动量轮诱导的卫星地面微振动特性研究以及在轨仿真分析
2015-05-28杨新峰白照广杨栋李艳辉
杨新峰,白照广,杨栋,李艳辉
(航天东方红卫星有限公司,北京 100094)
星上活动部件在轨工作时会诱发卫星低量级的扰振,这种低量级的振动有可能影响卫星有效载荷如遥感相机的成像质量[1—2]。引起星上微振动的干扰源有很多种,如动量轮、陀螺、数传天线、机械制冷机、冷热交变等[3—9],对成像质量产生较大影响的干扰源主要为动量轮。文献[4]报导地面测量的某卫星动量轮微振动量级约为9.3×10-2g,文献[8]报导SPOT-4卫星在轨动量轮微振动量级约为1×10-2g,文献[9]报导某遥感卫星在轨动量轮微振动量级约为23.5×10-2g,而辐射计微振动量级约为57×10-2g。当前在卫星微振动的研究中开展了不少地面微振动试验,获得了不同转动部件产生的星上地面微振动加速度量级,但转动部件引起的星上微振动传递特性规律还有很多方面没有探索清楚,如转动部件与卫星结构的耦合、试验边界的影响、同时与分别转动的差异、非稳定转动特性以及传递路径的差异等。在卫星微振动仿真分析方面,由于卫星地面试验很难真实模拟卫星在轨状态(如边界条件、太阳翼的展开状态等),因此,整星地面微振动测量数据还较少用于卫星微振动仿真分析的模型修正或验证,大多数微振动在轨仿真分析使用的是转动组件的数学理论模型[1,4]或转动组件的单独试验测试数据[10—13],卫星整星在轨状态的微振动仿真分析与地面试验还存在一定的脱节。
针对上述问题,文中对某型号卫星开展星上多个动量轮在不同转速下的微振动特性研究,总结分析动量轮与卫星结构的耦合影响、卫星边界的作用以及微振动传递特性等问题,并基于卫星地面微振动试验数据开展卫星微振动仿真分析。
1 地面微振动试验
1.1 试验设置
某初样卫星在不同位置安装了4个动量轮,如图1所示。动量轮分别安装在卫星底板、平台舱隔板、卫星中板和载荷舱隔板上,从底部向上依次叫做动量轮A、动量轮B、动量轮C和动量轮D。卫星的顶部安装有相机系统,在该次卫星微振动试验中,相机为结构模拟件。在各动量轮以及相机附近安装微振加速度测点。其中动量轮A、动量轮B、动量轮C和动量轮D处的测点分别为AC01—AC04,相机次镜、相机根部和相机支架上的测点分别为AC05—AC07。

图1 微振动试验卫星Fig.1 A satellite for micro-vibration testing
在微振动试验中,卫星不安装太阳翼,按固支和悬吊两种状态进行动量轮转动的微振动环境测试。卫星固支状态即是把卫星用螺钉连接在支架车上,也叫支架车状态。支架车由丝杠旋紧,支撑于地面上。严格来说,这种固定形式使卫星处于非完全固定边界,其基本频率低于卫星完全固定的频率。悬吊状态则是用吊具吊起卫星,吊具上端挂在实验室内的吊车上。
1.2 试验测试工况
卫星固支和悬吊两种状态下,按表1所示的动量轮运转工况进行微振动环境测试。在微振动环境测试之前,应进行背景噪声和卫星结构频率特性的测试。试验期间需关闭实验室内空调、照明等设备,以免引起未知微振动噪声,同时卫星附近避免人员走动,以减少噪声及微幅振动等扰动环境。
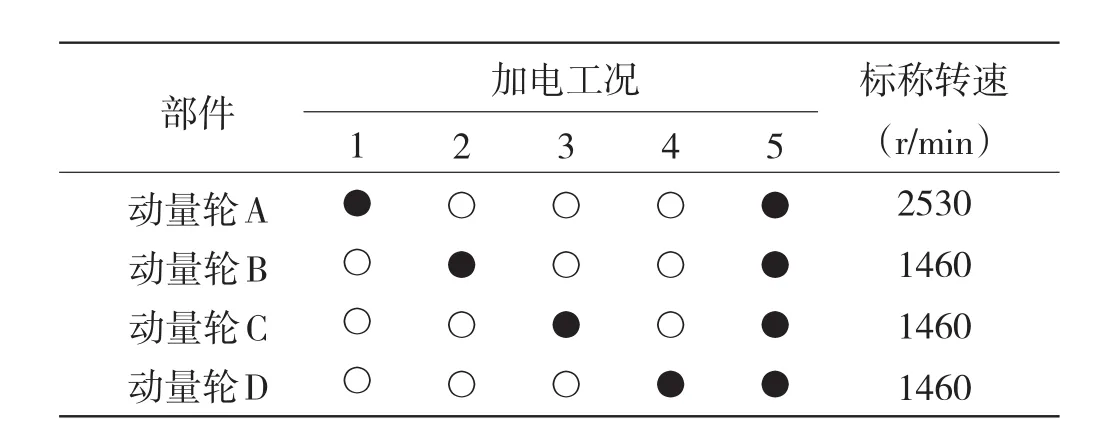
表1 动量轮加电运转工况Table 1 Operation condition for momentum wheels
1.3 试验数据
卫星固支状态下,不同动量轮在其标称转速下的微振动量级见表2。可以看出,动量轮C转动产生的微振动最大,其本身最大值约为103×10-2g(时域),标准差约为29.8×10-2g。轮D转动产生的微振动最小,其本身最大值约为15.5×10-2g(时域),标准差约为4×10-2g。
轮C转动激起相机处的微振动最大,相机次镜处微振动时域最大值为13.9×10-2g,标准差约为4.9×10-2g。激起相机处的微振动量级最小的不是本身微振动扰动最小的动量轮D,而是动量轮B。动量轮B激起的相机次镜处微振动时域最大值为2.6×10-2g,标准差约为0.67×10-2g。这是由微振动传递特性的差异引起的。
卫星悬吊状态下,不同动量轮在其标称转速下的微振动量级见表3。可以看到,卫星在悬吊状态与固支状态具有基本相同的特性。

表2 固支状态下不同动量轮转动产生的微振动环境Table 2 Micro-vibration data induced by rotating momentum wheels under fixed boundary condition

表3 悬吊状态不同动量轮转动状态产生微振动环境Table 3 Micro-vibration data induced by rotating momentum wheels under suspended boundary condition
2 微振动特性分析
2.1 轮子与卫星结构的耦合
动量轮A以转速2530 r/min转动,对应的转动频率为42.2 Hz,由于轮子的不平衡,其会在42.2 Hz处产生干扰力。此外,动量轮本身存在的径向平移模态、轴向平移模态以及摇摆模态[14—15],还会激起其他的振动频率。
单独动量轮A固定于地面以转速2530 r/min转动时,实测得到的产生较大干扰力和力矩的频率为42.2,245,225,303 Hz等。其中最大的干扰力为303 Hz,量级约为:Fx=469 mN,Fy=84 mN,Fz=3 N,Tx=0.000 083Nm,Ty=0.023 Nm,Tz=0.000 45 Nm。由此可见,42.2 Hz只是动量轮的转速频率,此频率处因轮子的动不平衡产生干扰力,而其他干扰响应频率可以归为动量轮的本身模态频率。
从整星上动量轮处的响应曲线(如图2所示)来看,响应的频率包含42.2 Hz,此频率对应于轮子转动频率,是由轮子的动不平衡引起。星上其他的微振动响应频率有22,77,84 Hz,在100 Hz之上响应频率更多,其中最大的为205 Hz。由此可见,除了42 Hz,动量单独测试与动量轮安装星上的响应频率有较大变化。由于卫星结构与动量轮的耦合影响,星上动量轮处不仅响应频率点增加了,而且响应频率前移了。

图2 动量轮A的微振动频域曲线Fig.2 Micro-vibration curve of frequency domain for the wheel A
2.2 卫星安装边界的影响
在卫星固支(支架车上)和悬吊状态下分别进行了背景噪声的测试,固支状态下的时域最大值、标差最大值、总均方根最大值分别为0.9×10-2g,0.4×10-2g,3.5×10-2g;悬吊状态下分别为0.7×10-2g,0.176×10-2g,0.1×10-2g。可以看出,悬吊状态背景噪声较小,固支状态的背景噪声稍大。这主要是由于地面一些干扰通过固支边界传递至星上,而悬吊系统距离地面较远,中间经过吊车和卫星吊具的传递,对地面微振干扰有一定衰减作用。可以认为,固支状态由地面直接传递至星上的背景干扰大于悬吊状态,因此悬吊状态有利于微振动环境测量。
动量轮A转动时,固支和悬吊状态下动量轮处微振动谱曲线对比如图3所示,可以看出,二者的主要区别在低频区域。4.7,8.6 Hz是悬吊状态系统所具有的共振频率,14.8,21 Hz为固支状态系统所具有的共振频率,这两者的不同是由卫星边界状态不同造成的。在42 Hz及其以后曲线比较一致。

图3 固支与悬吊动量轮A的扰振曲线Fig.3 Micro-vibration curve for the wheel A under the fixed and suspended conditions
卫星固支(支架车上)和悬吊状态下,其微振动测量数据见表4。可以看出,量级差别不大,从总量级来看,两种边界状态对星上微振动时域上的量级影响不大。差异主要为两种边界在低频的响应。

表4 固支和悬吊状态下动量轮A转动时微振动加速度Table 4 Micro-vibration acceleration data for the wheel A under the fixed and suspended conditions
2.3 微振传递特性
根据表2数据,卫星固支状态下,动量轮单独转动时,动量轮C本身微振动干扰最大,动量轮D最小,两个动量轮的微振动量级相差大约7倍。从每个动量轮到相机次镜(AC05)的传递来看(按标差值计算),都具有衰减特性,动量轮D的传递比较大,约为0.475,动量轮B的传递比较小,约为0.03。因此,应把具有较大干扰的动量轮放置在传递比较小的路径上,即把具有较大干扰的动量轮放置在动量轮B安装处,把干扰较小的动量轮放置在动量轮D安装处。动量轮D位于载荷舱隔板上,与安装相机的舱板只隔一个界面,与相机距离也较短,因此,其微振传递比较大。从传递距离分析,动量轮A距离相机安装面最远,但它的微振传递比不是最小的,说明距离和界面相比,传递界面的阻尼对微振传递比影响较大,其次为距离的影响。
卫星悬吊状态下,动量轮单独转动时,动量轮本身的微振动干扰与固支状态下的特性基本一致。从每个动量轮到相机次镜(AC05)的传递来看(按标差值计算),动量轮D的传递比较大,动量轮B的传递比较小,这也与固支状态下的特性基本一致。
2.4 分别转动与同时转动的差异
4个动量轮同时转动与动量轮单独转动的微振动对比见表5。可以看到,4个动量轮同时转动产生的微振动干扰相比单个动量轮转动要大,对相机处的微振动量级主要由最大扰动的动量轮C贡献。四轮同时转动时,相机次镜微振动与单独动量轮C转动引起的相机上微振动基本相当。从表5几个关键测点的标差值比较,4轮同时转动相当于单个动量轮C的1~1.3倍,单个动量轮D的2.5~3.7倍。

表5 卫星固支状态不同动量轮转动状态产生微振动环境Table 5 Micro-vibration data for momentum wheels with different work status under the fixed condition
2.5 微振动抑制策略
根据上述初样卫星微振动试验分析得到的星上微振动传递特性,对正样卫星4个动量轮的安装位置进行了调换,把具有较大干扰的正样动量轮放置在传递较小的路径上。对4个正样动量轮分别进行干扰力测试,得到其干扰力大小,见表6。

表6 正样卫星与初样卫星微振动环境测试结果对比Table 6 Comparison of micro-vibration test results between prototype satellite and flight satellite
从表6可以看到,初样时四轮同时转动导致相机次镜处的微振动量级为4.9×10-2g,正样时为1.59×10-2g,微振动量级下降67.6%。初样与正样动量轮的本身微振动最大扰振相差不大,但相机次镜的微振动有较大下降。
3 微振动在轨状态仿真分析
3.1 微振动仿真分析思路
进行成像质量影响分析所需要的直接参数是微振动的角位移/角速度,测量得到的微振加速度还不易于分析对相机成像质量的影响,因此,需要利用有限元模型从测量的微振动加速度数据分析计算对相机成像有直接影响的微振角位移/角速度大小。仿真分析需要试验数据的修正支持,由于地面微振动试验状态一般与在轨状态有较大差异,因此,地面微振动试验数据还很难直接用于在轨状态微振动仿真分析的验证。为此,提出一种基于地面试验数据(支架车状态)的卫星微振动仿真分析思路,具体步骤为:建立卫星结构动力学模型,此模型由卫星常规振动试验数据修正;修改卫星模型为支架车状态,以便利用地面支架车微振动测试数据进行验证,主要验证从干扰源到相机微振动传递特性的正确性;修改支架车状态卫星模型为自由状态;添加太阳翼状态模型,开展在轨状态微振动仿真分析。
3.2 卫星微振动建模分析
初始卫星结构动力学模型已建立,并由卫星振动试验数据修正验证。根据此次微振动试验中的传递特性,卫星在支架车上的主要频率为14.91,21.59 Hz。据此,修正卫星模型为支架车状态,利用bush单元进行修改,修正后卫星最低频率与支架车上的卫星频率相匹配。根据支架车上的模型计算后得到初样卫星C动量轮激励下的微振动响应,卫星上主要关心点的响应与试验测点的对比见表7。
从表7可以看出,在相机安装处以及其他卫星结构上的计算结果和试验结果比较接近,在相机次镜组件三杆前端计算结果和试验测试结果有较大差异。这主要由于微振动试验所用相机为模拟件,三杆材料为铝合金材料,而实际产品的材料为殷钢材料,刚度不一致。因此,在计算中相机模型采用真实材料的模型。

表7 固支卫星微振动计算结果与试验结果对比Table 7 Comparison between micro-vibration simulation results and test results
支架车状态的卫星模型经过试验数据修正验证后,卫星边界再修改为在轨自由边界状态,并验证了前6阶模态接近于0,为自由无约束状态。然后卫星添加展开状态的太阳翼模型,根据前期初步分析,太阳翼转动对本星微振动影响不大,因此,模型中太阳翼根部与星体固体连接。太阳翼展开状态下整星在轨微振动响应计算结果见表8。

表8 太阳翼展开状态下整星在轨微振动响应Table 8 Micro-vibration of satellite with deployed solar
3.3 相机转角分析
根据相机次镜到主镜的距离和计算得到的次镜与主镜的位移,利用表8中有限元模型计算数据可以计算得到初样卫星相机从次镜到主镜的转角(总均方根值)。同样可以计算星上另一个小相机的转角。从位移数据看,相机内部的相对位移主要发生在x方向,因此,转角为在xoz平面内绕y轴的转角。
1)相机的转角:相机次镜到主镜的距离约L1为416 000 μm,计算得从次镜到主镜的转角为6.7″。
2)小相机的转角:小相机从第一镜头头部到相机后端的距离约L2为514 000 μm,计算得第一镜头头部到相机后端的转角为0.36″。
可以看出,在太阳翼展开状态下,相机在轨x动量轮微振动引起的转角较大,而小相机在几种状态下的微振动转角都较小。
3.4 对成像的影响分析
3.3 节得到了相机的总均方根值转角,此总均方根值转角按分段频率计算可得到相机不同频段的角振动数据,见表9。可以看出,支架车上和自由状态的较大转角振幅发生在2~10 Hz频段,其次为10~50 Hz,而在50 Hz以上相机的微振动转角较小。对于在轨太阳翼展开状态,最大的转角为6.5″,发生在1~2 Hz之间,峰值为1.7 Hz。
在轨太阳翼展开状态,相机较大的角位移是由太阳翼耦合引起的。对于文中分析的工况,太阳翼耦合振动1.7 Hz是主要贡献因素,初样状态的微振动激励在低频大约有0.1个像素的振动影响。

表9 相机分频段角振动分析结果Table 9 Computation angular results with different frequency bands for camera
4 结论
开展了不同卫星边界的星上动量轮转动的微振动试验研究和仿真分析,通过对试验数据和计算结果的分析,得出以下结论。
1)轮子单独测试与星上测试得到的微振动谱有较大差异,而相同的频谱段仅为转动频率,这是由于轮子与卫星结构的耦合造成的。
2)卫星不同边界的试验数据表明,卫星悬吊状态的背景噪声小于固支状态。动量轮转动时,固支和悬吊状态下星上微振动环境谱在转动频率以上部分差别不大,在转动频率以下的差别主要是由于固支与悬吊的基本频率不同。
3)每个动量轮本身的扰动大小不同,其激起的相机微振动环境由传递特性决定,应把具有较大扰动的动量轮放置在传递较小的路径上。传递界面对微振传递比影响较大,其次为距离的影响。
4)对相机处的微振动量级主要由最大扰动的动量轮贡献。4个轮同时转动时的相机次镜微振动与最大扰动动量轮单独转动时基本相当。
5)文中的微振动仿真分析方法可以由地面试验数据修正和验证,保证了仿真分析结果的可信性。分析结果表明,太阳翼会带来一低频的干扰影响。
[1] 张振华,杨雷,庞世伟.高精度航天器微振动力学环境分析[J].航天器环境工程,2009,26(6):528—534.ZHANG Zhen-hua,YANG Lei,PANG Shi-wei.Jitter Environment Analysis for Micro-precision Spacecraft[J].Spacecraft Environment Engineering,2009,26(6):528—534.
[2] 谭天乐,朱春艳,朱东方,等.航天器微振动测试、隔离、抑制技术综述[J].上海航天,2014,31(6):31—45.TAN Tian-le,ZHU Chun-yan,ZHU Dong-fang,et al.Overview of Micro-vibration Testing,Isolation and Suppression Tchnology for Spacecraft[J].Aerospace Shanghai,2014,31(6):31—45.
[3] 庞世伟,杨雷,曲广吉.高精度航天器微振动建模与评估技术最近进展[J].强度与环境,2007,34(6):1—9.PANG Shi-wei,YANG Lei,QU Guang-ji.New Development of Micro-vibration Integrated Modeling and Assessment Technology for High Performance Spacecraft[J].Structure and Environment Engineering,2007,34(6):1—9.
[4] 蒋国伟,周徐斌,沈军烽,等.某卫星微振动建模与仿真[J].航天器环境工程,2011,28(1):40—44.JIANG Guo-wei,ZHOU Xu-bin,SHEN Jun-feng,et al.Mod-eling and Simulation of Micro-vibration for a Satellite[J].Spacecraft Environment Engineering,2011,28(1):40—44.
[5] KIM Y.Thermal Creak Induced Dynamics of Space Structures[D].Boston:MIT,1999.
[6] COLLINS Simon A.Multi-axis Analog Adaptive Feed-forward Cancellation of Cryocooler Vibration[D].Boston:MIT,1994.
[7]BELY P Y,LUPIE O L,HERSHEY J L.The Line of Sight Jitter of the Hubble Space Telescope[C]//Proceedings of SPIE,1993.
[8]赵伟.航天器微振动环境分析与测量技术发展[J].航天器环境工程,2006,23(4):210—214.ZHAO Wei,Analysis on Micro-vibration Environment of Spacecraft and Measurement Technology[J].Spacecraft Environment Engineering,2006,23(4):210—214.
[9] 周东强,曹瑞,赵煜.遥感系列卫星在轨微振动测量与分析[J].航天器环境工程,2013,30(6):627—630.ZHOU Dong-qiang,CAO Rui,ZHAO Yu.Micro-vibration Measurement and Analysis of a Series of Remote Sensing Satellites In-orbit[J].Spacecraft Environment Engineering,2013,30(6):627—630.
[10]邹元杰,王泽宇,张志娟,等.航天器微振动稳态时域响应分析方法[J].航天器工程,2012,21(6):37—42.ZOU Yuan-jie,WANG Ze-yu,ZHANGH Zhi-juan,et al.Analysis Method of Steady Time-domain Response for Spacecraft Micro-vibration[J].Spacecraft Engineering,2012,21(6):37—42.
[11]葛东明,邹元杰,张志娟,等.基于全柔性卫星模型的控制闭环微振动建模与仿真[J].航天器工程,2012,21(5):36—41.GE Dong-ming,ZOU Yuan-jie,ZHANGH Zhi-juan,et al.Control Closed-loop Micro-vibration Modeling and Simulation Based on Flexible Satellite Model[J].Spacecraft Engineering,2012,21(5)36—41.
[12]葛东明,邹元杰.高分辨率卫星结构-控制-光学一体化建模与微振动响应分析[J].航天器环境工程,2013,30(6):586—590.GE Dong-ming,ZOU Yuan-jie.Structure-Control-Optics Integrated Modeling and Micro-vibration Analysis for High Resolution Satellite[J].SpacecraftEnvironmentEngineering,2013,30(6):586—590.
[13]刘涌,胡永力,王伟之,等.动量轮扰振对成像质量影响的全路径分析[J].航天器工程,2013,22(1):44—48.LIU Yong,HU Yong-li,WANG Wei-zhi,et al.Full Path Analysis of Momentum Wheel Jitter Effect on Imaging Quality[J].Spacecraft Engineering,2013,22(1):44—48.
[14]李连军,戴金海.反作用轮系统内干扰建模与仿真分析[J].系统仿真学报,2005,17(8):1855—1863.LI Lian-jun,DAI Jin-hai.Inner Disturbance Modeling and Simulation Analysis of Reaction Wheel System[J].Journal of System Simulation,2005,17(8):1855—1863.
[15]赵煜,张鹏飞,程伟.反作用轮扰动特性测量及研究[J].实验力学,2009,24(6):532—538.ZHAO Yu,ZHANG Peng-fei,CHEN Wei.Measurement and Study of Disturbance Characteristics of Reaction Wheel Assembly[J].Experimental Mechanics,2009,24(6):532—538.
