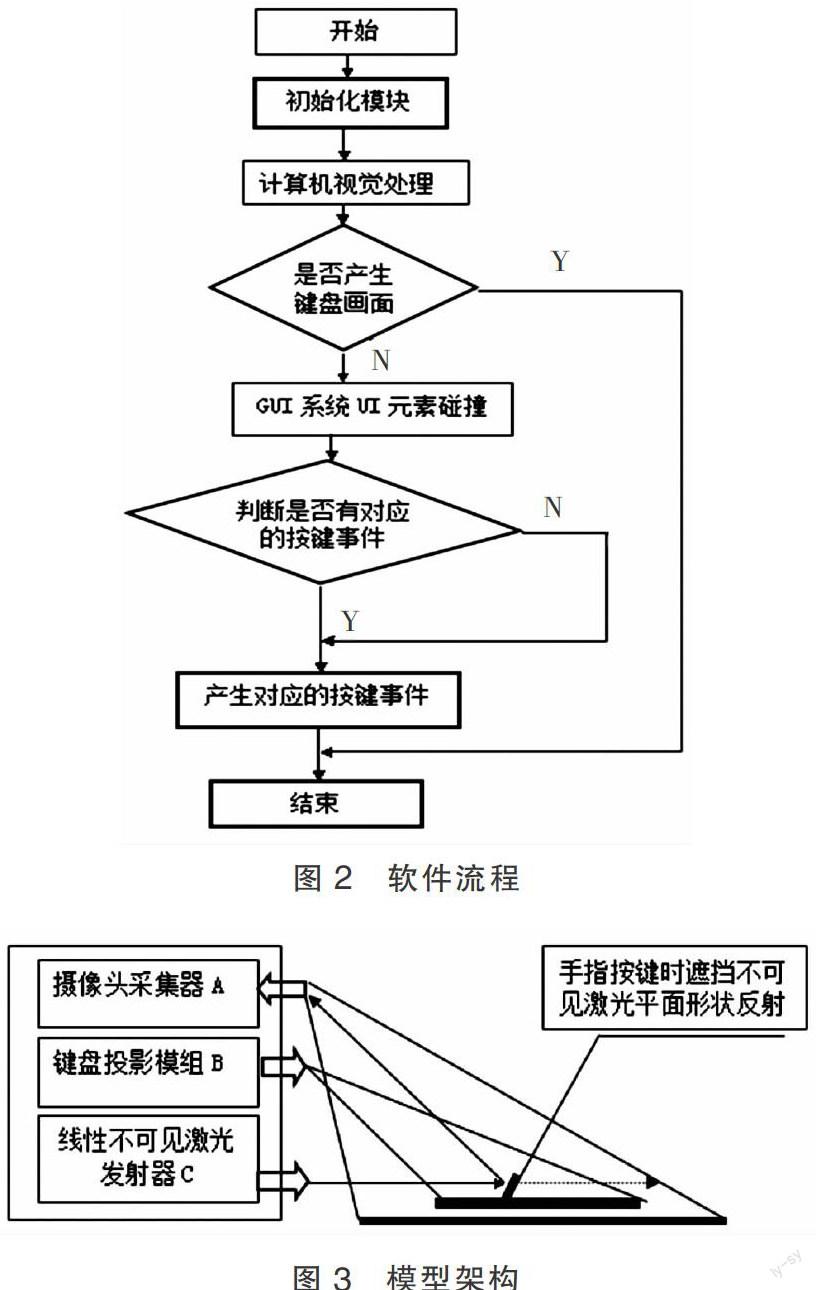
本研究基于视觉处理算法,全息投影技术,借用三角测距原理和LLP技术,采用了传感器技术、无线通信技术、控制技术、数据库技术、GUI系统UI元素碰撞技术、红外技术、激光扫描技术、摄像头处理技术、空间三维坐标处理技术、光学原理、滤波原理及镜面反射技术,以MATLAB仿真为手段和采用OpenCV数据处理来加速视觉运算代码的开发[2],用PC处理来设计的低成本、高性能的虚拟激光键盘,如图1所示。软件流程如图2所示。
2.2 激光虚拟键盘模型结构
本文设计的激光虚拟键盘主要由线性不可见激光发射器、摄像头采集器、键盘投影模组三部分组成,模型架构如图3所示。
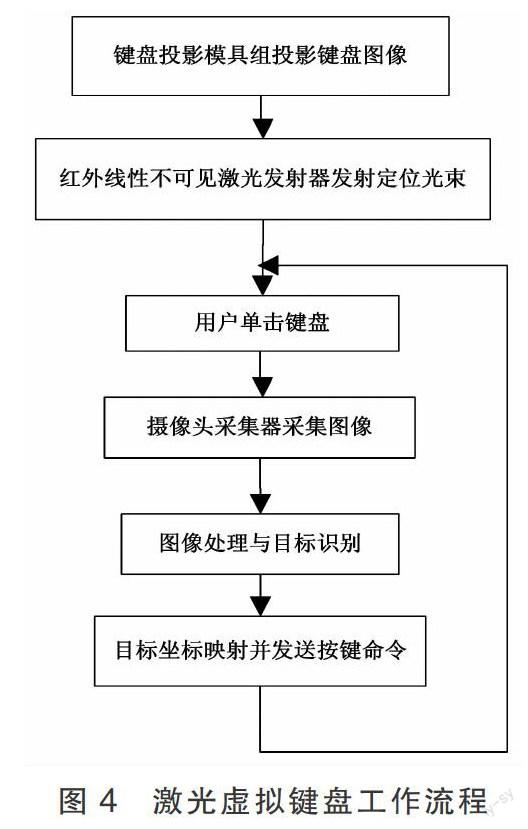
本研究的工作流程,首先键盘投影磨具投影出虚拟键盘模型,通过红外不可见光发送定位光束,当用户敲击键盘瞬间,摄像头采集图像参数,并对图像和目标进行识别[4]。通过识别转换成坐标,系统识别坐标后调用坐标映射函数并发送按键命令[5],系统具体工作流程如图4所示。
3 功能与指标
(1) 摄像头模块功能。采用USB接口,视角120度以上的CMOS摄像头,可用于互动投影,多点触摸。除了镜头有要求外,其他无特殊要求。本研究采用150°广角摄像头,具有极强的视角。
(2) 投射键盘画面的激光器模块功能。激光器模块键盘大小要求要120度,650 nm激光组件。在实际使用过程中,激光组建应当使得键盘平整,按键的大小均匀,以减少系统的误判。
(3) 一字线激光模块功能。本研究采用的一字线激光器是红外波段,波长为808 nm,主要是为了滤掉可见光的干扰[6]。为减低其功率,提高键盘的可靠性,激光模块采用的工作功率为50 W。本文采用直径12 mm,长度40 mm,线发射角度为120度、60度、35度可选,激光类型为线装。
(4) 红外带通滤光片。采用800~1100 nm高透,与红外激光器配合测距可避免可见光的干扰,可使可见光400~760 nm截止。滤波片厚度2mm,配合广角镜头合理使用,避免出现曝光和弱光现象,否则会使键盘乱踩点或者检测不到点[7]。
(5) 功放模块功能。系统集成mp3模块。面板尺寸为宽80 mm,高40 mm,内深50 mm,中心孔距为60 mm。其中功放为BTL输出,还有FM功能,但需接一根天线,并切换MODE模式,其中AUX显示当前工作状态,FM显示当前收听电台。
(6) 移动电源模块功能。采用带有双USB的5 V升压板。5 V恒压电源可作为充电输入电源,电路板内置锂电池IC保护,具有过压、过流、欠压保护等。还自带手电功能,连按两下开关键即可启动,再连按两下开关键即可关闭。移动电源进入工作状态时,蓝色背光源被点亮,15 s后熄灭,按轻触开关(on/off)一次,蓝色背光源再次被点亮15 s,方便查看LCD显示屏。
4 实施原理及过程
4.1 键盘功能的实现
4.1.1 键盘输入事件的识别
虚拟键盘是基于三角测距原理,通过投射激光对目标物体进行检测。测距过程中,通过一束激光照射目标物体,反射光被摄像头捕捉到,利用三角测距原理[8],求出目标物体中被线激光照亮部分的坐标信息。在线性激光测距中,通过三角关系,容易求出被激光照亮部分,相对于激光发射口为原点、位于线激光组成平面内的坐标P(x,y)。在本系统中,激光组成的平面可以等效于与桌面平行,故可以认为坐标点P(x,y)是位于桌面平面的,如图5所示。
4.1.2 按键事件的判断与产生
在虚拟键盘中,所有UI元素均对应屏幕的坐标值。系统周期性判断当前鼠标指针位置是否产生光斑。相较于UI系统,在数据库中需要建立投射键盘图案中每个按键的坐标信息,然后查找指尖按下的坐标,从而判断出坐标信息,其示意图如图6所示。
上述键盘功能实现过程需要涉及到两个步骤:
(1) 通过三遍测距算出指尖按下的坐标,记为P(x,y)。
(2) 将映射点P(x,y)与数据库中的坐标值进行对比,求出P(x,y)对应的按键值。
4.2 虚拟键盘视觉方式与算法的具体实现
由于本研究的视觉处理部分都在PC上进行,因此使用了OpenCV库来加速视觉运算代码的开发。
4.2.1 摄像采集器镜头扭曲矫正
在本系统中,实际使用为广角摄像头,与普通摄像头相比,广角摄像头采集图像具有中心偏大,两侧偏小的特征,如图7所示。
为了使得图像坐标信息具有线性变化的特点,需要对采集的图像进行处理,通常采用的高斯模型降噪[9],在程序中调用OpenCV库函数对实际图像进一步优化,以达到摄像头扭曲矫正的效果。
4.2.2 图像兴趣点提取
通过调用OpenCV库函数中的cvFindCountours,对摄像头中的光斑进行提取,通过提取光斑获取图像的兴趣点,由于环境中光线的变化,因此存在高斯噪点,可以通过增加权重的方式来减少误判,提高系统识别图像兴趣点的精度。
4.2.3 手指坐标计算和校正
通过手指光斑的相对位置,调用三边测距算法,求得手指的具体相对位置P(x,y)。通过三次测距得知P点,通过P点的旋转90°知道P的逆矩阵。同时通过上述介绍的公式算出逆矩阵与原来矩阵的误差精度,再通过平滑取值抹除误差较大的点,得到手指的正确坐标,即是手指在桌面投影的实际坐标,如图8所示。
5 特色与创新点
(1) 本研究在设计的原理上具有创新性:采用基于计算机视觉方式识别、判断和产生键盘事件。
(2) 相对传统键盘,该键盘无菌,方便用于无菌场合,且噪音少,可广泛用于公共场合,该键盘工作稳定、便于调试,可方便使用在工作环境条件差(例如化工生产)的场合。
(3) 本研究采用当前先进的移动电源技术供电,增强了键盘的可移动性和续航能力。
(4) 线激光测距的采用,提高了按键事件的判断和效率。
(5) 集合了视觉算法、三角测距、LLP技术多点触摸定位、功放、升压、超声波等技术,具有广泛的应用价值。
(6) 该键盘可以测出手指对桌面的“压力”,在绘画板产生不同粗细的图像。
(7) 采用的线激光测距,有利于检测指尖的位置和判断是否产生键盘事件。
6 结 论
基于机器视觉的虚拟激光键盘,结合机器视觉处理的OpenCV库,以及三点定位算法,实现了虚拟键盘的模型建造。在研究虚拟键盘过程中,预先通过MATLAB仿真,对设计过程中遇到的问题进行了提前模拟,有效的指导了模型的建造过程,本系统具有成本低廉,识别精确度高等优点,其模型具有推广价值。
参考文献:
[1] 陈士凯.自制低成本3D激光扫描测距仪(3D激光雷达),第一部分[J/OL]. (2012-02-06)[2015-07-20]. http://www.hobbypress.cn/bencandy.php?fid-182-id-7309-page-1.htm.
[2] 布拉德斯基. 学习opencv[M]. 北京:清华大学出版社,2009.
[3] 谭浩强. C++程序设计[M]. 北京:清华大学出版社,2010.
[4] 张国云,郭龙源,吴健辉. 计算机视觉与图像识别[M]. 北京:科学出版社,2012.
[5] 张岳,郝丽,柳华,等. 激光显示的原理与实现 [J]. 光学精密工程,2006,14(3);402-405.
[6] 刘庆祥,蒋天发. 彩色与灰度图像间转换算法的研究[J]. 武汉理工大学学报(交通科学与工程版),2003,27(3):344-346.
[7] 王红梅,李言俊,张科.基于极值检测的图像滤波算法[J]. 激光与红外,2007,37(10):1117-1119.
[8] 梁华为. 直接从双峰直方图确定二值化阈值[J]. 模式识别与人工智能,2002,15(2):253-256.
[9] 王慧峰,战桂礼,罗晓明. 基于数学形态学的边缘检测算法研究及应用[J]. 计算机工程与应用,2009,45(9):223-226.
Abstract: This work combines advanced laser technology and image processing technology, the use of manual key trilateral detection principle is determined to develop a machine vision-based virtual organ keyboard, compared to other models, the keyboard has a high sensitivity, good imaging results. , recognition accuracy and so on. at the same time, the concept of virtual keyboard with a new, low cost, low noise, strict waterproof and suitable for use in high-intensity operations and moisture heavy industrial environments.
Key words: computer vision methods; image recognition; visual processing algorithms; triangulation principle; LLP technology
(责任编辑:徐兴华)