基于MEMS 的电子驻车制动系统倾角传感器研究
2015-05-27吴俊杰钟绍华周利涛
吴俊杰,钟绍华,周利涛
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,湖北 武汉430070;2.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉430070)
近年来,随着汽车电子技术的飞速发展,汽车电子产品在汽车上所占比例越来越大。作为最有潜力的传感器技术之一,MEMS 传感器在汽车领域得到了广泛的应用,MEMS 加速度计是到目前为止应用最广泛的微型传感器,最早被用于为汽车提供更多安全气囊的信息,以便准确判断事故发生[1];汽车座椅也安装了MEMS 加速度传感器,用于检测汽车碰撞时乘客的位置及运动;除了在被动安全系统上的应用,MEMS 也用于汽车主动安全系统,例如车辆稳定性控制系统、汽车防侧翻稳定性控制系统、紧急制动系统、胎压监测系统、适应车轮和地面的悬架系统等,MEMS 加速度传感器的应用提高了汽车的主动安全性能[2-3]。
随着人们对汽车主动安全及驾驶舒适性要求的提高,汽车电子驻车制动系统开始广泛应用于一些高配乘用车上。电子驻车制动系统主要功能之一是使汽车能够在0 ~30%坡度的坡道上安全停车及坡道起步,且其坡道上的驻车制动力大小取决于汽车倾角,因此汽车倾角传感器是汽车上测量坡道的最重要的元器件,其测量精度直接影响到整个系统工作的可靠性和稳定性。同时,由于传统的基于单一倾角传感器的测量方法误差较大,且汽车本身姿态的变化及噪声会对测量结果产生很大的干扰,因此,为得到精确的汽车倾角,开发高精度倾角传感器对于电子驻车制动系统工作的可靠性和稳定性研究非常重要[4-5]。笔者针对电子驻车制动系统在30%倾角条件下的高精度测量需求,设计出具有高精度和稳定性能的MEMS 倾角传感器,并利用卡尔曼滤波法对MEMS 传感器的倾角传感器和加速度计采集到的信号进行融合并滤除干扰信号,得到误差小于0.5°的汽车倾角测量值。
1 倾角传感器和加速度计的测量模型
目前汽车倾角传感器倾角的测量方式通常采用单一倾角传感器或单一加速度计,测量精度难以满足电子驻车制动系统对驻车制动力精确控制倾角值精度的要求。笔者采用由一个芬兰公司生产的倾角传感器SCA61T 和美国ADI 公司生产的加速度芯片ADXL203 组成的MEMS 倾角测量传感器,利用卡尔曼滤波法将所测信号进行融合并滤波(用加速度信号来补偿坡度信号),得到更精确的坡度信号。两个器件安装时应保持同轴度,以便测试倾角在同一平面内,保证测量精度。
1.1 倾角传感器SCA61T 的基本原理
笔者采用高精度3D MEMS 的单轴倾角计,倾角测量量程为±30°,零点输出为2.5 V,模拟分辨率为0.002 5°,测量灵敏度为70 mV/(°),非线性度为±0.11°,最大响应频率为28 Hz[6];该倾角计输出方式有SPI 输出和AD 输出两种,AD 将采集到的连续变化的信号实时传输给CPU,保证信号的高时效性,同时AD 还可以采集12 位分辨率的高精度模拟信号,因此,为更好地保证采集精度和速度,笔者采用AD 采集方式。SCA61T 倾角传感器的测量示意图如图1 所示。

图1 SCA61T 倾角测量示意图
由图1 可知,使用SCA61T 倾角传感器测量倾角时,倾角传感器处于水平位置即倾角为0°时,输出电压为2.5 V;测量倾角值越大,则输出电压越大;测量倾角值越小,则输出电压值越小。该传感器输出的电压值经过AD 转换成数字信号传给CPU,通过对电压信号的计算得到汽车倾角,该传感器倾角的计算方法为:

式中:Vout为传感器测试输出电压;offset为倾角等于0°时传感器的输出电压;sensitivity为测量灵敏度;αangel为该传感器所得的汽车倾角。
1.2 加速度计ADXL203 的基本原理
笔者采用ADI 公司生产的一种高精度双轴加速度计,加速度测量量程为±1.7 g,其测量灵敏度为1 000 mV/g,模拟分辨率为0.06°,非线性误差为满量程的±0.2%,传感器响应频率为5.5 Hz[7]。该加速度输出模拟电压信号,可直接对连续变化的信号进行AD 采样,得到更精确的加速度值,满足汽车电子驻车制动系统对加速度测量的要求。由于单轴加速度传感器测量倾角灵敏度趋近于90°时会逐渐下降,故采用双轴传感器测量,有相互垂直的两轴,其特性是随着一个轴的灵敏度降低,另一个轴的灵敏度会上升。ADXL203 双轴传感器测量示意图如图2 所示。
从图2 可以看出,ADXL203 加速度计对应有X轴和Y轴输出加速度值,且这两个输出量在物理上是相互垂直的,由式(2)~式(7)可计算出汽车倾角值。当重力为理想值1 g 时,输出加速度的计算公式为:

利用反三角函数将加速度转换成倾斜角:
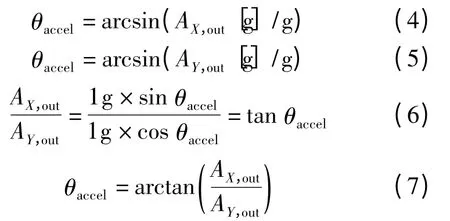
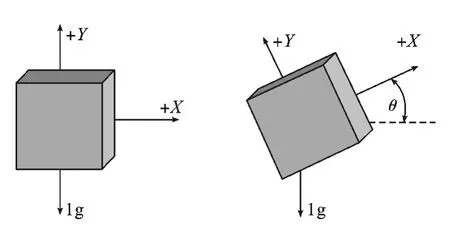
图2 ADXL203 倾角测量示意图
式中:AX,out[g]、AY,out[g]分别为加速度计X轴和Y轴输出值;θaccel为倾斜角。
2 基于卡尔曼滤波算法的数据融合
由于传统的惯性传感器经常采用单一倾角传感器,在测量汽车倾角时容易受到温度、噪声等影响,难以测出真实的汽车倾角。为此,笔者采用多传感器的结构,通过卡尔曼滤波算法对测试结果进行融合以得到更准确的汽车倾角。
卡尔曼滤波算法具有很强的抑制噪声干扰的能力,根据观测数据对随机量进行定量推断、对状态量进行最优估算,是一种“最优化自回归数据处理算法”[8]。卡尔曼滤波过程可以用两个方程来描述:①系统状态方程。主要描述系统状态量的更新,根据系统当前的状态和噪声方差来估计下一状态量;②动态系统测量方程。主要将系统的观测量输入到系统的状态方程中,通过系统状态的先验估计得到其后验估计。卡尔曼滤波算法在估计线性离散过程变量时需要用系统状态方程和动态系统测量方程来描述[9]。其中,系统状态方程为:

动态系统测量方程为:

式中:X(k)为k时刻系统的状态量;U(k)为k时刻系统的输入控制量;Z(k)为k时刻的测试量;W(k)和V(k)分别为过程噪声和测量噪声;A、B为系统参数矩阵;H为测量矩阵。
汽车倾角传感器信号的产生易受到外界干扰,满足状态方程条件,因此卡尔曼滤波算法是其最优的信号数据处理算法。结合MEMS 倾角测量系统的协方差及两个芯片器件倾角测量输出值,利用上述方法来估算系统的最优输出。
首先,通过上一状态系统方差和测量值(系统初值)预测出现在的状态;其次,根据现在的结果、系统状态方程和测量方程得到状态估算方程;最后,得到现在状态的最优估算值,即:

为卡尔曼增益;θ(k)为k时刻的最优倾角值;α(k)为k时刻倾角传感器的测量值;Rθ为测量噪声的协方差。
下一时刻θ(k)状态下的系统协方差方程:

根据式(10)和式(11)的算法,给出系统各个参数的初值和初始状态,卡尔曼滤波器可不断地递推下去,直到系统过程结束,从而估算出最优的系统状态,得到准确的倾角值。
为了验证以上算法的可靠性和精度,采用Matlab 工具进行了传感器倾角测量值和算法估计值的仿真分析。根据所选倾角传感器和加速度传感器的测量误差、均方差值及实测原始数据得到的倾角误差曲线如图3 所示。由图3 可以看出原始测量数据的误差范围为±4°,利用该数据作为计算电子驻车制动系统驻车制动力的参考值,计算结果可能会产生较大的偏差,可能造成制动力不足溜车或者制动力过大而对驻车制动系统产生一定程度的损坏。而经过卡尔曼滤波法滤波之后所得到的数据误差范围减少到±0.5°,可以更准确地作为电子驻车制动系统制动力的参考值,能够得到更好的制动性能,保证汽车制动的可靠性和安全性,同时可为汽车倾角测量传感器提供重要的理论研究依据。
3 汽车车身姿态测量的硬件电路图
该倾角传感器硬件系统主要包括一个倾角采集模块、一个加速度采集模块、一个微控制器、一个电源模块、一个RS -485 通信模块和一个PC上位机,其硬件结构如图4 所示。
汽车倾角信号的采集主要由两部分测量值融合而成,倾角传感器SCA61T 输出模式有模拟信号输出和SPI 信号输出,考虑到电子驻车制动系统对系统响应时间的要求,笔者采用精度和采集速度较高的AD 采集方式。加速度计ADXL203辅助测量倾角,采用精度较高的12 位分辨率AD采集。SCA61T 和ADXL203 器件信号采集电路图分别如图5 和图6 所示。微控制器采用飞思卡尔MC9S12XDT256 单片机,该单片机集成了12 位AD 通信模块、SCI 通信接口,这款高性能的16 bit微处理器能够更快速、准确地与外围各模块之间通信并实现信息共享,同时将接收到的各信号在单片机内部按照所编写的软件算法进行融合和滤波,将处理好的信号通过RS -485 和上位机进行显示和监控,以便查询和调试。

图3 倾角测量卡尔曼滤波仿真曲线

图4 系统硬件结构框图

图5 SCA61T 倾角信号采集电路
由上述两个信号采集电路组成传感器硬件电路的核心,采用精度较高的12 位AD 采集,采样时间为7 μs,在CPU 内经过卡尔曼滤波算法滤除其中干扰较大的随机信号和杂波,得到较为可靠的倾角值。

图6 ADXL203 加速度信号采集电路
4 系统软件设计及流程图
整个系统软件程序的设计主要包括系统各模块初始化、AD 传感器信号采集与处理、RS -485和上位机通信,以及测量数据发送到上位机。系统软件流程图如图7 所示。将由倾角芯片SCA61T 和加速度计ADXL203 组成的MEMS 传感器安装在主板PCB 上,为了保证测量数据的精确性,必须保持两个芯片的安装位置及角度。首先,芯片底面必须与车身保持在同一水平面;其次,芯片安装必须保证测量轴线方向与汽车纵轴线平行,以消除安装误差对测试结果造成的影响。在设计的流程图中,微控制器在读取实时倾角值的同时读取加速度计的数据,并利用加速度计的数据来校正和补偿所测倾角值,通过数据融合算法计算出精确度更高的汽车倾角。

图7 系统软件流程图
5 实验结果分析
基于以上设计方案,设计MEMS 倾角传感器实验台架,并在0° ~20°范围内每间隔1°进行倾角测量,其测量结果如表1 所示。
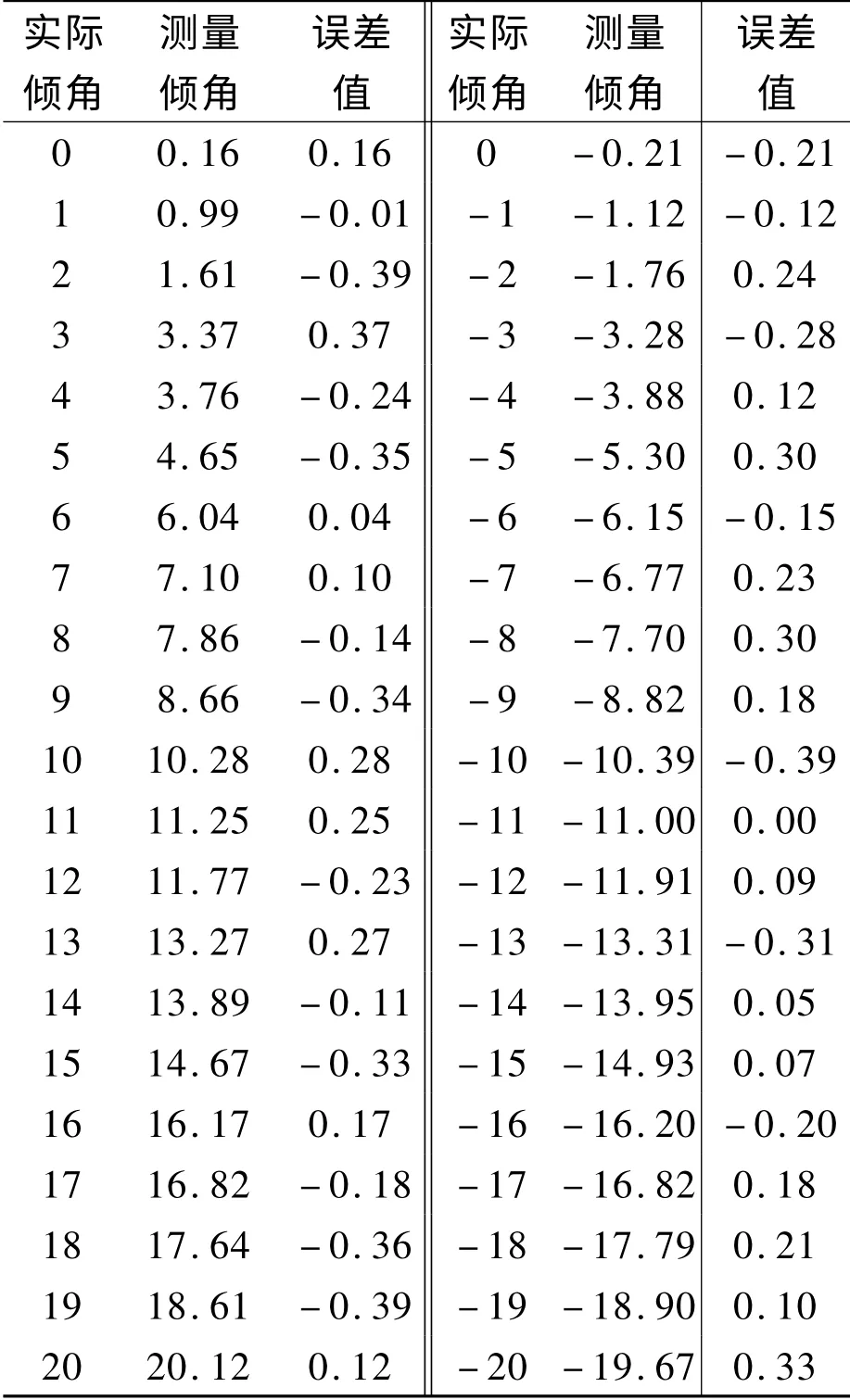
表1 实验台架倾角测试结果 (°)
实验结果表明,该MEMS 倾角传感器设计方案可准确测量汽车±20°内的倾角,误差值在±0.5°内。
6 结论
基于倾角传感器SCA61T 和加速度传感器ADXL203 设计了一种MEMS 器件的汽车倾角传感器,采用卡尔曼滤波法对两种信号进行融合并滤除干扰;同时设计了试验样机并进行了±20°内的倾角测量试验,根据试验结果进行了误差分析。实验结果表明,该设计具有较高的精度和可靠性,可为电子驻车制动系统施加准确的驻车制动力提供重要参考。随着MEMS 技术的发展,除了在电子驻车制动系统有很高的实用价值外,高精度和可靠性的MEMS 惯性传感器在汽车其他领域有着更广阔的前景。
[1]闫冬,管欣,高振海.基于MEMS 技术的微惯性传感器及在汽车上的应用[J].汽车技术,2006(2):1-7.
[2]吴雄.汽车MEMS 传感器的应用及发展[J].传感器世界,2002,8(3):7 -11.
[3]HARBE Y,WEINBER G.MEMS 惯性传感器在汽车中的应用[J].电子产品世界,2005(24):75 -77.
[4]MASSEL T,DING E L,ARNDT M. Identification and road gradient and vehicle pitch angle[C]//Proceedings of the 2004 IEEE International Conference on Control Applications.Taipei:[s.n.],2004:1284-1289.
[5]MASSEL T,DING E L,ARNDT M.Investigation of different techniques for determining the road uphill gradient and pitch angle of vehicles[C]//Proceedings of the 2004 American Control Conference. Boston:[s.n.],2004:2763 - 2768.
[6]Vti Technologies.SCA61T Datasheet[DB/OL].[2015 -01-29]. www.muratamems.fi.
[7]Analog Devices Inc. ADXL 203 Datasheet[DB/OL].[2015 -01 -29].www.analog.com.
[8]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2012:26 -50.
[9]KALMAN R E.A new approach to linear filtering and prediction problems[J]. Journal of Fluids Engineering,1960,82(1):35 -45.
